Мобильный робот Алиса
Тема этой статьи Википедии может не соответствовать общему правилу по известности . ( август 2022 г. ) |
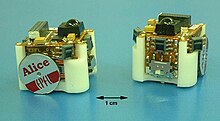
Алиса — это очень маленький мобильный робот «сахарный куб» (2x2x2 см), разработанный в Лаборатории автономных систем (ASL) Федеральной политехнической школы Лозанны в Лозанне , Швейцария, в период с 1998 по 2004 год. Он был частью Института робототехники и интеллектуальных технологий. Systems (IRIS) в Швейцарском федеральном технологическом институте в Цюрихе (ETH Zurich) с 2006 года.
Он был разработан со следующими целями:
- Спроектируйте интеллектуального мобильного робота как можно более дешевого и маленького размера.
- Изучите коллективное поведение большого количества роботов.
- Приобретайте знания в высокоинтегрированной интеллектуальной системе
- Предоставить аппаратную платформу для дальнейших исследований
Технические характеристики
[ редактировать ]Этот раздел может содержать чрезмерное количество сложных деталей, которые могут заинтересовать только определенную аудиторию . В частности, спецификации кажутся скопированными/вставленными . ( Август 2022 г. ) |
Основные характеристики
[ редактировать ]- Размеры: 22 мм х 21 мм х 20 мм.
- Скорость: 40 мм/с
- Потребляемая мощность: 12 - 17 мВт
- Связь: местный ИК 6 см, ИК и радио 10 м
- Автономность питания: до 10 часов
Главный робот
[ редактировать ]- 2 мотора SWATCH с колесами и шинами
- Микроконтроллер PIC16LF877 с флэш-памятью объемом 8 Кслов.
- Пластиковый корпус и гибкая печать со всеми электронными компонентами.
- 4 активных ИК-датчика приближения (измерение отражения)
- NiMH аккумуляторная батарея
- Приемник для дистанционного управления
- 24-контактный разъем для расширения, регулятора напряжения и выключателя питания
Модули расширения
[ редактировать ]- Линейная камера 102 пикселя
- Двунаправленная радиосвязь
- Тактильные датчики
- Zigbee Радиомодуль с поддержкой под управлением TinyOS
Проекты и приложения
[ редактировать ]- 20 роботов на Swiss Expo.02
- РобОнВеб
- Навигация и построение карт
- Футбольный комплект: 2 команды по 3 Алисы играют в футбол на странице А4.
- Расследования коллективного поведения: video.mov 1 и 2
- Роботы-насекомые смешанного общества в рамках европейского LEURRE проекта
- Исследование уровней отбора и родства в развитии сотрудничества в проекте ANTS
Ссылки
[ редактировать ]- Капрари, Дж. Автономные микророботы: приложения и ограничения . Кандидатская диссертация EPFL № 2753 PDF Аннотация
- Лаборатория автономных систем . (ASL) Индекс – Добро пожаловать . ETH Zurich — домашняя страница , заархивированная 25 октября 2012 г. на Wayback Machine
Внешние ссылки
[ редактировать ]- Официальный сайт
- Домашняя страница микроробота Алисы в Лаборатории автономных систем EPFL больше не работает или была перемещена; однако,
- - Роботы-лаборатории автономных систем , где проживают Алиса и другие роботы.
- - Лаборатория автономных систем в EPFL до 2006 г.
- - Лаборатория автономных систем в ETH с 2006 года.
- Совместное покрытие до 30 Алисов
- [1] — Zigbee Радиомодуль с поддержкой под управлением TinyOS.