Брукс - Алгоритм Брукса
Алгоритм Брукса -Ийенгара или алгоритм фусекпа или гибридный алгоритм Брукса - Иенгара [ 1 ] является распределенным алгоритмом , который повышает как точность, так и точность интервальных измерений, сделанных распределенной датчикой сетью , даже в присутствии неисправных датчиков. [ 2 ] Сенсорная сеть делает это, обменивая измеренное значение и значение точности на каждом узле с любым другим узлом, и вычисляет диапазон точности и измеренное значение для всей сети со всех собранных значений. Даже если некоторые данные от некоторых датчиков неверны, сенсорная сеть не будет неисправна. Алгоритм является неисправным и распределенным. Это также может быть использовано в качестве метода слияния датчика. Точность и точность, связанная с этим алгоритмом, была доказана в 2016 году. [ 3 ]
Фон
[ редактировать ]Брукса - Иенгара Гибридный алгоритм для распределенного контроля в присутствии шумных данных объединяет византийское согласие с слиянием датчика . Это соединяет зазор между слиянием датчика и византийской толерантностью разлома. [ 4 ] Этот основополагающий алгоритм объединил эти разрозненные поля впервые. По сути, он сочетает в себе Долев [ 5 ] Алгоритм приблизительного согласия с Алгоритмом быстрого конвергенции Махани и Шнайдера (FCA). Алгоритм предполагает элементы обработки ( PE ), T из которых неисправны и могут вести себя злонамеренно. Он принимает в качестве входных значений либо реальных значений с неотъемлемой неточности, либо шумом (что может быть неизвестно), либо реальным значением с определенной неопределенностью Apriori или интервалом. Вывод алгоритма является реальным значением с явной точности. Алгоритм работает в O ( n log n ) , где n - количество PES. Можно изменить этот алгоритм, чтобы соответствовать алгоритму конвергенции крестоносца (CCA), [ 6 ] Тем не менее, требование пропускной способности также увеличится. Алгоритм имеет приложения для распределенного управления , надежности программного обеспечения , высокопроизводительных вычислений и т. Д. [ 7 ]
Алгоритм
[ редактировать ]Алгоритм Brooks -Iyengar выполняется в каждом элементе обработки (PE) распределенной сенсорной сети. Каждый PE обменивает свой измеренный интервал со всеми другими PE в сети. Измерение «плавленого» - это средневзвешенное средние точки обнаруженных областей. [ 8 ] В этом разделе показаны бетонные ступени алгоритма Брукса - Иенгара. Каждый PE выполняет алгоритм отдельно:
Вход:
Измерение, отправленное PE K To PE I, является закрытым интервалом ,
![{\ displayStyle [l_ {k, i}, h_ {k, i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1bdd207089aac564b9ddf02e283e0b54c179a336)

Выход:
Выход PE I включает в себя точечную оценку и интервальную оценку
- PE I получает измерения от всех остальных PES.
- Разделите объединение собранных измерений на взаимно исключительные интервалы на основе количества пересекающихся измерений, которые известны как вес интервала.
- Удалить интервалы с весом меньше, чем , где это количество неисправно
- Если остались интервалы L , пусть Обозначите набор оставшихся интервалов. У нас есть , где интервал и вес, связанный с интервалом Полем Мы также предполагаем .
- Рассчитайте оценку точки из Pe i как И оценка интервала




![{\ displayStyle i_ {l}^{i} = [l_ {i_ {l}^{i}}, h_ {i_ {l}^{i}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a0d9d7d4334b43abe9910fac26f4c51326e18086)





![{\ displayStyle [l_ {i_ {1}^{i}}, h_ {i_ {l}^{i}}]}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f33cbf9b12ba1b55366888a8554ca7aed6fd5e5b)
Пример:
Рассмотрим пример 5 PE, в котором PE 5 ( ) отправляет неправильные значения другим PES, и все они обмениваются значениями.


Значения, полученные в следующей таблице.

| ценности |



![{\ DisplayStyle [2.7,6.7]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cc082c8d1124565970c95c32080ef875b635edfd)
![{\ DisplayStyle [0.3.2]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/12d3dfa4bf1326e41682e271580ce13cdf905024)
![{\ DisplayStyle [1,5,4,5]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a1252e11c8e9dad706c264ff9a7f2fdb19f35c0e)
![{\ DisplayStyle [0,8,2,8]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/649a5d6da7327c464a36ba9ff300cc4672303ef2)
![{\ DisplayStyle [1.4.4.6]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5cddd3d1e6a7f98d8e90776ded5e83959f6471b7)
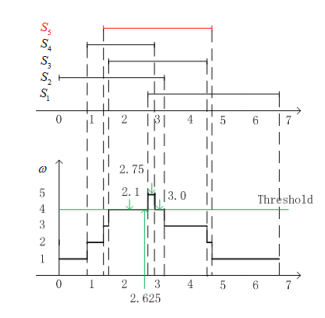
Мы проводим взвешенную область диаграммы (WRD) этих интервалов, затем мы можем определить Для PE 1 в соответствии с алгоритмом:

![{\ DisplayStyle A_ {1} = \ {([1,5,2,7], 4), ([2,7,2,8], 5), ([2,8,3,2], 4) \}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/58b4d0f0f1a1366b3147818d04c7437eafea350a)
который состоит из интервалов, где не менее 4 (= = 5–1) измерения пересекаются. Вывод PE 1 равен

И оценка интервала
![{\ DisplayStyle [1,5,3,2]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/22ffab057d8d796da4de7ab039824f9737badbde)
Аналогично, мы могли бы получить все входные данные и результаты 5 PE:
| НА | Входные интервалы | Оценка выходного интервала | Оценка выходной точки |
|---|---|---|---|
| 2.625 | |||
| 2.4 | |||
| 2.625 | |||
| 2.375 | |||
| —— | —— |
![{\ DisplayStyle [2,7,6,7], [0,3,2], [1.5.4.5], [0,8,2,8], [1.4.4.6]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/01544f01652e45cd309e7f66e6d17938fa4fa199)
![{\ DisplayStyle [2,7,6,7], [0,3,2], [1,5,4,5], [0,8,2,8], [-0,6,2,6]}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9a02d327ff648c8a9f06220c5c2354c02df12826)
![{\ DisplayStyle [1,5,2,8]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ff3d8f21051eaf5ad0c00426e4ba9e5d42aee232)
![{\ DisplayStyle [2,7,6,7], [0,3,2], [1.5.4.5], [0,8,2,8], [0,9,4,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e84b7f03bef702b140d0f58a280aad85b988ba7d)
![{\ DisplayStyle [2,7,6,7], [0,3,2], [1.5.4.5], [0,8,2,8], [-0,7,2,5]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a5a87c09f945e66b3128d17348a9e24baaa89f67)
![{\ displayStyle [2,7,6,7], [0,3,2], [1,5,4,5], [0,8,2,8], [{\ text {-}}, {\ text {-}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e01f63e33426920c2832c920cdb884f00c8c60f6)
Связанные алгоритмы
[ редактировать ]
1982 Византийская проблема: [ 5 ] Византийская общая проблема [ 9 ] В качестве расширения проблемы двух генералов можно рассматривать как бинарную проблему.
1983 Приблизительное согласие: [ 10 ] Метод удаляет некоторые значения из набора состоит из скаляров до толерантных неисправных входов.
1985 г. в эксплуатации: [ 7 ] Метод также использует скаляр в качестве входа.
1996 Алгоритм Брукса-Ийенгара: [ 1 ] Метод основан на интервалах.
2013 Византийский векторный консенсус: [ 11 ] Метод использует векторы в качестве входа.
2013 многомерное соглашение: [ 12 ] Метод также использует векторы в качестве входа, в то время как мера расстояния отличается.
Мы могли бы использовать приблизительный консенсус (на основе скаляр), алгоритм Brooks-Iyengar (на основе интервала) и византийский векторный консенсус (на основе вектора) для работы с интервалы и бумагой [ 3 ] Доказал, что алгоритм Брукса - Иенгара здесь лучший.
Приложение
[ редактировать ]Алгоритм Brooks - Iyengar - это основополагающая работа и основная веха в распределенном зондировании, и он может использоваться в качестве устойчивого к разлому решения для многих сценариев избыточности. [ 13 ] Кроме того, его легко внедрить и внедрять в любые сетевые системы. [ 14 ]
В 1996 году алгоритм использовался в Minix для обеспечения большей точности и точности, что приводит к разработке первой версии RT-Linux.
В 2000 году алгоритм также был центральным в программе распределенного отслеживания программы DARPA Sensit. Акустические, сейсмические показания и показания обнаружения движения от нескольких датчиков объединяются и подаются в распределенную систему отслеживания. Кроме того, он использовался для комбинирования гетерогенных подачи датчиков в приложении, выставленном BBN Technologies, BAE Systems, Penn State Applied Research Lab (ARL) и USC/ISI.
Thales Group, производитель обороны Великобритании, использовал эту работу в своей глобальной лаборатории оперативного анализа. Он применяется к программам Raytheon, когда многие системы должны извлечь надежные данные из ненадежной сенсорной сети, что освобождает от растущих инвестиций в повышение надежности датчиков. Кроме того, исследование в разработке этого алгоритма приводит к инструментам, используемым ВМС США в его программном обеспечении осведомленности о морской области.
В образовании алгоритм Брукса - Иенгара широко использовался в таких занятиях, как Университет Висконсина, Пердью, Джорджия Тех, Университет Клемсона, Университет Мэриленда и т. Д.
В дополнение к области сенсорной сети, другие поля, такие как архитектура, вызванная временем, безопасность киберфизических систем, слияние данных, конвергенция роботов, высокопроизводительные вычислительные вычисления, надежность программного обеспечения/оборудования, обучение ансамбля в системах искусственного интеллекта также может выиграть. из алгоритма Брукса - Ийенгара.
Характеристики алгоритма
[ редактировать ]- Неисправные pes переносят < n /3
- Максимальный неисправный PE <2 н /3
- Сложность = O ( n log n )
- Порядок пропускной способности сети = O ( n )
- Конвергенция = 2 т / н.
- Точность = ограничена подход
- Итераты для точности = часто
- Точность над точности = нет
- Точность над точностью = нет
Смотрите также
[ редактировать ]Награды и признание
[ редактировать ]Изобретатели алгоритма Брукса Айенгара доктора Брукс и доктора С.С. Айенгара получили престижную 25-летнюю награду «Время времени» за его новаторское исследование и высокое влияние алгоритма Брукса-Ийенгара. Исследование с высоким воздействием и то, как эта работа повлияла на многочисленные правительственные программы США и коммерческие продукты.
- Доктор С.С. Айенгар получает награду от профессора Стива Яу, IEEE

- Доктор С.С. Айенгар со своим учеником доктором Бруксом

Ссылки
[ редактировать ]- ^ Подпрыгнуть до: а беременный Ричард Р. Брукс и С. Стюрама Айенгар (июнь 1996 г.). «Надежный распределенный алгоритм вычислений и зондирования» . Компьютер 29 (6): 53–60. doi : 10.1109/2.507632 . ISSN 0018-9162 . Архивировано из оригинала 2010-04-08 . Получено 2010-03-22 .
- ^ Мохаммад Ильяс; Имад Махгуб (28 июля 2004 г.). Справочник по сенсорным сетям: Compact Wireless и Swield Sensing Systems (PDF) . CRC Press . стр. 25–4, 33–2 из 864. ISBN 978-0-8493-1968-6 Полем Архивировано из оригинала (PDF) 27 июня 2010 года . Получено 22 марта 2010 года .
- ^ Подпрыгнуть до: а беременный АО, Бук; Ван, Юнкай; Ю, Лу; Брукс, Ричард Р.; Iyengar, SS (2016-05-01). «На точной границе алгоритмов слияния датчика распределенного устойчивого датчика». ACM Comput. Выживший 49 (1): 5: 1–5: 23. doi : 10.1145/2898984 . ISSN 0360-0300 . S2CID 13760223 .
- ^ Д. Долев (январь 1982). «Византийские генералы поражают снова» (PDF) . J. Алгоритмы . 3 (1): 14–30. doi : 10.1016/0196-6774 (82) 90004-9 . Получено 2010-03-22 .
- ^ Подпрыгнуть до: а беременный Л. Лампорт; Р. Шостак; М. Пиз (июль 1982). «Проблема византийских генералов». Транзакции ACM на языках и системах программирования . 4 (3): 382–401. Citeseerx 10.1.1.64.2312 . doi : 10.1145/357172.357176 . S2CID 55899582 .
- ^ Д. Долев; и др. (Июль 1986). «Достижение приблизительного соглашения в присутствии разломов» (PDF) . Журнал ACM . 33 (3): 499–516. Citeseerx 10.1.1.13.3049 . doi : 10.1145/5925.5931 . ISSN 0004-5411 . S2CID 496234 . Получено 2010-03-23 .
- ^ Подпрыгнуть до: а беременный С. Махани; Ф. Шнайдер (1985). «Неточное соглашение: точность, точность и изящная деградация». Материалы четвертого ежегодного симпозиума ACM по принципам распределенных вычислений - PODC '85 . С. 237–249. Citeseerx 10.1.1.20.6337 . doi : 10.1145/323596.323618 . ISBN 978-0897911689 Полем S2CID 10858879 .
- ^ Сартадж Сахни и Сяохун Сюй (7 сентября 2004 г.). «Алгоритмы для беспроводных сенсорных сетей» (PDF) . Университет Флориды, Гейнсвилл . Получено 2010-03-23 .
- ^ Лампорт, Лесли; Шостак, Роберт; Пиз, Маршалл (1982-07-01). «Проблема византийских генералов». ACM Trans. Программа Ланг Система 4 (3): 382–401. Citeseerx 10.1.1.64.2312 . doi : 10.1145/357172.357176 . ISSN 0164-0925 . S2CID 55899582 .
- ^ Долев, Дэнни; Линч, Нэнси А.; Pinter, Shlomit S.; Старк, Юджин У.; Weihl, William E. (1986-05-01). «Достижение приблизительного соглашения в присутствии разломов». J. Acm . 33 (3): 499–516. Citeseerx 10.1.1.13.3049 . doi : 10.1145/5925.5931 . ISSN 0004-5411 . S2CID 496234 .
- ^ Вайдья, Нитин Х.; Гарг, Виджай К. (2013-01-01). «Византийский векторный консенсус в полных графиках». Материалы симпозиума ACM 2013 года о принципах распределенных вычислений . PODC '13. Нью -Йорк, Нью -Йорк, США: ACM. С. 65–73. Arxiv : 1302.2543 . doi : 10.1145/2484239.2484256 . ISBN 9781450320658 Полем S2CID 5914155 .
- ^ Мендес, Хаммураби; Herlihy, Maurice (2013-01-01). «Многомерное приблизительное соглашение в византийских асинхронных системах». Материалы сорока пятого годового симпозиума ACM по теории вычислений . STOC '13. Нью -Йорк, Нью -Йорк, США: ACM. С. 391–400. doi : 10.1145/2488608.2488657 . ISBN 9781450320290 Полем S2CID 13865698 .
- ^ Кумар, Виджай (2012). «Вычислительные и сжатые оптимизации зондирования для обработки информации в сенсорной сети» . Международный журнал вычислений следующего поколения .
- ^ АО, Бук (июль 2017 г.). «Сильные системы мониторинга штата железнодорожных дверей, применяя алгоритм зондирования Brooks-Iyengar к транспортным приложениям». Международный журнал вычислений следующего поколения . 8 S2CID 13592515 .