Непрерывное моделирование
Непрерывное моделирование относится к подходам моделирования, при которых система моделируется с помощью переменных, которые непрерывно изменяются в соответствии с набором дифференциальных уравнений . [1] [2]
История
[ редактировать ]Он примечателен тем, что был одним из первых применений компьютеров, начиная с Эниака в 1946 году. Непрерывное моделирование позволяет прогнозировать
- траектории ракет
- динамика водородной бомбы ( обратите внимание: это первое применение Эниака )
- моделирование электрических цепей [3]
- робототехника [4]
(SCS), основанное в 1952 году, Международное общество моделирования и симуляции является некоммерческой корпорацией, управляемой волонтерами и занимающейся продвижением использования моделирования и симуляции для решения реальных проблем. Их первая публикация убедительно свидетельствовала о том, что ВМФ тратит много денег на безрезультатные летные испытания ракет, но что аналоговый компьютер Совета по моделированию может предоставить более точную информацию посредством моделирования полетов. С тех пор непрерывное моделирование оказалось неоценимым в военных и частных проектах со сложными системами. Без этого ни один полет Аполлона на Луну был бы невозможен.
Разъяснение понятий
[ редактировать ]

Различие между непрерывным и дискретным применимо как к реальным динамическим системам, так и к их моделированию.
Динамическая система (реального мира) может быть непрерывной или дискретной. Непрерывные динамические системы (например, физические системы с материальными объектами, движущимися в пространстве) характеризуются переменными состояния, значения которых изменяются непрерывно, в то время как значения переменных состояния дискретных динамических систем (например, экосистем хищник-жертва) «прыгают», т. е. изменяются только с дискретными шагами по времени.
При непрерывном моделировании непрерывно меняющиеся переменные состояния системы моделируются дифференциальными уравнениями. Однако в цифровых вычислениях действительные числа не могут быть точно представлены, а дифференциальные уравнения можно решать только численно с помощью приближенных алгоритмов (таких как метод Эйлера или Рунге-Кутты ) с использованием той или иной формы дискретизации. Следовательно, цифровые компьютеры не могут выполнять действительно непрерывное моделирование. Только аналоговые компьютеры могут выполнять действительно непрерывное моделирование. Однако во многих случаях подходы к цифровым вычислениям, основанные на постепенном прогрессировании времени (с фиксированными или динамически регулируемыми приращениями) для дискретизации времени на небольшие временные шаги, обеспечивают удовлетворительные аппроксимации.
дискретное моделирование событий С другой стороны, изменяет переменные состояния только в ответ на события, обычно используя временную прогрессию следующего события .
Непрерывные динамические системы могут быть охвачены только непрерывной имитационной моделью, в то время как дискретные динамические системы могут быть охвачены либо более абстрактным образом с помощью непрерывной имитационной модели (например, уравнения Лотки-Вольтерра для моделирования экосистемы хищник-жертва), либо более реалистичным способом с помощью модели моделирования дискретных событий (в экосистеме хищник-жертва рождения, смерти и встречи хищник-жертва являются дискретными событиями). При использовании непрерывной имитационной модели дискретной динамической системы популяции животных можно получить такие результаты, как 23,7 животных, которые сначала необходимо округлить, чтобы они имели смысл.
В примере, показанном справа, показаны продажи определенного продукта с течением времени. Использование моделирования дискретных событий требует наличия происходящего события, которое может изменить количество продаж. В отличие от этого, непрерывное моделирование имеет плавный и устойчивый рост количества продаж. [5] Стоит отметить, что продажи — это дискретные события, сопровождающиеся дискретными изменениями состояния. Непрерывное моделирование продаж предполагает возможность частичных продаж, например, 1/3 продажи. По этой причине непрерывное моделирование продаж не позволяет точно моделировать реальность, но, тем не менее, может приблизительно отражать динамику системы.
Концептуальная имитационная модель
[ редактировать ]Непрерывное моделирование основано на наборе дифференциальных уравнений. Эти уравнения определяют особенность переменных состояния, так сказать, факторов окружающей среды системы. Эти параметры системы непрерывно изменяются и, таким образом, меняют состояние всей системы. [6]
Набор дифференциальных уравнений можно сформулировать в виде концептуальной модели, представляющей систему на абстрактном уровне. Для разработки концептуальной модели возможны два подхода:
- Дедуктивный . подход: поведение системы определяется физическими законами, которые можно применить
- Индуктивный . подход: поведение системы возникает из наблюдаемого поведения примера [7]
Широко известным примером непрерывной концептуальной имитационной модели является «модель хищник-жертва».
Модель хищник-жертва
[ редактировать ]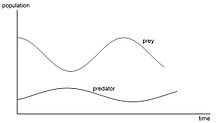
Эта модель типична для выявления динамики популяций. Пока популяция жертв растет, популяция хищников также растет, поскольку у них есть достаточно еды. Но очень скоро популяция хищников становится слишком большой, и охота превышает воспроизводство добычи. Это приводит к уменьшению популяции жертв и, как следствие этого, к уменьшению популяции хищников, поскольку им не хватает пищи, чтобы прокормить всю популяцию. [8]
Любая демографическая динамика включает в себя события рождения и смерти и, следовательно, по своей сути представляет собой дискретную динамическую систему. Однако моделирование дискретных изменений состояния с помощью дифференциальных уравнений часто дает полезную информацию. Непрерывное моделирование динамики населения представляет собой приближение, эффективно подгоняющее кривую к конечному набору измерений/точек.
Математическая теория
[ редактировать ]При непрерывном моделировании непрерывный временной отклик физической системы моделируется с использованием ОДУ , встроенных в концептуальную модель. Временной отклик физической системы зависит от ее начального состояния. Задача решения ОДУ для заданного начального состояния называется задачей начального значения.
В очень немногих случаях эти ОДУ можно решить простым аналитическим способом. Более распространены ОДУ, не имеющие аналитического решения. В этих случаях приходится использовать процедуры численной аппроксимации.
Два хорошо известных семейства методов решения задач начального значения:
- Рунге -Кутта Семья
- Семейство Linear Multistep . [9]
При использовании числовых решателей необходимо учитывать следующие свойства решателя:
- стабильность метода
- свойство метода жесткости
- разрывность метода
- Заключительные замечания, содержащиеся в методе и доступные пользователю
Эти моменты имеют решающее значение для успеха использования одного метода. [10]
Математические примеры
[ редактировать ]закон Ньютона Второй F = m a является хорошим примером непрерывной системы с одним ОДУ. методы численного интегрирования, такие как Рунге Кутта или Булирш-Стоер Для решения этой конкретной системы ОДУ можно использовать .
Путем объединения решателя ОДУ с другими числовыми операторами и методами непрерывный симулятор можно использовать для моделирования множества различных физических явлений, таких как
- динамика полета
- робототехника
- автомобильные подвески
- гидравлика
- электроэнергия
- электродвигатели
- человеческое дыхание
- таяние полярных льдов
- паровые электростанции
- кофемашина
- и т. д.
Практически нет ограничений на виды физических явлений, которые можно смоделировать с помощью системы ОДУ. Однако в некоторых системах не могут быть явно определены все производные условия на основе известных входных данных и других выходных данных ОДУ. Эти производные члены неявно определяются другими системными ограничениями, такими как закон Кирхгофа, согласно которому поток заряда в соединение должен равняться потоку наружу. сходящуюся итерационную схему, такую как Ньютон-Рафсон Для решения этих неявных систем ОДУ необходимо использовать .
Программное обеспечение для моделирования
[ редактировать ]Чтобы ускорить создание непрерывного моделирования, вы можете использовать пакеты программного обеспечения графического программирования, такие как VisSim или Simcad Pro .Пакеты предоставляют параметры метода интеграции, размера шага, метода оптимизации, неизвестных и функции стоимости, а также допускают условное выполнение подсистем для ускорения выполнения и предотвращения числовых ошибок для определенных областей. Такое программное обеспечение для графического моделирования можно запускать в режиме реального времени и использовать в качестве средства обучения для менеджеров и операторов. [11]
Современные приложения
[ редактировать ]Непрерывное моделирование обнаружено
- внутри Wii станций
- коммерческие авиасимуляторы
- автопилоты реактивных самолетов [12]
- передовые инструменты инженерного проектирования [13]
Действительно, большая часть современных технологий, которыми мы пользуемся сегодня, была бы невозможна без непрерывного моделирования.
Другие виды моделирования
[ редактировать ]- Дискретное моделирование событий
- Компьютерное моделирование
- Моделирование процессов
- Учебное моделирование
- Социальная симуляция
См. также
[ редактировать ]- Программное обеспечение для моделирования
- Системная динамика
- Список программного обеспечения для компьютерного моделирования
Ссылки
[ редактировать ]- ^ Описание непрерывного моделирования из Утрехтского университета. Архивировано 9 июня 2011 г. в Wayback Machine.
- ^ Определение моделирования со ссылкой на «непрерывное моделирование» на Encyclepedia.com.
- ^ Моделирование электрических цепей из Мемориального университета Канады.
- ^ «Интеллектуальные робототехнические системы», паб. Спрингер Линк ISBN 978-0-306-46062-3
- ^ «Развитие бизнес-симуляции и экспериментальных упражнений, том 13, 1986 г.» (PDF) . sbaweb.wayne.edu . Архивировано из оригинала (PDF) 7 апреля 2014 г. Проверено 23 января 2012 г.
- ^ «Непрерывное моделирование» . www.scribd.com . Проверено 23 января 2012 г.
- ^ Луи Дж. Бирта, Гилберт Арбез (2007). Моделирование и симуляция, с. 249 . Спрингер.
- ^ Луи Дж. Бирта, Гилберт Арбез (2007). Моделирование и симуляция, с. 255 . Спрингер.
- ^ Луи Дж. Бирта, Гилберт Арбез (2007). Моделирование и симуляция, с. 282 . Спрингер.
- ^ Луи Дж. Бирта, Гилберт Арбез (2007). Моделирование и симуляция, с. 288 . Спрингер.
- ^ « Программное обеспечение непрерывного моделирования «на лету» для моделирования непрерывных потоков – технология моделирования жидкости и газа, встроенная в Simcad Pro» . createasoft.com . Архивировано из оригинала 17 декабря 2012 г. Проверено 26 января 2012 г.
- ^ Да, Цзюн-Санг; Ван, Цзянь Лян; Сундарараджан, Н. (2000). «Надежная конструкция H∞-пилотного контроллера с выборочными данными для маневра по крену с высокой стабильностью α». Практика управления инженерной деятельностью . 8 (7): 735–747. дои : 10.1016/S0967-0661(99)00202-6 .
- ^ Язык визуального моделирования VisSim для непрерывного моделирования и разработки на основе моделей.