Противокачковый гироскоп
Судовые стабилизирующие гироскопы — это технология, разработанная в 19-м и начале 20-го века и используемая для стабилизации крена океанских кораблей. В этом применении он потерял популярность по сравнению с гидродинамическими стабилизаторами поперечной устойчивости из-за снижения стоимости и веса. Однако с 1990-х годов возобновился интерес к устройствам малоскоростной стабилизации судов (Tohmei, Seakeeper, Quick MC2 и др.). В отличие от традиционных плавников, гироскоп не зависит от скорости движения корабля для создания стабилизирующего момента крена и, следовательно, может стабилизировать моторные яхты, стоящие на якоре. Однако стабилизаторы плавников последнего поколения с «нулевой скоростью» (CMC, Humphree и т. д.) могут стабилизировать яхты на якоре благодаря их эксцентриситету относительно вала.
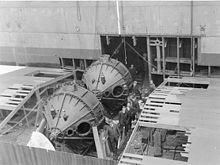
Транспортный корабль времен Первой мировой войны USS Henderson , построенный в 1917 году, был первым большим кораблем с гиростабилизаторами. Он имел два 25-тонных маховика диаметром 9 футов (2,7 м), установленных недалеко от центра корабля, которые вращались со скоростью 1100 об / мин с помощью двигателей переменного тока мощностью 75 л.с. (56 кВт). Корпуса гироскопов крепились на вертикальных подшипниках. Когда небольшой сенсорный гироскоп на мостике обнаруживал крен, серводвигатель поворачивал гироскопы вокруг вертикальной оси в таком направлении, чтобы их прецессия противодействовала крену. В ходе испытаний эта система смогла снизить крен до 3 градусов в самом сильном море.
Одним из самых известных кораблей, впервые использовавших стабилизатор поперечной качки, был итальянский пассажирский лайнер SS Conte di Savoia , который впервые вышел в море в ноябре 1932 года. Он имел три маховика диаметром 13 футов и весом 108 тонн. [1]
Корабельный гироскопический стабилизатор обычно работает, ограничивая ось крена гироскопа и позволяя ему «прецессировать» либо по осям тангажа, либо по осям рыскания. Если позволить ему прецессировать по мере крена корабля, его вращающийся ротор создает противодействующий стабилизирующий момент крена, создаваемый волнами на корпусе корабля. Его способность эффективно делать это зависит от ряда факторов, включая его размер, вес и угловой момент. На это также влияет период крена корабля. Для эффективных судовых установок требуются роторы, вес которых составляет примерно от 3% до 5% от водоизмещения судна.
В отличие от гидродинамических килей, стабилизирующих крен, корабельный гироскопический стабилизатор может создавать лишь ограниченный стабилизирующий момент, который может быть превышен по мере увеличения высоты волны. В противном случае производитель нередко рекомендует не использовать устройство в море при больших волнах.
Вместо обеспечения стабилизации та же самая технология может использоваться для активного управления ориентацией, как это делают гироскопы управляющего момента в космических кораблях, для обеспечения управления ориентацией .
См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ "Итальянский лайнер, бросающий вызов волнам", Popular Mechanics, апрель 1931 г.