Прямое преобразование квадратурного нуля
Прямой квадратурный ноль ( DQZ или DQ0 [1] или ДКО , [2] иногда строчные) преобразование или нулевая прямая квадратура [3] ( 0DQ или ODQ , иногда строчные буквы) Преобразование — это тензор , который вращает систему отсчета трехэлементного вектора или трехэлементной матрицы с целью упростить анализ. Преобразование DQZ является продуктом преобразования Кларка и преобразования Парка, впервые предложенного в 1929 году Робертом Х. Парком . [4]
Преобразование DQZ часто используется в электротехнике с трехфазными цепями . Преобразование можно использовать для поворота опорных кадров сигналов переменного тока так, чтобы они стали постоянного тока сигналами . Затем можно выполнить упрощенные расчеты этих величин постоянного тока перед выполнением обратного преобразования для восстановления фактических результатов трехфазного переменного тока. Например, преобразование DQZ часто используется для упрощения анализа трехфазных синхронных машин или для упрощения расчетов по управлению трехфазными инверторами . При анализе трехфазных синхронных машин преобразование переносит трехфазные величины статора и ротора в одну вращающуюся систему отсчета, чтобы устранить влияние изменяющихся во времени индуктивностей и преобразовать систему в линейную, не зависящую от времени систему.
Введение
[ редактировать ]Преобразование DQZ состоит из матриц преобразования Парка и Кларка. Преобразование Кларка (названное в честь Эдит Кларк ) преобразует векторы в системе координат ABC в систему координат XYZ (также называемую αβγ ). Основное значение преобразования Кларка — изолировать ту часть вектора, на который ссылается ABC , которая является общей для всех трех компонентов вектора; он изолирует синфазную составляющую (т. е. компонент Z ). Степенно-инвариантная, правая, равномерно масштабированная матрица преобразования Кларка имеет вид
- .

Чтобы преобразовать вектор-столбец, на который ссылается ABC , в систему координат XYZ , вектор необходимо предварительно умножить на матрицу преобразования Кларка:
- .

А для обратного преобразования из вектора-столбца, на который ссылается XYZ , в систему отсчета ABC , вектор необходимо предварительно умножить на матрицу обратного преобразования Кларка:
- .

Преобразование Парка (названное в честь Роберта Х. Парка ) преобразует векторы в системе координат XYZ в систему координат DQZ . Основное значение преобразования Парка — вращение опорной системы вектора с произвольной частотой. Преобразование Парка сдвигает частотный спектр сигнала так, что произвольная частота теперь отображается как «постоянный ток», а старый постоянный ток отображается как отрицательное значение произвольной частоты. Матрица преобразования Парка
- ,

где θ — мгновенный угол произвольной частоты ω . Чтобы преобразовать вектор, на который ссылается XYZ , в опорный кадр DQZ , сигнал вектора-столбца должен быть предварительно умножен на матрицу преобразования Парка:
- .

И для обратного преобразования из вектора, на который ссылается DQZ , в опорный кадр XYZ , сигнал вектора-столбца должен быть предварительно умножен на обратную матрицу преобразования Парка:
- .

Преобразования Кларка и Парка вместе образуют преобразование DQZ :



Обратное преобразование:

Чтобы преобразовать вектор, на который ссылается ABC , в опорный кадр DQZ , сигнал вектора-столбца должен быть предварительно умножен на матрицу преобразования DQZ:
- .

И для обратного преобразования из вектора, на который ссылается DQZ , в опорный кадр ABC , сигнал вектора-столбца должен быть предварительно умножен на обратную матрицу преобразования DQZ:
- .

Чтобы лучше понять это преобразование, включен вывод преобразования.
Вывод
[ редактировать ]Вывод преобразования Парка
[ редактировать ]Преобразование Парка основано на концепции скалярного произведения и проекции векторов на другие векторы. Сначала представим себе два единичных вектора: и (единичные векторы или оси новой системы отсчета с точки зрения старой системы отсчета) и третий, произвольный вектор . Мы можем определить два единичных вектора и случайный вектор в терминах их декартовых координат в старой системе отсчета:



- ,



где и — единичные базисные векторы старой системы координат и это угол между и единичные векторы (т.е. угол между двумя системами отсчета). Проекция произвольного вектора на каждый из двух новых единичных векторов подразумевает скалярное произведение:



-
-
- .




Так, это проекция на ось, и это проекция на ось. Эти новые векторные компоненты, и , вместе составляем новый вектор , исходный вектор с точки зрения новой системы отсчета DQ .




Обратите внимание, что положительный угол вышеизложенное приводило к повороту произвольного вектора назад при переходе к новой DQ системе отсчета . Другими словами, его угол относительно новой системы отсчета меньше угла к старой системе отсчета. Это связано с тем, что система отсчета, а не вектор, была повернута вперед. Фактически вращение системы отсчета вперед идентично отрицательному вращению вектора. Если старая система отсчета вращалась вперед, например, в трехфазных электрических системах, то результирующий вектор DQ остается стационарным.
Одно матричное уравнение может суммировать описанную выше операцию:
- .

Этот тензор можно расширить до трехмерных задач, где ось, вокруг которой происходит вращение, остается неизменной. В следующем примере вращение происходит вокруг оси Z , но можно было выбрать любую ось:
- .
С точки зрения линейной алгебры это просто вращение по часовой стрелке вокруг оси Z, математически эквивалентное формулам тригонометрического разностного угла .
Вывод преобразования Кларка
[ редактировать ]Единичные базисные векторы ABC
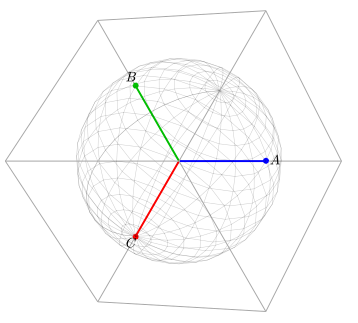
[ редактировать ]Рассмотрим трехмерное пространство с единичными базисными A , B и C. векторами Сфера на рисунке ниже используется для отображения масштаба системы отсчета для контекста, а прямоугольник используется для обеспечения контекста вращения.

Обычно в электротехнике (или в любом другом контексте, где используются трехфазные системы) трехфазные компоненты показаны в двухмерной перспективе. Однако, поскольку три фазы могут изменяться независимо, они по определению ортогональны друг другу. Это подразумевает трехмерную перспективу, как показано на рисунке выше. Итак, двухмерная перспектива на самом деле показывает проекцию трехмерной реальности на плоскость.
Трехфазные проблемы обычно описываются как действующие в этой плоскости. В действительности, проблема, скорее всего, представляет собой проблему сбалансированной фазы (т. е. v A + v B + v C = 0) и чистый вектор

всегда находится в этом плане.
Единичные базисные векторы AYC
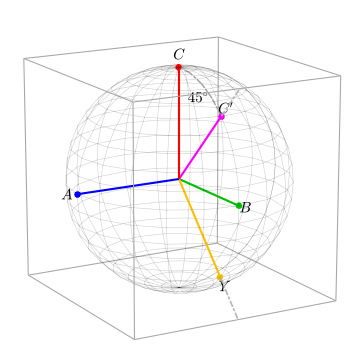
[ редактировать ]Чтобы построить преобразование Кларка, мы фактически используем преобразование Парка в два этапа. Наша цель — повернуть ось C в угол коробки. Таким образом, повернутая ось C будет ортогональна плоскости двумерной перспективы, упомянутой выше. Первый шаг к построению преобразования Кларка требует вращения системы отсчета ABC вокруг A. оси Итак, на этот раз 1 будет в первом элементе преобразования Park:


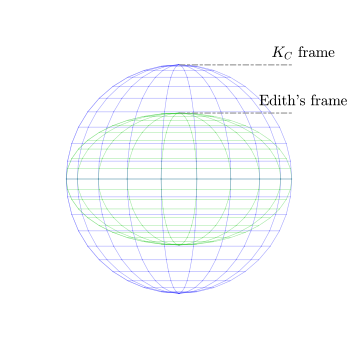
На следующем рисунке показано, как опорный кадр ABC поворачивается к опорному кадру AYC', когда любой вектор предварительно умножается на матрицу K 1 . Оси C' и Y теперь указывают на середины ребер прямоугольника, но величина системы отсчета не изменилась (т. е. сфера не увеличилась и не уменьшилась). Это связано с тем, что норма тензор К 1 равен 1: || К 1 || = 1. Это означает, что любой вектор в системе отсчета ABC будет продолжать иметь ту же величину при повороте в систему отсчета AYC' .
Единичные базисные векторы XYZ
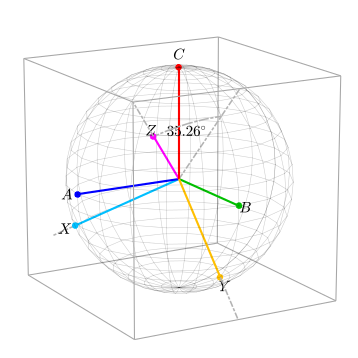
[ редактировать ]Затем следующий тензор вращает вектор вокруг новой оси Y против часовой стрелки относительно оси Y (угол был выбран так, чтобы ось C' была направлена в сторону угла прямоугольника):
- ,


или
- .

Обратите внимание, что расстояние от центра сферы до середины края коробки составляет √ 2, а расстояние от центра сферы до угла коробки составляет √ 3 . Отсюда и появился угол 35,26°. Угол можно вычислить с помощью скалярного произведения. Позволять — единичный вектор в направлении C' и пусть быть единичным вектором в направлении угла прямоугольника в точке . Потому что где это угол между и у нас есть










Норма матрицы К2 также равна 1, поэтому она также не меняет величину любого вектора, предварительно умноженного на К2 матрицу .
Нулевая плоскость
[ редактировать ]В этот момент ось Z теперь ортогональна плоскости, в которой можно найти любой вектор ABC без синфазной составляющей. Любой сбалансированный векторный сигнал ABC (вектор без синфазного режима) будет перемещаться по этой плоскости. Эту плоскость будем называть нулевой плоскостью и она показана ниже шестиугольным контуром.
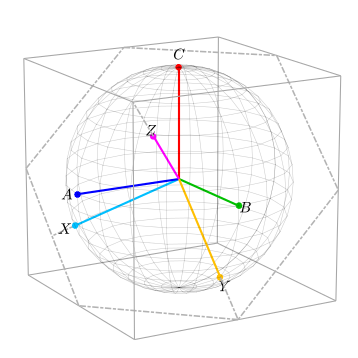
Базисные векторы X и Y находятся в нулевой плоскости. Обратите внимание, что ось X параллельна проекции оси A на нулевую плоскость. Ось X немного больше проекции оси A на нулевую плоскость. Оно больше в √ 3/2 раза . Произвольный вектор не изменил величину в результате этого преобразования из системы отсчета ABC в систему отсчета XYZ (т. е. сфера не изменила размер). Это верно для степенной инвариантной формы преобразования Кларка. На следующем рисунке показана общая двумерная перспектива ABC и XYZ систем отсчета .

Может показаться странным, что, хотя величина вектора не изменилась, величина его компонентов изменилась (т. е. компоненты X и Y длиннее, чем компоненты A , B и C ). Возможно, это можно интуитивно понять, если учесть, что для вектора без синфазного режима, для выражения которого требовалось три значения ( компоненты A , B и C ), теперь требуется только 2 ( компоненты X и Y ), поскольку компонент Z равен нулю. Следовательно, для компенсации значения компонентов X и Y должны быть больше.
Комбинация тензоров
[ редактировать ]Степенно-инвариантная матрица преобразования Кларка представляет собой комбинацию тензоров K 1 и K 2 :
- ,

или
-
- .

Обратите внимание, что при умножении нижняя строка матрицы K C равна 1/ √ 3 , а не 1/3. (Эдит Кларк использовала 1/3 для случая степенного варианта.) Компонент Z не является в точности средним значением A , B и C. компонентов Если бы только элементы нижней строки были изменены на 1/3, то сфера была бы сжата по Z. оси Это означает, что компонент Z не будет иметь такого же масштаба, как X и Y. компоненты
Как написано выше, норма матрицы преобразования Кларка по-прежнему равна 1, что означает, что она только вращает вектор ABC , но не масштабирует его. Чего нельзя сказать об исходном преобразовании Кларка.
Легко проверить (путем умножения матриц), что обратным к K C является

Вариант мощности
[ редактировать ]Иногда желательно масштабировать матрицу преобразования Кларка так, чтобы ось X была проекцией оси A на нулевую плоскость. Для этого мы равномерно применяем масштабный коэффициент √ 2/3 и 2 √ 1/радикал [ почему? ] к нулевому компоненту, чтобы получить степенную матрицу преобразования Кларка:


или
- .

Это обязательно уменьшит сферу в √ 2/3 раза , как показано ниже. Обратите внимание, что эта новая ось X является в точности проекцией оси A на нулевую плоскость.

При степенном преобразовании Кларка величина произвольного вектора меньше в системе отсчета XYZ , чем в системе отсчета ABC (норма преобразования равна √ 2/3 ), но величины отдельных компонентов вектора равны то же (при отсутствии общего режима). Итак, например, сигнал, определяемый формулой

становится в XYZ системе отсчета
- ,

новый вектор, компоненты которого имеют ту же величину, что и исходные компоненты: 1. Во многих случаях это выгодное качество степенного преобразования Кларка.
Преобразование DQZ
[ редактировать ]Преобразование DQZ использует преобразование Кларка для преобразования векторов, на которые ссылается ABC, в два компонента дифференциального режима (т. е. X и Y ) и один компонент синфазного режима (т. е. Z ), а затем применяет преобразование Парка для вращения системы отсчета вокруг системы координат. Ось Z под некоторым заданным углом. Компонент X становится компонентом D , который находится на прямой линии с вектором вращения, а компонент Y становится компонентом Q , который находится под квадратурным углом к прямому компоненту. Преобразование DQZ
-
- .
Пример
[ редактировать ]В электрических системах очень часто значения A , B и C колеблются таким образом, что вектор цепи вращается. В сбалансированной системе вектор вращается вокруг Z. оси Очень часто бывает полезно повернуть систему отсчета так, чтобы большая часть изменений значений abc, вызванных этим вращением, была нейтрализована и любые более мелкие изменения стали более очевидными. Это невероятно полезно, поскольку теперь преобразует систему в линейную, не зависящую от времени систему.
Преобразование DQZ можно рассматривать в геометрических терминах как проекцию трех отдельных синусоидальных фазовых величин на две оси, вращающиеся с той же угловой скоростью, что и синусоидальные фазовые величины.

Выше показано преобразование DQZ применительно к статору синхронной машины. Имеется три обмотки, разделенные 120 физическими градусами. Трехфазные токи равны по величине и отделены друг от друга на 120 электрических градусов. Трехфазные токи отстают от соответствующих фазных напряжений на . Оси DQ показаны вращающимися с угловой скоростью, равной , та же угловая скорость, что и фазные напряжения и токи. Ось D образует угол с обмоткой фазы А, выбранной в качестве опорной. Токи и являются постоянными величинами постоянного тока.





Сравнение с другими преобразованиями
[ редактировать ]Преобразование Парка
[ редактировать ]Преобразование, первоначально предложенное Паком, несколько отличается от приведенного выше. В преобразовании Парка ось q опережает ось d, qd0, а Угол — это угол между фазой a и осью q, как указано ниже:

и

Д. Холмс и Т. Липо, Широтно-импульсная модуляция для преобразователей мощности: принципы и практика, Wiley-IEEE Press, 2003, и
П. Краузе, О. Васинчук и С. Судхофф, Анализ электрических машин и систем привода, 2-е изд., Пискатауэй, Нью-Джерси: IEEE Press, 2002.
среднее преобразование
[ редактировать ]Преобразование dqo концептуально похоже на преобразование αβγ . В то время как преобразование dqo представляет собой проекцию фазовых величин на вращающуюся двухосную систему отсчета, преобразование αβγ можно рассматривать как проекцию фазовых величин на неподвижную двухосную систему отсчета.
Ссылки
[ редактировать ]- Встроенные ссылки
- ^ «Выполнить преобразование трехфазного (abc) сигнала во вращающуюся систему отсчета dq0 или наоборот» . Симулинк . 27 сентября 2018 г. Проверено 11 января 2019 г.
- ^ Михайлович, Зоран (26 июня 1998 г.). «Моделирование и проектирование систем привода PMSM с регулируемым питанием и активной нагрузкой» (PDF) . ЭТД . Проверено 11 января 2019 г.
- ^ Камалаканнан, К.; Суреш, LP; Даш, СС; Паниграхи, БК (2014). Силовая электроника и системы возобновляемой энергетики: материалы ICPERES 2014 . Конспект лекций по электротехнике. Спрингер Индия. п. 1029. ИСБН 978-81-322-2119-7 . Проверено 11 января 2019 г.
- ^ Р. Х. Парк Теория двух реакций синхронных машин AIEE Transactions 48: 716–730 (1929).
- Общие ссылки
- С.Дж. О'Рурк и др. «Геометрическая интерпретация систем отсчета и преобразований: dq0, Кларк и Парк», в IEEE Transactions on Energy Conversion, vol. 34, нет. 4, стр. 2070–2083, декабрь 2019 г.
- Дж. Льюис Блэкберн «Симметричные компоненты для проектирования энергетических систем» , Марсель Деккер, Нью-Йорк (1993). ISBN 0-8247-8767-6
- Чжан и др. Трехфазный инвертор с нейтральной ветвью и пространственной векторной модуляцией. Протоколы конференции IEEE APEC '97 (1997).
- ТАЛипо, «Декартово-векторный подход к эталонной теории машин переменного тока», Int. Конференция по электрическим машинам, Лоссан, 18–24 сентября 1984 г.
