Центростремительный сплайн Катмулла – Рома
В компьютерной графике центростремительный сплайн Кэтмулла-Рома представляет собой вариант формы сплайна Кэтмулла-Рома , первоначально сформулированный Эдвином Кэтмаллом и Рафаэлем Ромом . [ 1 ] который можно оценить с помощью рекурсивного алгоритма, предложенного Барри и Голдманом. [ 2 ] Это тип интерполяционного сплайна (кривая, проходящая через контрольные точки), определяемого четырьмя контрольными точками. , с кривой, проведенной только из к .




Определение
[ редактировать ]
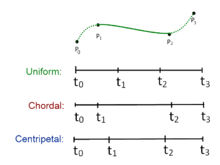
Позволять обозначить точку. Для сегмента кривой определяется точками и последовательность узлов , центростремительный сплайн Катмулла – Рома может быть получен следующим образом:
![{\displaystyle \mathbf {P} _{i}=[x_{i}\quad y_{i}]^{T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/94b787f14d85118f4669426adc26edc700fc97e7)



где





и
![{\displaystyle t_{i+1}=\left[{\sqrt {(x_{i+1}-x_{i})^{2}+(y_{i+1}-y_{i})^{ 2}}}\right]^{\alpha }+t_{i}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3fbc45aa0c46308c07c445d0e1359cafca90a17)
в котором варьируется от 0 до 1 для параметризации узла и с . Для центростремительного сплайна Катмулла–Рома значение является . Когда , результирующая кривая представляет собой стандартный равномерный сплайн Катмулла–Рома ; когда , результатом является хордальный сплайн Катмулла–Рома .







Затыкание в сплайн-уравнения и показывает, что значение сплайновой кривой при является . Аналогично, подставив в сплайн-уравнения показывает, что в . Это верно независимо от значения поскольку уравнение для не требуется для расчета стоимости в точках и .









Расширение до 3D-точек просто достигается путем рассмотрения обычная 3D-точка и
![{\displaystyle \mathbf {P} _{i}=[x_{i}\quad y_{i}\quad z_{i}]^{T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/34f8d209346f24c717009326402cc571a17b77b4)

![{\displaystyle t_{i+1}=\left[{\sqrt {(x_{i+1}-x_{i})^{2}+(y_{i+1}-y_{i})^{ 2}+(z_{i+1}-z_{i})^{2}}}\right]^{\alpha }+t_{i}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4324aa06aa4fecb4a093c1fc499d931ecee8040f)
Преимущества
[ редактировать ]Центростремительный сплайн Катмулла-Рома обладает несколькими желательными математическими свойствами по сравнению с исходной и другими типами формулировок Кэтмулла-Рома. [ 3 ] Во-первых, внутри сегмента кривой не будет образовываться петля или самопересечение. Во-вторых, перегиб никогда не возникает внутри сегмента кривой. В-третьих, он более плотно следует за контрольными точками. [ 4 ] [ нечеткий ]

Другое использование
[ редактировать ]В компьютерном зрении центростремительный сплайн Катмулла-Рома использовался для формулирования активной модели сегментации. Этот метод называется активной сплайновой моделью . [ 5 ] Модель разработана на основе модели активной формы , но использует центростремительный сплайн Катмулла-Рома для соединения двух последовательных точек (модель активной формы использует простую прямую линию), так что общее количество точек, необходимых для изображения формы, меньше. Использование центростремительного сплайна Катмулла-Рома значительно упрощает обучение модели формы и позволяет лучше редактировать контур после сегментации.
Пример кода на Python
[ редактировать ]Ниже приведена реализация сплайна Catmull-Rom в Python , которая создает график, показанный ниже.
import numpy
import matplotlib.pyplot as plt
QUADRUPLE_SIZE: int = 4
def num_segments(point_chain: tuple) -> int:
# There is 1 segment per 4 points, so we must subtract 3 from the number of points
return len(point_chain) - (QUADRUPLE_SIZE - 1)
def flatten(list_of_lists) -> list:
# E.g. mapping [[1, 2], [3], [4, 5]] to [1, 2, 3, 4, 5]
return [elem for lst in list_of_lists for elem in lst]
def catmull_rom_spline(
P0: tuple,
P1: tuple,
P2: tuple,
P3: tuple,
num_points: int,
alpha: float = 0.5,
):
"""
Compute the points in the spline segment
:param P0, P1, P2, and P3: The (x,y) point pairs that define the Catmull-Rom spline
:param num_points: The number of points to include in the resulting curve segment
:param alpha: 0.5 for the centripetal spline, 0.0 for the uniform spline, 1.0 for the chordal spline.
:return: The points
"""
# Calculate t0 to t4. Then only calculate points between P1 and P2.
# Reshape linspace so that we can multiply by the points P0 to P3
# and get a point for each value of t.
def tj(ti: float, pi: tuple, pj: tuple) -> float:
xi, yi = pi
xj, yj = pj
dx, dy = xj - xi, yj - yi
l = (dx ** 2 + dy ** 2) ** 0.5
return ti + l ** alpha
t0: float = 0.0
t1: float = tj(t0, P0, P1)
t2: float = tj(t1, P1, P2)
t3: float = tj(t2, P2, P3)
t = numpy.linspace(t1, t2, num_points).reshape(num_points, 1)
A1 = (t1 - t) / (t1 - t0) * P0 + (t - t0) / (t1 - t0) * P1
A2 = (t2 - t) / (t2 - t1) * P1 + (t - t1) / (t2 - t1) * P2
A3 = (t3 - t) / (t3 - t2) * P2 + (t - t2) / (t3 - t2) * P3
B1 = (t2 - t) / (t2 - t0) * A1 + (t - t0) / (t2 - t0) * A2
B2 = (t3 - t) / (t3 - t1) * A2 + (t - t1) / (t3 - t1) * A3
points = (t2 - t) / (t2 - t1) * B1 + (t - t1) / (t2 - t1) * B2
return points
def catmull_rom_chain(points: tuple, num_points: int) -> list:
"""
Calculate Catmull-Rom for a sequence of initial points and return the combined curve.
:param points: Base points from which the quadruples for the algorithm are taken
:param num_points: The number of points to include in each curve segment
:return: The chain of all points (points of all segments)
"""
point_quadruples = ( # Prepare function inputs
(points[idx_segment_start + d] for d in range(QUADRUPLE_SIZE))
for idx_segment_start in range(num_segments(points))
)
all_splines = (catmull_rom_spline(*pq, num_points) for pq in point_quadruples)
return flatten(all_splines)
if __name__ == "__main__":
POINTS: tuple = ((0, 1.5), (2, 2), (3, 1), (4, 0.5), (5, 1), (6, 2), (7, 3)) # Red points
NUM_POINTS: int = 100 # Density of blue chain points between two red points
chain_points: list = catmull_rom_chain(POINTS, NUM_POINTS)
assert len(chain_points) == num_segments(POINTS) * NUM_POINTS # 400 blue points for this example
plt.plot(*zip(*chain_points), c="blue")
plt.plot(*zip(*POINTS), c="red", linestyle="none", marker="o")
plt.show()

Пример кода в Unity C#
[ редактировать ]using UnityEngine;
// a single catmull-rom curve
public struct CatmullRomCurve
{
public Vector2 p0, p1, p2, p3;
public float alpha;
public CatmullRomCurve(Vector2 p0, Vector2 p1, Vector2 p2, Vector2 p3, float alpha)
{
(this.p0, this.p1, this.p2, this.p3) = (p0, p1, p2, p3);
this.alpha = alpha;
}
// Evaluates a point at the given t-value from 0 to 1
public Vector2 GetPoint(float t)
{
// calculate knots
const float k0 = 0;
float k1 = GetKnotInterval(p0, p1);
float k2 = GetKnotInterval(p1, p2) + k1;
float k3 = GetKnotInterval(p2, p3) + k2;
// evaluate the point
float u = Mathf.LerpUnclamped(k1, k2, t);
Vector2 A1 = Remap(k0, k1, p0, p1, u);
Vector2 A2 = Remap(k1, k2, p1, p2, u);
Vector2 A3 = Remap(k2, k3, p2, p3, u);
Vector2 B1 = Remap(k0, k2, A1, A2, u);
Vector2 B2 = Remap(k1, k3, A2, A3, u);
return Remap(k1, k2, B1, B2, u);
}
static Vector2 Remap(float a, float b, Vector2 c, Vector2 d, float u)
{
return Vector2.LerpUnclamped(c, d, (u - a) / (b - a));
}
float GetKnotInterval(Vector2 a, Vector2 b)
{
return Mathf.Pow(Vector2.SqrMagnitude(a - b), 0.5f * alpha);
}
}
using UnityEngine;
// Draws a catmull-rom spline in the scene view,
// along the child objects of the transform of this component
public class CatmullRomSpline : MonoBehaviour
{
[Range(0, 1)]
public float alpha = 0.5f;
int PointCount => transform.childCount;
int SegmentCount => PointCount - 3;
Vector2 GetPoint(int i) => transform.GetChild(i).position;
CatmullRomCurve GetCurve(int i)
{
return new CatmullRomCurve(GetPoint(i), GetPoint(i+1), GetPoint(i+2), GetPoint(i+3), alpha);
}
void OnDrawGizmos()
{
for (int i = 0; i < SegmentCount; i++)
DrawCurveSegment(GetCurve(i));
}
void DrawCurveSegment(CatmullRomCurve curve)
{
const int detail = 32;
Vector2 prev = curve.p1;
for (int i = 1; i < detail; i++)
{
float t = i / (detail - 1f);
Vector2 pt = curve.GetPoint(t);
Gizmos.DrawLine(prev, pt);
prev = pt;
}
}
}
Пример кода в Unreal C++
[ редактировать ]float GetT( float t, float alpha, const FVector& p0, const FVector& p1 )
{
auto d = p1 - p0;
float a = d | d; // Dot product
float b = FMath::Pow( a, alpha*.5f );
return (b + t);
}
FVector CatmullRom( const FVector& p0, const FVector& p1, const FVector& p2, const FVector& p3, float t /* between 0 and 1 */, float alpha=.5f /* between 0 and 1 */ )
{
float t0 = 0.0f;
float t1 = GetT( t0, alpha, p0, p1 );
float t2 = GetT( t1, alpha, p1, p2 );
float t3 = GetT( t2, alpha, p2, p3 );
t = FMath::Lerp( t1, t2, t );
FVector A1 = ( t1-t )/( t1-t0 )*p0 + ( t-t0 )/( t1-t0 )*p1;
FVector A2 = ( t2-t )/( t2-t1 )*p1 + ( t-t1 )/( t2-t1 )*p2;
FVector A3 = ( t3-t )/( t3-t2 )*p2 + ( t-t2 )/( t3-t2 )*p3;
FVector B1 = ( t2-t )/( t2-t0 )*A1 + ( t-t0 )/( t2-t0 )*A2;
FVector B2 = ( t3-t )/( t3-t1 )*A2 + ( t-t1 )/( t3-t1 )*A3;
FVector C = ( t2-t )/( t2-t1 )*B1 + ( t-t1 )/( t2-t1 )*B2;
return C;
}
См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ Кэтмалл, Эдвин ; Ром, Рафаэль (1974). «Класс локальных интерполирующих сплайнов». В Барнхилле, Роберт Э.; Ризенфельд, Ричард Ф. (ред.). Компьютерное геометрическое проектирование . стр. 317–326. дои : 10.1016/B978-0-12-079050-0.50020-5 . ISBN 978-0-12-079050-0 .
- ^ Барри, Филипп Дж.; Гольдман, Рональд Н. (август 1988 г.). Рекурсивный алгоритм вычисления для класса сплайнов Катмулла–Рома . Материалы 15-й ежегодной конференции по компьютерной графике и интерактивным технологиям, SIGGRAPH, 1988. Vol. 22. Ассоциация вычислительной техники . стр. 199–204. дои : 10.1145/378456.378511 .
- ^ Юксель, Цем; Шефер, Скотт; Кейзер, Джон (июль 2011 г.). «Параметризация и приложения кривых Катмулла-Рома» . Компьютерное проектирование . 43 (7): 747–755. CiteSeerX 10.1.1.359.9148 . дои : 10.1016/j.cad.2010.08.008 .
- ^ Юксель; Шефер; Кейзер, Джем; Скотт; Джон. «О параметризации кривых Кэтмулла-Рома» (PDF) .
{{cite web}}: CS1 maint: несколько имен: список авторов ( ссылка ) - ^ Джен Хонг, Тан; Ачарья, У. Раджендра (2014). «Активная сплайновая модель: интерактивная сегментация на основе формы» (PDF) . Цифровая обработка сигналов . 35 : 64–74. arXiv : 1402.6387 . дои : 10.1016/j.dsp.2014.09.002 . S2CID 6953844 .
Внешние ссылки
[ редактировать ]- Кривая Катмулла-Рома без точек возврата и самопересечений – реализация на Java
- Кривая Катмулла-Рома без точек пересечения и самопересечений – упрощенная реализация на C++
- Сплайны Catmull-Rom — интерактивная генерация с помощью Python в блокноте Jupyter
- Сглаживание путей с использованием сплайнов Catmull-Rom — еще одна универсальная реализация на C++, включая центростремительные сплайны CR.