
Tensegrity

| Stereo image | |||
|---|---|---|---|
| |||
| |||
| |||
| |||
| Animation A similar structure but with four compression members. | |||

Tensegrity, tensional integrity or floating compression is a structural principle based on a system of isolated components under compression inside a network of continuous tension, and arranged in such a way that the compressed members (usually bars or struts) do not touch each other while the prestressed tensioned members (usually cables or tendons) delineate the system spatially.[1]
Tensegrity structures are found in both nature as well as human-made objects: in the human body, the bones are held in compression while the connective tissues are held in tension, and the same principles have been applied to furniture and architectural design and beyond.
The term was coined by Buckminster Fuller in the 1960s as a portmanteau of "tensional integrity".[2]
Core Concept
[edit]Tensegrity is characterized by several foundational principles that define its unique properties:
- Continuous Tension: Fundamental to tensegrity, the tension elements—typically cables or tendons—form a continuous network that encases the entire structure. This allows for the even distribution of mechanical stresses and maintains the structural form, contributing to the overall stability and flexibility of the system.
- Discontinuous Compression: The compression components, such as struts or rods, are distinct in that they do not make direct contact with each other but are instead suspended within the tension network. This eliminates the need for rigid connections, enhancing the structural efficiency and resilience of the system.
- Pre-stressed: A key aspect of tensegrity structures is their pre-stressed state, in which tension elements are tightened during the assembly process. Pre-stressing contributes significantly to the structural stiffness and stability, ensuring that all elements are either in tension or compression at all times.
- Self-equilibration: Tensegrity structures are self-equilibrating and so automatically distribute internal stresses across the structure. This allows them to adapt to varying loads without losing structural integrity.
- Minimalism and Efficiency: Tensegrity systems employ a minimalist design philosophy, utilizing the minimum amount of materials to achieve maximum structural strength.
- Scalability and Modularity: The design principles of tensegrity allow for scalability and modular construction. Tensegrity structures to be easily adapted or expanded in size and complexity according to specific requirements.
Because of these patterns, no structural member experiences a bending moment and there are no shear stresses within the system. This can produce exceptionally strong and rigid structures for their mass and for the cross section of the components.
These principles collectively enable tensegrity structures to achieve a balance of strength, resilience, and flexibility, making the concept widely applicable across disciplines including architecture, robotics, and biomechanics.
Early Example
[edit]
A conceptual building block of tensegrity is seen in the 1951 Skylon. Six cables, three at each end, hold the tower in position. The three cables connected to the bottom "define" its location. The other three cables are simply keeping it vertical.
A three-rod tensegrity structure (shown above in a spinning drawing of a T3-Prism) builds on this simpler structure: the ends of each green rod look like the top and bottom of the Skylon. As long as the angle between any two cables is smaller than 180°, the position of the rod is well defined. While three cables are the minimum required for stability, additional cables can be attached to each node for aesthetic purposes and for redundancy. For example, Snelson's Needle Tower uses a repeated pattern built using nodes that are connected to 5 cables each.
Eleanor Heartney points out visual transparency as an important aesthetic quality of these structures.[3] Korkmaz et al. has argued that lightweight tensegrity structures are suitable for adaptive architecture.[4][5]
Applications
[edit]Architecture
[edit]Tensegrities saw increased application in architecture beginning in the 1960s, when Maciej Gintowt and Maciej Krasiński designed Spodek arena complex (in Katowice, Poland), as one of the first major structures to employ the principle of tensegrity. The roof uses an inclined surface held in check by a system of cables holding up its circumference. Tensegrity principles were also used in David Geiger's Seoul Olympic Gymnastics Arena (for the 1988 Summer Olympics), and the Georgia Dome (for the 1996 Summer Olympics). Tropicana Field, home of the Tampa Bay Rays major league baseball team, also has a dome roof supported by a large tensegrity structure.
.jpg)
On 4 October 2009, the Kurilpa Bridge opened across the Brisbane River in Queensland, Australia. A multiple-mast, cable-stay structure based on the principles of tensegrity, it is currently the world's largest tensegrity bridge.
Robotics
[edit]
Since the early 2000s, tensegrities have also attracted the interest of roboticists due to their potential to design lightweight and resilient robots. Numerous researches have investigated tensegrity rovers,[6] bio-mimicking robots,[7][8][9] and modular soft robots.[10] The most famous tensegrity robot is the Super Ball Bot,[11] a rover for space exploration using a 6-bar tensegrity structure, currently under developments at NASA Ames.
Anatomy
[edit]Biotensegrity, a term coined by Stephen Levin, is an extended theoretical application of tensegrity principles to biological structures.[12] Biological structures such as muscles, bones, fascia, ligaments and tendons, or rigid and elastic cell membranes, are made strong by the unison of tensioned and compressed parts. The musculoskeletal system consists of a continuous network of muscles and connective tissues,[13] while the bones provide discontinuous compressive support, whilst the nervous system maintains tension in vivo through electrical stimulus. Levin claims that the human spine, is also a tensegrity structure although there is no support for this theory from a structural perspective.[14]
Biochemistry
[edit]Donald E. Ingber has developed a theory of tensegrity to describe numerous phenomena observed in molecular biology.[15] For instance, the expressed shapes of cells, whether it be their reactions to applied pressure, interactions with substrates, etc., all can be mathematically modelled by representing the cell's cytoskeleton as a tensegrity. Furthermore, geometric patterns found throughout nature (the helix of DNA, the geodesic dome of a volvox, Buckminsterfullerene, and more) may also be understood based on applying the principles of tensegrity to the spontaneous self-assembly of compounds, proteins,[16] and even organs. This view is supported by how the tension-compression interactions of tensegrity minimize material needed to maintain stability and achieve structural resiliency, although the comparison with inert materials within a biological framework has no widely accepted premise within physiological science.[17] Therefore, natural selection pressures would likely favor biological systems organized in a tensegrity manner.
As Ingber explains:
The tension-bearing members in these structures – whether Fuller's domes or Snelson's sculptures – map out the shortest paths between adjacent members (and are therefore, by definition, arranged geodesically). Tensional forces naturally transmit themselves over the shortest distance between two points, so the members of a tensegrity structure are precisely positioned to best withstand stress. For this reason, tensegrity structures offer a maximum amount of strength.[15]
In embryology, Richard Gordon proposed that embryonic differentiation waves are propagated by an 'organelle of differentiation'[18] where the cytoskeleton is assembled in a bistable tensegrity structure at the apical end of cells called the 'cell state splitter'.[19]
Origins and art history
[edit]
The origins of tensegrity are controversial.[21] Many traditional structures, such as skin-on-frame kayaks and shōji, use tension and compression elements in a similar fashion.
Russian artist Viatcheslav Koleichuk claimed that the idea of tensegrity was invented first by Kārlis Johansons (in Russian as German as Karl Ioganson) (lv), a Soviet avant-garde artist of Latvian descent, who contributed some works to the main exhibition of Russian constructivism in 1921.[22] Koleichuk's claim was backed up by Maria Gough for one of the works at the 1921 constructivist exhibition.[23] Snelson has acknowledged the constructivists as an influence for his work (query?).[24] French engineer David Georges Emmerich has also noted how Kārlis Johansons's work (and industrial design ideas) seemed to foresee tensegrity concepts.[25]
In fact, some scientific paper proves this fact, showing the images of the first Simplex structures (made with 3 bars and 9 tendons) developed by Ioganson. [26]
In 1948, artist Kenneth Snelson produced his innovative "X-Piece" after artistic explorations at Black Mountain College (where Buckminster Fuller was lecturing) and elsewhere. Some years later, the term "tensegrity" was coined by Fuller, who is best known for his geodesic domes. Throughout his career, Fuller had experimented with incorporating tensile components in his work, such as in the framing of his dymaxion houses.[27]
Snelson's 1948 innovation spurred Fuller to immediately commission a mast from Snelson. In 1949, Fuller developed a tensegrity-icosahedron based on the technology, and he and his students quickly developed further structures and applied the technology to building domes. After a hiatus, Snelson also went on to produce a plethora of sculptures based on tensegrity concepts. His main body of work began in 1959 when a pivotal exhibition at the Museum of Modern Art took place. At the MOMA exhibition, Fuller had shown the mast and some of his other work.[28] At this exhibition, Snelson, after a discussion with Fuller and the exhibition organizers regarding credit for the mast, also displayed some work in a vitrine.[29]
Snelson's best-known piece is his 26.5-meter-high (87 ft) Needle Tower of 1968.[30]
Mathematics of Tensegrity
[edit]The loading of at least some tensegrity structures causes an auxetic response and negative Poisson ratio, e.g. the T3-prism and 6-strut tensegrity icosahedron.
Tensegrity prisms
[edit]The three-rod tensegrity structure (3-way prism) has the property that, for a given (common) length of compression member "rod" (there are three total) and a given (common) length of tension cable "tendon" (six total) connecting the rod ends together, there is a particular value for the (common) length of the tendon connecting the rod tops with the neighboring rod bottoms that causes the structure to hold a stable shape. For such a structure, it is straightforward to prove that the triangle formed by the rod tops and that formed by the rod bottoms are rotated with respect to each other by an angle of 5π/6 (radians).[31]
The stability ("prestressability") of several 2-stage tensegrity structures are analyzed by Sultan, et al.[32]
The T3-prism (also known as Triplex) can be obtained through form finding of a straight triangular prism. Its self-equilibrium state is given when the base triangles are in parallel planes separated by an angle of twist of π/6. The formula for its unique self-stress state is given by,[33]Here, the first three negative values correspond to the inner components in compression, while the rest correspond to the cables in tension.
![{\displaystyle \omega =\omega _{1}[-{\sqrt {3}},-{\sqrt {3}},-{\sqrt {3}},{\sqrt {3}},{\sqrt {3}},{\sqrt {3}},1,1,1,1,1,1]^{T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cdf881ba88de87799c28d2fcb13c5b26fe0febf2)
Tensegrity icosahedra
[edit]


The tensegrity icosahedron, first studied by Snelson in 1949,[34] has struts and tendons along the edges of a polyhedron called Jessen's icosahedron. It is a stable construction, albeit with infinitesimal mobility.[35][36] To see this, consider a cube of side length 2d, centered at the origin. Place a strut of length 2l in the plane of each cube face, such that each strut is parallel to one edge of the face and is centered on the face. Moreover, each strut should be parallel to the strut on the opposite face of the cube, but orthogonal to all other struts. If the Cartesian coordinates of one strut are and , those of its parallel strut will be, respectively, and . The coordinates of the other strut ends (vertices) are obtained by permuting the coordinates, e.g., (rotational symmetry in the main diagonal of the cube).





The distance s between any two neighboring vertices (0, d, l) and (d, l, 0) is

Imagine this figure built from struts of given length 2l and tendons (connecting neighboring vertices) of given length s, with . The relation tells us there are two possible values for d: one realized by pushing the struts together, the other by pulling them apart. In the particular case the two extremes coincide, and , therefore the figure is the stable tensegrity icosahedron. This choice of parameters gives the vertices the positions of Jessen's icosahedron; they are different from the regular icosahedron, for which the ratio of and would be the golden ratio, rather than 2. However both sets of coordinates lie along a continuous family of positions ranging from the cuboctahedron to the octahedron (as limit cases), which are linked by a helical contractive/expansive transformation. This kinematics of the cuboctahedron is the geometry of motion of the tensegrity icosahedron. It was first described by H. S. M. Coxeter[37] and later called the "jitterbug transformation" by Buckminster Fuller.[38][39]





Since the tensegrity icosahedron represents an extremal point of the above relation, it has infinitesimal mobility: a small change in the length s of the tendon (e.g. by stretching the tendons) results in a much larger change of the distance 2d of the struts.[40]
Patents
[edit]- U.S. patent 3,063,521, "Tensile-Integrity Structures," 13 November 1962, Buckminster Fuller.
- French Patent No. 1,377,290, "Construction de Reseaux Autotendants", 28 September 1964, David Georges Emmerich.
- French Patent No. 1,377,291, "Structures Linéaires Autotendants", 28 September 1964, David Georges Emmerich.
- U.S. patent 3,139,957, "Suspension Building" (also called aspension), 7 July 1964, Buckminster Fuller.
- U.S. patent 3,169,611, "Continuous Tension, Discontinuous Compression Structure," 16 February 1965, Kenneth Snelson.
- U.S. patent 3,866,366, "Non-symmetrical Tension-Integrity Structures," 18 February 1975, Buckminster Fuller.
Basic tensegrity structures
[edit]-
 The simplest tensegrity structure, a 3-prism
The simplest tensegrity structure, a 3-prism -
 Another 3-prism
Another 3-prism -
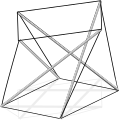 A similar structure but with four compression members
A similar structure but with four compression members -
![Proto-Tensegrity Prism by Karl Ioganson, 1921[gallery 1]](//upload.wikimedia.org/wikipedia/commons/thumb/6/6b/Proto-Tensegrity_by_Ioganson.jpg/120px-Proto-Tensegrity_by_Ioganson.jpg) Proto-Tensegrity Prism by Karl Ioganson, 1921[gallery 1]
Proto-Tensegrity Prism by Karl Ioganson, 1921[gallery 1] -
![Tensegrity Icosahedron, Buckminster Fuller, 1949[gallery 2]](//upload.wikimedia.org/wikipedia/commons/thumb/9/95/Tensegrity_Icosahedron.png/120px-Tensegrity_Icosahedron.png) Tensegrity Icosahedron, Buckminster Fuller, 1949[gallery 2]
Tensegrity Icosahedron, Buckminster Fuller, 1949[gallery 2] -
![Tensegrity Tetrahedron, Francesco della Salla, 1952[gallery 3]](//upload.wikimedia.org/wikipedia/commons/thumb/a/af/Tensegrity_Tetrahedron.png/120px-Tensegrity_Tetrahedron.png) Tensegrity Tetrahedron, Francesco della Salla, 1952[gallery 3]
Tensegrity Tetrahedron, Francesco della Salla, 1952[gallery 3] -
![Tensegrity X-Module Tetrahedron, Kenneth Snelson, 1959[gallery 4]](//upload.wikimedia.org/wikipedia/commons/thumb/0/07/Tensegrity_X-Module_Tetrahedron.png/120px-Tensegrity_X-Module_Tetrahedron.png) Tensegrity X-Module Tetrahedron, Kenneth Snelson, 1959[gallery 4]
Tensegrity X-Module Tetrahedron, Kenneth Snelson, 1959[gallery 4]



![Proto-Tensegrity Prism by Karl Ioganson, 1921[gallery 1]](/wiki/File:Proto-Tensegrity_by_Ioganson.jpg)
![Tensegrity Icosahedron, Buckminster Fuller, 1949[gallery 2]](/wiki/File:Tensegrity_Icosahedron.png)
![Tensegrity Tetrahedron, Francesco della Salla, 1952[gallery 3]](/wiki/File:Tensegrity_Tetrahedron.png)
![Tensegrity X-Module Tetrahedron, Kenneth Snelson, 1959[gallery 4]](/wiki/File:Tensegrity_X-Module_Tetrahedron.png)
Tensegrity structures
[edit]-
 Kenneth Snelson's Needle Tower art sculpture.
Kenneth Snelson's Needle Tower art sculpture. -
 A tensegrity dome made of garden stakes and nylon twine built in the yard of a house, 2009
A tensegrity dome made of garden stakes and nylon twine built in the yard of a house, 2009 -
 A 12m high tensegrity structure exhibit at the Science City, Kolkata.
A 12m high tensegrity structure exhibit at the Science City, Kolkata. -
 Dissipate, an hourglass tower art sculpture including tensegrity structure, constructed at AfrikaBurn, 2015, a Burning Man regional event
Dissipate, an hourglass tower art sculpture including tensegrity structure, constructed at AfrikaBurn, 2015, a Burning Man regional event




{kind=link}
See also
[edit]- Cloud Nine – Proposed airborne habitats, giant sky-floating tensegrity spheres named by Buckminster Fuller
- Hyperboloid structure – Type of unbounded quadratic surface-shaped building or work
- Interactions of actors theory
- Saddle roof – type of roof structure
- Space frame – Rigid three dimensional load bearing truss structure
- Synergetics – Empirical study of systems in transformation
- Tensairity
- Tensile structure – Structure whose members are only in tension
- Thin-shell structure – Thin-walled geometric solid
- Kinematics of the cuboctahedron – Symmetrical transformations of the cuboctahedron into related uniform polyhedra, the geometry of the motion of the tensegrity icosahedron
Notes
[edit]- ^ Gómez-Jáuregui 2010, p. 28. Fig. 2.1
- ^ Fuller & Marks 1960, Fig. 270
- ^ Fuller & Marks 1960, Fig. 268.
- ^ Lalvani 1996, p. 47
References
[edit]- ^ Gómez-Jáuregui 2010, p. 19.
- ^ Swanson, RL (2013). "Biotensegrity: a unifying theory of biological architecture with applications to osteopathic practice, education, and research-a review and analysis". The Journal of the American Osteopathic Association. 113 (1): 34–52. doi:10.7556/jaoa.2013.113.1.34. PMID 23329804.
- ^ Hartley, Eleanor (19 February – 21 March 2009), "Ken Snelson and the Aesthetics of Structure", Kenneth Snelson: Selected Work: 1948–2009 (exhibition catalogue), Marlborough Gallery
- ^ Korkmaz, Bel Hadj Ali & Smith 2011
- ^ Korkmaz, Bel Hadj Ali & Smith 2012
- ^ Sabelhaus, Andrew P.; Bruce, Jonathan; Caluwaerts, Ken; Manovi, Pavlo; Firoozi, Roya Fallah; Dobi, Sarah; Agogino, Alice M.; SunSpiral, Vytas (May 2015). "System design and locomotion of SUPERball, an untethered tensegrity robot". 2015 IEEE International Conference on Robotics and Automation (ICRA). Seattle, WA, USA: IEEE. pp. 2867–2873. doi:10.1109/ICRA.2015.7139590. hdl:2060/20160001750. ISBN 978-1-4799-6923-4. S2CID 8548412.
- ^ Lessard, Steven; Castro, Dennis; Asper, William; Chopra, Shaurya Deep; Baltaxe-Admony, Leya Breanna; Teodorescu, Mircea; SunSpiral, Vytas; Agogino, Adrian (October 2016). "A bio-inspired tensegrity manipulator with multi-DOF, structurally compliant joints". 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE. pp. 5515–5520. arXiv:1604.08667. doi:10.1109/iros.2016.7759811. ISBN 978-1-5090-3762-9. S2CID 4507700.
- ^ Zappetti, Davide; Arandes, Roc; Ajanic, Enrico; Floreano, Dario (5 June 2020). "Variable-stiffness tensegrity spine". Smart Materials and Structures. 29 (7): 075013. Bibcode:2020SMaS...29g5013Z. doi:10.1088/1361-665x/ab87e0. ISSN 0964-1726. S2CID 216237847.
- ^ Liu, Yixiang; Dai, Xiaolin; Wang, Zhe; Bi, Qing; Song, Rui; Zhao, Jie; Li, Yibin (2022). "A Tensegrity-Based Inchworm-Like Robot for Crawling in Pipes With Varying Diameters". IEEE Robotics and Automation Letters. 7 (4): 11553–11560. doi:10.1109/LRA.2022.3203585. ISSN 2377-3766. S2CID 252030788.
- ^ Zappetti, D.; Mintchev, S.; Shintake, J.; Floreano, D. (2017), "Bio-inspired Tensegrity Soft Modular Robots", Biomimetic and Biohybrid Systems, Cham: Springer International Publishing, pp. 497–508, arXiv:1703.10139, doi:10.1007/978-3-319-63537-8_42, ISBN 978-3-319-63536-1, S2CID 822747
- ^ Hall, Loura (2 April 2015). "Super Ball Bot". NASA. Retrieved 18 June 2020.
- ^ Levin, Stephen (2015). "16. Tensegrity, The New Biomechanics". In Hutson, Michael; Ward, Adam (eds.). Oxford Textbook of Musculoskeletal Medicine. Oxford University Press. pp. 155–56, 158–60. ISBN 978-0-19-967410-7.
- ^ Souza et al. 2009.
- ^ Levin, Stephen M. (1 September 2002). "The tensegrity-truss as a model for spine mechanics: biotensegrity". Journal of Mechanics in Medicine and Biology. 02 (3n04): 375–88. doi:10.1142/S0219519402000472. ISSN 0219-5194.
- ^ Jump up to: a b Ingber, Donald E. (January 1998). "The Architecture of Life" (PDF). Scientific American. 278 (1): 48–57. Bibcode:1998SciAm.278a..48I. doi:10.1038/scientificamerican0198-48. PMID 11536845. Archived from the original (PDF) on 15 May 2005.
- ^ Edwards, Scott A.; Wagner, Johannes; Gräter, Frauke (2012). "Dynamic Prestress in a Globular Protein". PLOS Computational Biology. 8 (5): e1002509. Bibcode:2012PLSCB...8E2509E. doi:10.1371/journal.pcbi.1002509. PMC 3349725. PMID 22589712.
- ^ Skelton, Robert (2016). "Globally stable minimal mass compressive tensegrity structures". Composite Structures. 141: 346–54. doi:10.1016/j.compstruct.2016.01.105.
- ^ Gordon, Natalie K.; Gordon, Richard (2016). "The organelle of differentiation in embryos: The cell state splitter". Theoretical Biology and Medical Modelling. 13: 11. doi:10.1186/s12976-016-0037-2. PMC 4785624. PMID 26965444.
- ^ Gordon, Richard (1999). The Hierarchical Genome and Differentiation Waves. Series in Mathematical Biology and Medicine. Vol. 3. doi:10.1142/2755. ISBN 978-981-02-2268-0.
- ^ Gough 1998, p. 109.
- ^ Gómez-Jáuregui, V. (2009). "Controversial Origins of Tensegrity" (PDF). International Association of Spatial Structures IASS Symposium 2009, Valencia.
- ^ Droitcour, Brian (18 August 2006). "Building Blocks". The Moscow Times. Archived from the original on 7 October 2008. Retrieved 28 March 2011.
With an unusual mix of art and science, Vyacheslav Koleichuk resurrected a legendary 1921 exhibition of Constructivist art.
- ^ Gough 1998.
- ^ In Snelson's article for Lalvani, 1996, I believe.[full citation needed]
- ^ David Georges Emmerich, Structures Tendues et Autotendantes, Paris: Ecole d'Architecture de Paris la Villette, 1988, pp. 30–31.
- ^ Gómez-Jáuregui, V. et al. (2023) “Tensegrity Applications to Architecture, Engineering and Robotics: A Review Archived 2024-01-19(Timestamp length) at the Wayback Machine&rdquo. Appl. Sci. 2023, 13(15), 8669; https://doi.org/10.3390/app13158669
- ^ Fuller & Marks 1960, Ch. Tensegrity.
- ^ See photo of Fuller's work at this exhibition in his 1961 article on tensegrity for the Portfolio and Art News Annual (No. 4).
- ^ Lalvani 1996, p. 47.
- ^ "Needle tower".
- ^ Burkhardt, Robert William Jr. (2008), A Practical Guide to Tensegrity Design (PDF), archived (PDF) from the original on 20 December 2004
- ^ Sultan, Cornel; Martin Corless; Robert E. Skelton (2001). "The prestressability problem of tensegrity structures: some analytical solutions" (PDF). International Journal of Solids and Structures. 26: 145. Archived from the original (PDF) on 23 October 2015.
- ^ Aloui, Omar; Flores, Jessica; Orden, David; Rhode-Barbarigos, Landolf (1 April 2019). "Cellular morphogenesis of three-dimensional tensegrity structures". Computer Methods in Applied Mechanics and Engineering. 346: 85–108. arXiv:1902.09953. Bibcode:2019CMAME.346...85A. doi:10.1016/j.cma.2018.10.048. ISSN 0045-7825. S2CID 67856423.
- ^ Cera, Angelo Brian Micubo (2020). Design, Control, and Motion Planning of Cable-Driven Flexible Tensegrity Robots (Ph.D. thesis). University of California, Berkeley. p. 5.
- ^ Kenner 1976, pp. 11–19, §2. Spherical tensegrities.
- ^ "Tensegrity Figuren". Universität Regensburg. Archived from the original on 26 May 2013. Retrieved 2 April 2013.
- ^ Coxeter, H.S.M. (1973) [1948]. "3.7 Coordinates for the vertices of the regular and quasi-regular solids". Regular Polytopes (3rd ed.). New York: Dover. pp. 51–52.
- ^ Archived at Ghostarchive and the Wayback Machine: Fuller, R. Buckminster (22 October 2010), Vector Equilibrium, retrieved 22 February 2019
- ^ Verheyen, H.F. (1989). "The complete set of Jitterbug transformers and the analysis of their motion". Computers & Mathematics with Applications. 17, 1–3 (1–3): 203–250. doi:10.1016/0898-1221(89)90160-0.
- ^ Kenner 1976, pp. 16–19, Elasticity multiplication.
Bibliography
[edit]This article includes a list of general references, but it lacks sufficient corresponding inline citations. (March 2009) |
- Fuller, R. Buckminster (1961). "Tensegrity". Portfolio and Art News Annual (4): 112–127, 144, 148.
- — (1982) [1975]. Synergetics: Explorations in the Geometry of Thinking. Vol. I. Macmillan. ISBN 978-0-02-065320-2.
- — (1983) [1979]. Synergetics 2: Further Explorations in the Geometry of Thinking. Vol. 2. Macmillan. ISBN 978-0-02-092640-5. Online
- —; Marks, Robert W. (1973) [1960]. The Dymaxion World of Buckminster Fuller. Anchor Books. Figs. 261–280. ISBN 978-0-385-01804-3. A good overview on the scope of tensegrity from Fuller's point of view, and an interesting overview of early structures with careful attributions most of the time.
- Kenner, Hugh (1976). Geodesic Math and How to Use It. University of California Press. ISBN 978-0-520-02924-8. 2003 reprint ISBN 0520239318. This is a good starting place for learning about the mathematics of tensegrity and building models.
- Gómez-Jáuregui, Valentin (2007). Tensegridad. Estructuras Tensegríticas en Ciencia y Arte (in Spanish). Santander: Universidad de Cantabria. ISBN 978-84-8102-437-1.
- — (2010). Tensegrity Structures and their Application to Architecture. Santander: Servicio de Publicaciones de la Universidad de Cantabria. ISBN 978-84-8102-575-0.
- Gough, Maria (Spring 1998). "In the Laboratory of Constructivism: Karl Ioganson's Cold Structures". October. 84: 90–117. doi:10.2307/779210. JSTOR 779210.
- Juan, S. J.; Tur, J M (July 2008). "Tensegrity frameworks: Static analysis review". Mechanism and Machine Theory. 43 (7): 859–81. CiteSeerX 10.1.1.574.7510. doi:10.1016/j.mechmachtheory.2007.06.010.
- Korkmaz, Sinan; Bel Hadj Ali, Nizar; Smith, Ian F.C. (June 2011). "Determining Control Strategies for Damage Tolerance of an Active Tensegrity Structure" (PDF). Engineering Structures. 33 (6): 1930–1939. Bibcode:2011EngSt..33.1930K. CiteSeerX 10.1.1.370.6243. doi:10.1016/j.engstruct.2011.02.031. Archived from the original (PDF) on 29 September 2011.
- —; —; — (January 2012). "Configuration of Control System for Damage Tolerance of a Tensegrity Bridge". Advanced Engineering Informatics. 26 (1): 145–155. doi:10.1016/j.aei.2011.10.002.
- Lalvani, Haresh, ed. (1996). "Origins of Tensegrity: Views of Emmerich, Fuller and Snelson". International Journal of Space Structures. 11 (1–2): 27–55. doi:10.1177/026635119601-204. S2CID 114004009.
- Souza, Thales R.; Fonseca, Sérgio T.; Gonçalves, Gabriela G.; Ocarino, Juliana M.; Mancini, Marisa C. (October 2009). "Prestress revealed by passive co-tension at the ankle joint". Journal of Biomechanics. 42 (14): 2374–80. doi:10.1016/j.jbiomech.2009.06.033. PMID 19647832.
Further reading
[edit]- Edmondson, Amy (2007). "A Fuller Explanation", Emergent World LLC
- Forbes, Peter (2010) [2006]. "9. The Push and Pull Building System". The Gecko's Foot: How Scientists are Taking a Leaf from Nature's Book. Harper Collins. pp. 197–230. ISBN 978-0-00-740547-3.
- Hanaor, Ariel (1997). "13. Tensegrity: Theory and Application". In Gabriel, J. François (ed.). Beyond the Cube: The Architecture of Space Frames and Polyhedra. Wiley. pp. 385–408. ISBN 978-0-471-12261-6.
- Masic, Milenko; Skelton, Robert E.; Gill, Philip E. (August 2005). "Algebraic tensegrity form-finding". International Journal of Solids and Structures. 42 (16–17): 4833–4858. doi:10.1016/j.ijsolstr.2005.01.014. They present the remarkable result that any linear transformation of a tensegrity is also a tensegrity.
- Morgan, G.J. (2003). "Historical Review: Viruses, Crystals and Geodesic Domes". Trends in Biochemical Sciences. 28 (2): 86–90. doi:10.1016/S0968-0004(02)00007-5. PMID 12575996.
- Motro, R. (1992). "Tensegrity Systems: The State of the Art". International Journal of Space Structures. 7 (2): 75–84. doi:10.1177/026635119200700201. S2CID 107820090.
- Pugh, Anthony (1976). An Introduction to Tensegrity. University of California Press. ISBN 978-0-520-03055-8. Archived from the original on 4 May 2008. Retrieved 9 May 2008.
- Snelson, Kenneth (November 1990). "Letter to R. Motro". International Journal of Space Structures.
- Vilnay, Oren (1990). Cable Nets and Tensegric Shells: Analysis and Design Applications, New York: Ellis Horwood Ltd. [ISBN missing]
- Wang, Bin-Bing (1998). "Cable-strut systems: Part I – Tensegrity". Journal of Constructional Steel Research. 45 (3): 281–89. doi:10.1016/S0143-974X(97)00075-8.
- Wilken, Timothy (2001). Seeking the Gift Tensegrity, TrustMark [ISBN missing]
External links
[edit]- Scientific Publications in the Field of Tensegrity by Swiss Federal Institute of Technology (EPFL), Applied Computing and Mechanics Laboratory (IMAC)
- Stephen Levin's Biotensegrity site Several papers on the tensegrity mechanics of biologic structures from viruses to vertebrates by an Orthopedic Surgeon.