Алгоритм сопоставления блоков
Алгоритм сопоставления блоков — это способ поиска совпадающих макроблоков в последовательности цифровых видеокадров для целей оценки движения . В основе оценки движения лежит предположение, что шаблоны, соответствующие объектам и фону в кадре видеопоследовательности, перемещаются внутри кадра, образуя соответствующие объекты в последующем кадре. Это можно использовать для обнаружения временной избыточности в видеопоследовательности, повышая эффективность межкадрового сжатия видео путем определения содержимого макроблока со ссылкой на содержимое известного макроблока, которое минимально отличается.
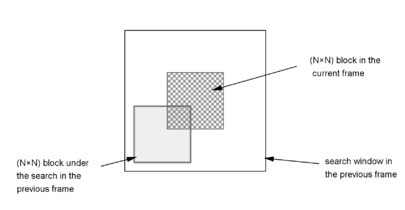
Алгоритм сопоставления блоков предполагает разделение текущего кадра видео на макроблоки и сравнение каждого из макроблоков с соответствующим блоком и соседними с ним соседями в соседнем кадре видео (иногда только с предыдущим). Создается вектор , моделирующий перемещение макроблока из одного места в другое. Это движение, рассчитанное для всех макроблоков, составляющих кадр, представляет собой движение, оцененное в кадре.
Область поиска для хорошего соответствия макроблока определяется «параметром поиска» p, где p — количество пикселей на всех четырех сторонах соответствующего макроблока в предыдущем кадре. Параметр поиска — это мера движения. Чем больше значение p, тем больше потенциальное движение и вероятность найти хорошее совпадение. Однако полный поиск всех потенциальных блоков является вычислительно дорогостоящей задачей. Типичные входные данные — это макроблок размером 16 пикселей и область поиска p = 7 пикселей.
Сопоставление блоков и 3D-фильтрация используют этот подход для решения различных восстановления изображений, обратных задач таких как уменьшение шума. [1] и устранение размытия [2] как в неподвижных изображениях, так и в цифровом видео .
Мотивация
[ редактировать ]Оценка движения — это процесс определения векторов движения , которые описывают преобразование одного 2D-изображения в другое; обычно из соседних кадров видеопоследовательности. Векторы движения могут относиться ко всему изображению (глобальная оценка движения) или к конкретным частям, таким как прямоугольные блоки, участки произвольной формы или даже к каждому пикселю. Векторы движения могут быть представлены поступательной моделью или многими другими моделями, которые могут аппроксимировать движение реальной видеокамеры, например вращение и перемещение во всех трех измерениях и масштабирование.
Применение векторов движения к изображению для прогнозирования преобразования в другое изображение из-за перемещения камеры или объекта на изображении называется компенсацией движения . Комбинация оценки движения и компенсации движения является ключевой частью сжатия видео , используемого в MPEG 1, 2 и 4, а также во многих других видеокодеках .
Сжатие видео на основе оценки движения помогает сэкономить биты за счет отправки закодированных разностных изображений, которые по своей природе имеют меньшую энтропию, в отличие от отправки полностью закодированного кадра. Однако наиболее вычислительно затратной и ресурсоемкой операцией во всем процессе сжатия является оценка движения. Следовательно, для сжатия видео необходимы быстрые и недорогие в вычислительном отношении алгоритмы оценки движения.
Метрики оценки
[ редактировать ]Метрика сопоставления макроблока с другим блоком основана на функции стоимости. Наиболее популярными с точки зрения вычислительных затрат являются:
Средняя разница или средняя абсолютная разница (MAD) =

Среднеквадратическая ошибка (MSE) =

где N — размер макроблока, а и – это пиксели, сравниваемые в текущем макроблоке и эталонном макроблоке соответственно.


Изображение с компенсацией движения, созданное с использованием векторов движения и макроблоков из опорного кадра, характеризуется пиковым отношением сигнал/шум (PSNR),

Алгоритмы
[ редактировать ]Эта статья нуждается в дополнительных цитатах для проверки . ( январь 2024 г. ) |
Алгоритмы сопоставления блоков исследуются с середины 1980-х годов. Было разработано множество алгоритмов, но ниже описаны лишь некоторые из наиболее основных или часто используемых.
Исчерпывающий поиск
[ редактировать ]Этот алгоритм вычисляет функцию стоимости в каждом возможном месте окна поиска. Это приводит к наилучшему совпадению макроблока в опорном кадре с блоком в другом кадре. Полученное изображение с компенсацией движения имеет самое высокое пиковое соотношение сигнал/шум по сравнению с любым другим алгоритмом сопоставления блоков.Однако это самый вычислительно обширный алгоритм сопоставления блоков среди всех. Большее окно поиска требует большего количества вычислений.
Оптимизированное иерархическое сопоставление блоков (OHBM)
[ редактировать ]Алгоритм оптимизированного иерархического сопоставления блоков (OHBM) ускоряет исчерпывающий поиск на основе оптимизированных пирамид изображений. [3]
Трехшаговый поиск
[ редактировать ]Это один из первых алгоритмов быстрого сопоставления блоков. Он работает следующим образом:
- Начните с поиска местоположения в центре
- Установите размер шага S = 4 и параметр поиска p = 7.
- Найдите 8 локаций +/- S пикселей вокруг локации (0,0) и локации (0,0).
- Выберите среди 9 найденных местоположений то, у которого есть функция минимальной стоимости.
- Установите новый источник поиска в выбранное выше место.
- Установите новый размер шага как S = S/2.
- Повторяйте процедуру поиска до тех пор, пока S = 1.
Результирующее местоположение для S=1 — это местоположение с минимальной функцией стоимости, и макроблок в этом месте является наилучшим соответствием.
В этом алгоритме объем вычислений сокращается в 9 раз. Для p=7, в то время как ES оценивает стоимость для 225 макроблоков, TSS оценивает только для 25 макроблоков.
Двумерный логарифмический поиск
[ редактировать ]TDLS тесно связан с TSS, однако он более точен для оценки векторов движения для большого размера окна поиска. Алгоритм можно описать следующим образом:
- Начните с поиска местоположения в центре
- Выберите начальный размер шага, скажем, S = 8.
- Найдите 4 местоположения на расстоянии S от центра по осям X и Y.
- Найдите местоположение точки с функцией наименьшей стоимости.
- Если точка, отличная от центра, является наилучшей точкой соответствия,
- Выберите эту точку в качестве нового центра
- Если лучшая точка совпадения находится в центре, установите S = S/2.
- Повторите шаги 2–3.
- всех 8 местоположений вокруг центра на расстоянии S. Если S = 1, выполняется поиск
- Установите вектор движения как точку с наименьшей функцией стоимости.
Новый трехэтапный поиск
[ редактировать ]TSS использует единый шаблон проверки и склонен пропускать небольшие движения. НТСС [4] является улучшением по сравнению с TSS, поскольку он обеспечивает схему поиска со смещением по центру и имеет возможность остановки на полпути для снижения вычислительных затрат. Это был один из первых широко распространенных быстрых алгоритмов, который часто использовался для реализации более ранних стандартов, таких как MPEG 1 и H.261.
Алгоритм работает следующим образом:
- Начните с поиска местоположения в центре
- Найдите 8 локаций +/- S пикселей с S = 4 и 8 локаций +/- S пикселей с S = 1 вокруг локации (0,0)
- Выберите среди 16 найденных местоположений то, у которого есть функция минимальной стоимости.
- Если функция минимальной стоимости встречается в начале координат, остановите поиск и установите вектор движения на (0,0).
- Если функция минимальной стоимости встречается в одном из 8 мест при S = 1, установите новое начало поиска в это место.
- Проверьте соседние веса для этого местоположения. В зависимости от местоположения можно проверить либо 3, либо 5 точек.
- Тот, который дает наименьший вес, является наиболее близким, установите вектор движения в это место.
- Если наименьший вес после первого шага был в одном из 8 мест при S = 4, следует обычная процедура TSS.
- Выберите среди 9 найденных местоположений то, у которого есть функция минимальной стоимости.
- Установите новый источник поиска в выбранное выше место.
- Установите новый размер шага как S = S/2.
- Повторяйте процедуру поиска до тех пор, пока S = 1.
Таким образом, этот алгоритм проверяет 17 точек для каждого макроблока, а в худшем случае проверяется 33 местоположения, что все равно намного быстрее, чем TSS.
Простой и эффективный поиск
[ редактировать ]Идея TSS заключается в том, что поверхность ошибок из-за движения в каждом макроблоке является унимодальной . Унимодальная поверхность — это поверхность в форме чаши, у которой веса, генерируемые функцией стоимости, монотонно увеличиваются от глобального минимума. Однако унимодальная поверхность не может иметь два минимума в противоположных направлениях, и, следовательно, 8-точечный поиск по фиксированному шаблону TSS можно дополнительно модифицировать, чтобы включить это и сэкономить вычисления. СЭС [5] является расширением TSS, включающим это предположение.
Алгоритм SES совершенствует алгоритм TSS, поскольку каждый шаг поиска в SES разделен на две фазы:
• Первый этап:
• Divide the area of search in four quadrants • Start search with three locations, one at center (A) and others (B and C), S=4 locations away from A in orthogonal directions • Find points in search quadrant for second phase using the weight distribution for A, B, C: • If (MAD(A)>=MAD(B) and MAD(A)>=MAD(C)), select points in second phase quadrant IV • If (MAD(A)>=MAD(B) and MAD(A)<=MAD(C)), select points in second phase quadrant I • If (MAD(A)<MAD(B) and MAD(A)<MAD(C)), select points in second phase quadrant II • If (MAD(A)<MAD(B) and MAD(A)>=MAD(C)), select points in second phase quadrant III
• Второй этап:
• Find the location with lowest weight • Set the new search origin as the point found above
• Установите новый размер шага как S = S/2.
• Повторяйте процедуру поиска SES до тех пор, пока S=1.
• Выберите место с наименьшим весом в качестве вектора движения.SES в вычислительном отношении очень эффективен по сравнению с TSS. Однако достигаемое пиковое отношение сигнал/шум ниже по сравнению с TSS, поскольку поверхности ошибок в действительности не являются строго унимодальными.
Четырехшаговый поиск
[ редактировать ]Четырехшаговый поиск — это улучшение по сравнению с TSS с точки зрения меньших вычислительных затрат и лучшего пикового соотношения сигнал/шум. Похоже на: НТСС, ФСС [6] также используется поиск со смещением по центру и предусмотрена остановка на полпути.
Алгоритм работает следующим образом:
- Начните с поиска местоположения в центре
- Установить размер шага S = 2 (независимо от параметра поиска p)
- Поиск 8 локаций +/- S пикселей вокруг локации (0,0)
- Выберите среди 9 найденных местоположений то, у которого есть функция минимальной стоимости.
- Если минимальный вес находится в центре окна поиска:
- Установите новый размер шага как S = S/2 (то есть S = 1).
- Повторите процедуру поиска с пунктов 3 по 4.
- Выберите местоположение с наименьшим весом в качестве вектора движения.
- Если минимальный вес обнаружен в одном из 8 мест, кроме центра:
- Установите новое начало координат в этом месте
- Зафиксируйте размер шага как S = 2.
- Повторите процедуру поиска с шагов 3 по 4. В зависимости от местоположения нового источника выполните поиск по 5 или 3 местоположениям.
- Выберите место с наименьшим весом
- Если место с наименьшим весом находится в центре нового окна, перейдите к шагу 5, в противном случае перейдите к шагу 6.
Поиск алмазов
[ редактировать ]Поиск алмазов (DS) [7] Алгоритм использует ромбовидный шаблон поиска точек и работает точно так же, как и 4SS. Однако количество шагов, которые может выполнить алгоритм, не ограничено.
Для поиска используются два разных типа фиксированных шаблонов:
- Шаблон поиска большого ромба (LDSP)
- Схема поиска «маленький ромб» (SDSP)
Алгоритм работает следующим образом:
- ЛДСП:
- Начните с поиска местоположения в центре
- Установить размер шага S = 2
- Найдите 8 пикселей местоположения (X,Y) так, что (|X|+|Y|=S) вокруг местоположения (0,0), используя ромбовидный шаблон поиска точек.
- Выберите среди 9 найденных местоположений то, у которого есть функция минимальной стоимости.
- Если минимальный вес найден в центре окна поиска, перейдите к шагу SDSP.
- Если минимальный вес обнаружен в одном из 8 мест, кроме центра, установите новое начало координат в этом месте.
- Повтор ЛДСП
- СДСП:
- Установите новый источник поиска
- Установите новый размер шага как S = S/2 (то есть S = 1).
- Повторите процедуру поиска, чтобы найти местоположение с наименьшим весом.
- Выберите местоположение с наименьшим весом в качестве вектора движения.
Этот алгоритм очень точно находит глобальный минимум, поскольку шаблон поиска не слишком велик и не слишком мал. Алгоритм алмазного поиска имеет пиковое соотношение сигнал/шум, близкое к таковому у исчерпывающего поиска, при значительно меньших вычислительных затратах.
Адаптивный поиск по образцу дороги
[ редактировать ]Адаптивный поиск по образцу дороги (ARPS) [8] Алгоритм использует тот факт, что общее движение в кадре обычно является когерентным , т.е. если макроблоки вокруг текущего макроблока перемещаются в определенном направлении, то существует высокая вероятность того, что текущий макроблок также будет иметь аналогичный вектор движения. . Этот алгоритм использует вектор движения макроблока, находящегося непосредственно слева от него, для прогнозирования собственного вектора движения.
Адаптивный поиск по образцу трассы работает следующим образом:
- Начните с местоположения поиска в центре (исходное место).
- Найдите прогнозируемый вектор движения для блока
- Установите размер шага S = max (|X|,|Y|), где (X,Y) — координата прогнозируемого вектора движения.
- Поиск точек, распределенных вокруг начала координат с шагом S.
- Установите точку с наименьшим весом в качестве начала координат.
- Поиск с использованием схемы поиска «маленький ромб» (SDSP) вокруг нового источника.
- Повторяйте поиск SDSP до тех пор, пока наименее взвешенная точка не окажется в центре SDSP.
Поиск по шаблону Рода непосредственно помещает поиск в область, где существует высокая вероятность найти хороший совпадающий блок. Основное преимущество ARPS перед DS заключается в том, что если прогнозируемый вектор движения равен (0, 0), он не тратит вычислительное время на выполнение LDSP, а сразу начинает использовать SDSP. Более того, если прогнозируемый вектор движения находится далеко от центра, ARPS снова экономит на вычислениях, напрямую переходя к этой окрестности и используя SDSP, тогда как DS не торопится с выполнением LDSP.
Ссылки
[ редактировать ]- ^ Дабов, Костадин; Фой, Алессандро; Катковник Владимир; Егиазарян, Карен (16 июля 2007 г.). «Подавление шума изображения с помощью разреженной совместной фильтрации в области 3D-преобразования». Транзакции IEEE при обработке изображений . 16 (8): 2080–2095. Бибкод : 2007ITIP...16.2080D . CiteSeerX 10.1.1.219.5398 . дои : 10.1109/TIP.2007.901238 . ПМИД 17688213 . S2CID 1475121 .
- ^ Даниелян, Арам; Катковник Владимир; Егиазарян, Карен (30 июня 2011 г.). «Кадры BM3D и вариационное устранение размытия изображений». Транзакции IEEE при обработке изображений . 21 (4): 1715–28. arXiv : 1106.6180 . Бибкод : 2012ITIP...21.1715D . дои : 10.1109/TIP.2011.2176954 . ПМИД 22128008 . S2CID 11204616 .
- ^ Дже, Чансу; Пак, Хён Мин (2013). «Оптимизированное иерархическое сопоставление блоков для быстрой и точной регистрации изображений». Обработка сигналов: передача изображений . 28 (7): 779–791. дои : 10.1016/j.image.2013.04.002 .
- ^ Ли, Жэньсян; Цзэн, Бинг; Лю, Мин (август 1994 г.). «Новый трехэтапный алгоритм поиска для оценки движения блоков». Транзакции IEEE по схемам и системам видеотехнологий . 4 (4): 438–442. дои : 10.1109/76.313138 .
- ^ Лу, Цзяньхуа; Лю, Мин (апрель 1997 г.). «Простой и эффективный алгоритм поиска для оценки движения с сопоставлением блоков». Транзакции IEEE по схемам и системам видеотехнологий . 7 (2): 429–433. дои : 10.1109/76.564122 .
- ^ По, Лай-Ман; Ма, Вин-Чунг (июнь 1996 г.). «Новый четырехшаговый алгоритм поиска для быстрой оценки движения блоков». Транзакции IEEE по схемам и системам видеотехнологий . 6 (3): 313–317. дои : 10.1109/76.499840 .
- ^ Чжу, Шан; Ма, Кай-Куанг (февраль 2000 г.). «Новый алгоритм поиска алмазов для быстрой оценки движения с сопоставлением блоков». Транзакции IEEE при обработке изображений . 9 (12): 287–290. Бибкод : 2000ITIP....9..287Z . дои : 10.1109/83.821744 . ПМИД 18255398 .
- ^ Не, Яо; Ма, Кай-Куанг (декабрь 2002 г.). «Адаптивный поиск по шаблону Руда для быстрой оценки движения с сопоставлением блоков» (PDF) . Транзакции IEEE при обработке изображений . 11 (12): 1442–1448. Бибкод : 2002ITIP...11.1442N . дои : 10.1109/TIP.2002.806251 . ПМИД 18249712 .