Гироскоп

Гироскоп ориентации (от древнегреческого γῦρος gŷros , «круглый» и σκοπέω skopéō , «смотреть») — устройство, используемое для измерения или поддержания и угловой скорости . [1] [2] Это прялка или диск, в котором ось вращения (ось вращения) может сама по себе принимать любую ориентацию. При вращении ориентация этой оси не зависит от наклона или поворота крепления в соответствии с законом сохранения углового момента .
в микрочипах, Также существуют гироскопы, основанные на других принципах работы, такие как гироскопы MEMS используемые в электронных устройствах (иногда называемые гирометрами ), твердотельные кольцевые лазеры , волоконно-оптические гироскопы и чрезвычайно чувствительные квантовые гироскопы . [3]
Приложения гироскопов включают инерциальные навигационные системы , такие как космический телескоп Хаббл или внутри стального корпуса затопленной подводной лодки. Благодаря своей точности гироскопы также используются в гиротеодолитах для поддержания направления при разработке туннелей. [4] Гироскопы могут использоваться для создания гирокомпасов , которые дополняют или заменяют магнитные компасы (на кораблях, самолетах и космических кораблях, транспортных средствах в целом), для обеспечения устойчивости (велосипеды, мотоциклы и корабли) или использоваться как часть инерциальной системы наведения .
МЭМС-гироскопы популярны в некоторой бытовой электронике, например в смартфонах.
Описание и схема [ править ]

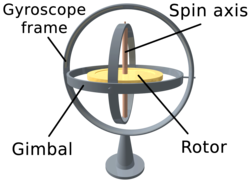
Гироскоп — это инструмент, состоящий из колеса, установленного на двух или трех подвесах, обеспечивающих поворотные опоры, позволяющие колесу вращаться вокруг одной оси. Набор из трех подвесов, один из которых установлен на другом с ортогональными осями поворота, может использоваться для того, чтобы позволить колесу, установленному на самом внутреннем подвесе, иметь ориентацию, остающуюся независимой от ориентации в пространстве его опоры.
В случае гироскопа с двумя подвесами внешний подвес, представляющий собой раму гироскопа, устанавливается так, чтобы поворачиваться вокруг оси в собственной плоскости, определяемой опорой. Этот внешний подвес обладает одной степенью свободы вращения, а его ось — ни одной. Второй подвес, внутренний подвес, установлен в раме гироскопа (внешний подвес) так, чтобы вращаться вокруг оси в своей плоскости, которая всегда перпендикулярна оси поворота рамы гироскопа (внешний подвес). Этот внутренний подвес имеет две степени свободы вращения.
Ось вращающегося колеса (ротора) определяет ось вращения. Ротор вынужден вращаться вокруг оси, которая всегда перпендикулярна оси внутреннего подвеса. Таким образом, ротор обладает тремя степенями свободы вращения, а его ось — двумя.Ротор реагирует на силу, приложенную к входной оси, силой реакции на выходную ось.
Маховик гироскопа будет вращаться или сопротивляться вокруг выходной оси в зависимости от того, имеют ли выходные подвесы свободную или фиксированную конфигурацию. Примером некоторых устройств со свободным выходом являются гироскопы управления ориентацией, используемые для измерения или измерения углов наклона, крена и рыскания космического корабля или самолета.
Центр тяжести ротора может находиться в фиксированном положении. Ротор одновременно вращается вокруг одной оси и способен колебаться вокруг двух других осей, а также может свободно вращаться в любом направлении вокруг фиксированной точки (за исключением собственного сопротивления, вызванного вращением ротора). В некоторых гироскопах один или несколько элементов заменены механическими эквивалентами. Например, вращающийся ротор может быть подвешен в жидкости, а не установлен на подвесах. Гироскоп управляющего момента (CMG) является примером устройства с фиксированным выходом, которое используется на космическом корабле для удержания или поддержания желаемого угла ориентации или направления наведения с использованием силы гироскопического сопротивления.
В некоторых особых случаях внешний подвес (или его эквивалент) может отсутствовать, так что ротор будет иметь только две степени свободы. В других случаях центр тяжести ротора может быть смещен относительно оси колебаний, и, таким образом, центр тяжести ротора и центр подвески ротора могут не совпадать.
История [ править ]

Ранние подобные устройства
По сути, гироскоп — это волчок , объединенный с парой подвесов . Топы были изобретены во многих разных цивилизациях, включая классическую Грецию, Рим и Китай. [5] Большинство из них не использовались в качестве инструментов.
Первый известный аппарат, похожий на гироскоп («Вращающееся зеркало» или «Зеркало Серсона»), был изобретен Джоном Серсоном в 1743 году. Он использовался в качестве уровня для определения горизонта в туманных или туманных условиях.
Первый инструмент, больше похожий на настоящий гироскоп, был изготовлен Иоганном Боненбергером из Германии, который впервые написал о нем в 1817 году. Сначала он назвал его «Машиной». [6] [7] [8] Машина Боненбергера основывалась на вращающейся массивной сфере. [9] В 1832 году американец Уолтер Р. Джонсон разработал аналогичное устройство, основанное на вращающемся диске. [10] [11] Французский математик Пьер-Симон Лаплас , работавший в Политехнической школе в Париже, рекомендовал машину для использования в качестве учебного пособия, и таким образом она привлекла внимание Леона Фуко . [12]
Гироскоп Фуко [ править ]
В 1852 году Фуко использовал его в эксперименте, демонстрирующем вращение Земли. [13] [14]
Именно Фуко дал устройству его современное название, в эксперименте по наблюдению (греч. skopeein , видеть) вращения Земли (греч. gyros , круг или вращение), [15] [16] что было видно за 8–10 минут до того, как трение замедлило вращающийся ротор.
Коммерциализация [ править ]
В 1860-х годах появление электродвигателей позволило гироскопу вращаться бесконечно; это привело к созданию первого прототипа указателей курса и довольно более сложного устройства — гирокомпаса . Первый функциональный гирокомпас был запатентован в 1904 году немецким изобретателем Германом Аншюц-Кемпфе . [17] Позже в том же году американец Элмер Сперри разработал свою собственную разработку, и вскоре другие страны осознали военную важность изобретения — в эпоху, когда военно-морское мастерство было наиболее важным показателем военной мощи — и создали свои собственные производства гироскопов. Компания Sperry Gyrscope быстро расширилась и стала производить стабилизаторы для самолетов и военно-морских сил, и ее примеру последовали и другие разработчики гироскопов. [18] [ нужна полная цитата ]
Примерно в 1911 году компания LT Hurst Mfg Co из Индианаполиса начала производство «гироскопа Херста» - игрушечного гироскопа с тросом и подставкой. В какой-то момент производство было передано компании Chandler Mfg Co (все еще под брендом Hurst). Позже продукт был переименован в «гироскоп Chandler», предположительно потому, что Chandler Mfg Co. приобрела права на гироскоп. Чендлер продолжал производить игрушку до тех пор, пока компания не была куплена TEDCO Inc. в 1982 году. TEDCO до сих пор производит гироскоп. [19] [20]
В первые несколько десятилетий 20-го века другие изобретатели пытались (безуспешно) использовать гироскопы в качестве основы для первых навигационных систем «черного ящика» , создавая стабильную платформу, с которой можно было бы выполнять точные измерения ускорения (чтобы обойти необходимость в звездных измерениях). наблюдения для расчета положения). Позднее аналогичные принципы были использованы при разработке инерциальных навигационных систем баллистических ракет . [21] [ нужна полная цитата ]
Во время Второй мировой войны гироскоп стал основным компонентом авиационных и зенитных прицелов. [22] После войны гонка за миниатюризацией гироскопов для управляемых ракет и систем навигации вооружения привела к разработке и производству так называемых миниатюрных гироскопов , которые весили менее 3 унций (85 г) и имели диаметр примерно 1 дюйм (2,5 см). . Некоторые из этих миниатюрных гироскопов могли достигать скорости 24 000 оборотов в минуту менее чем за 10 секунд. [23]
Гироскопы продолжают оставаться инженерной проблемой. Например, осевые подшипники должны быть чрезвычайно точными. Подшипникам намеренно придается небольшое трение, так как в противном случае точность будет лучше, чем потребуется дюйм (2,5 нм). [24]

Трехосные гироскопы на основе МЭМС также используются в портативных электронных устройствах, таких как планшеты , [25] смартфоны , [26] и умные часы . [27] Это дополняет возможность измерения 3-осевого ускорения, доступную на устройствах предыдущих поколений. Вместе эти датчики обеспечивают 6-компонентное обнаружение движения; акселерометры для движения по осям X, Y и Z, а также гироскопы для измерения степени и скорости вращения в пространстве (крен, тангаж и рыскание). Некоторые устройства [28] [29] дополнительно включите магнитометр для обеспечения абсолютных угловых измерений относительно магнитного поля Земли. Новые инерциальные измерительные блоки на базе МЭМС объединяют до всех девяти осей измерения в едином корпусе интегральной схемы, обеспечивая недорогие и широко доступные измерения движения. [30]
Гироскопические принципы [ править ]
Все вращающиеся объекты обладают гироскопическими свойствами. Основные свойства, которые может испытывать объект при любом гироскопическом движении, — это жесткость в пространстве и прецессия .
Жесткость в космосе [ править ]
Жесткость в космосе описывает принцип, согласно которому гироскоп остается в фиксированном положении в плоскости, в которой он вращается, независимо от вращения Земли. Например, велосипедное колесо. Ранние формы гироскопа (тогда еще не известные под названием) использовались для демонстрации этого принципа. [31]
Прецессия [ править ]
Простой случай прецессии, также известный как устойчивая прецессия, может быть описан следующим соотношением с моментом:

где представляет собой прецессию, представлен спином, - угол нутации, а представляет инерцию вдоль соответствующей оси. Это соотношение справедливо только в том случае, если момент по осям Y и Z равен 0.




Уравнение можно сократить, заметив, что угловая скорость вдоль оси z равна сумме прецессии и вращения: , Где представляет угловую скорость вдоль оси z.



или

Гироскопическая прецессия вызывается крутящим моментом. Это скорость изменения углового момента, вызываемого приложенным крутящим моментом. Прецессия приводит к противоречивым динамическим результатам, например, к тому, что волчок не падает. Прецессия используется в аэрокосмической отрасли для определения изменений положения и направления.
использование Современное
Стедикам [ править ]
в использовалась установка Steadicam Во время съемок фильма 1983 года « Возвращение джедая» сочетании с двумя гироскопами для дополнительной стабилизации для съемки фоновых пластин во время погони на спидер-байке . Изобретатель Steadicam Гаррет Браун руководил съемкой, прогуливаясь по лесу из красного дерева, управляя камерой со скоростью один кадр в секунду. При проецировании со скоростью 24 кадра в секунду создавалось впечатление полета по воздуху на опасной скорости. [33] [34]
Индикатор заголовка [ править ]
Указатель курса или гироскоп направления имеет ось вращения, расположенную горизонтально и указывающую на север. В отличие от магнитного компаса, он не ищет север. Например, при использовании в самолете он будет медленно отклоняться от севера, и его необходимо будет периодически переориентировать, используя магнитный компас в качестве ориентира. [35]
Гирокомпас [ править ]
В отличие от гироскопа направления или указателя курса, гирокомпас ищет север. Он обнаруживает вращение Земли вокруг своей оси и ищет истинный север, а не магнитный север. Гирокомпасы обычно имеют встроенное демпфирование, чтобы предотвратить перерегулирование при повторной калибровке из-за внезапного движения.
Акселерометр [ править ]
Определив ускорение объекта и проинтегрировав его по времени, можно рассчитать скорость объекта. Снова интегрируя, можно определить положение. Простейший акселерометр представляет собой свободно перемещающийся по горизонтали груз, прикрепленный к пружине и устройству для измерения напряжения пружины. Это можно улучшить, если ввести противодействующую силу, которая толкает груз назад, и измерить силу, необходимую для предотвращения перемещения груза. Более сложная конструкция состоит из гироскопа с грузом на одной из осей. Устройство будет реагировать на силу, создаваемую грузом при ускорении, объединяя эту силу для создания скорости. [36]
Вариации [ править ]
Гиростат [ править ]
Гиростат . состоит из массивного маховика, скрытого в прочном корпусе [37] [38] Его поведение на столе или при различных режимах подвески или поддержки служит иллюстрацией любопытного изменения обычных законов статического равновесия из-за гиростатического поведения внутреннего невидимого маховика при быстром вращении. Первый гиростат был разработан лордом Кельвином, чтобы проиллюстрировать более сложное состояние движения вращающегося тела, когда оно может свободно перемещаться по горизонтальной плоскости, как волчок, вращающийся на тротуаре, или велосипед на дороге. [39] Кельвин [40] также использовал гиростаты для разработки механических теорий упругости материи и эфира. [41] В современной механике сплошных сред существует разновидность таких моделей, основанная на идеях лорда Кельвина. Они представляют собой особый тип теорий Коссера (впервые предложенных Эженом Коссера и Франсуа Коссера ), которые можно использовать для описания искусственно созданных интеллектуальных материалов, а также других сложных сред. Одна из них, так называемая среда Кельвина, имеет те же уравнения, что и магнитные изоляторы вблизи состояния магнитного насыщения в приближении квазимагнитостатики. [42]
В настоящее время концепция гиростата используется при проектировании систем ориентации орбитальных космических кораблей и спутников. [43] Например, космическая станция «Мир» имела три пары внутренних маховиков, известных как гиродины или гироскопы управления моментом . [44]
В физике существует несколько систем, динамические уравнения которых напоминают уравнения движения гиростата. [45] Примеры включают твердое тело с полостью, заполненной невязкой, несжимаемой, однородной жидкостью. [46] статическая равновесная конфигурация напряжённого упругого стержня в теории упругости , [47] динамика поляризации светового импульса, распространяющегося через нелинейную среду, [48] система Лоренца в теории хаоса, [49] и движение иона в масс-спектрометре с ловушкой Пеннинга . [50]
МЭМС-гироскоп [ править ]
Гироскоп микроэлектромеханических систем (МЭМС) — это миниатюрный гироскоп, используемый в электронных устройствах. Он использует идею маятника Фуко и использует вибрирующий элемент. Этот тип гироскопа впервые использовался в военных целях, но с тех пор его стали использовать в коммерческих целях. [51]
ХРГ [ править ]
Полусферический резонаторный гироскоп (HRG), также называемый рюмочным гироскопом. [52] или грибной гироскоп, использует тонкую твердотельную полусферическую оболочку, закрепленную толстым стержнем. Эта оболочка приводится в изгибный резонанс под действием электростатических сил, создаваемых электродами, которые наносятся непосредственно на отдельные структуры из плавленого кварца, окружающие оболочку. Гироскопический эффект достигается за счет инерционности изгибных стоячих волн. [53]
VSG или CVG [ править ]
Гироскоп с вибрирующей структурой (VSG), также называемый вибрационным гироскопом Кориолиса (CVG), [54] использует резонатор, изготовленный из различных металлических сплавов. Он занимает позицию между низкоточным и дешевым МЭМС-гироскопом и более точным и дорогим оптоволоконным гироскопом. Параметры точности повышаются за счет использования материалов с низким собственным демпфированием, вакуумирования резонатора и цифровой электроники для уменьшения температурно-зависимого дрейфа и нестабильности управляющих сигналов. [55]
Высококачественные резонаторы для вина используются в точных датчиках, таких как HRG. [56]
ДТГ [ править ]
Динамически настраиваемый гироскоп (ДТГ) представляет собой ротор, подвешенный на карданном шарнире с шарнирными шарнирами. [57] Жесткость пружины изгиба не зависит от скорости вращения. Однако динамическая инерция (из-за эффекта гироскопической реакции) подвеса обеспечивает отрицательную жесткость пружины, пропорциональную квадрату скорости вращения (Howe and Savet, 1964; Lawrence, 1998). Следовательно, на определенной скорости, называемой скоростью настройки, два момента компенсируют друг друга, освобождая ротор от крутящего момента, что является необходимым условием идеального гироскопа.
Кольцевой лазерный гироскоп [ править ]
Кольцевой лазерный гироскоп использует эффект Саньяка для измерения вращения путем измерения сдвига интерференционной картины луча, разделенного на два отдельных луча, которые движутся по кольцу в противоположных направлениях.
Когда Боинг 757-200 поступил на вооружение в 1983 году, он был оснащен первым подходящим кольцевым лазерным гироскопом. На разработку этого гироскопа ушло много лет, и экспериментальные модели претерпели множество изменений, прежде чем инженеры и менеджеры компаний Honeywell и Boeing сочли его готовым к производству . Это был результат конкуренции с механическими гироскопами, которые постоянно совершенствовались. Причина, по которой Honeywell из всех компаний решила разработать лазерный гироскоп, заключалась в том, что они были единственной компанией, у которой не было успешной линейки механических гироскопов, поэтому они не могли конкурировать сами с собой. Первая проблема, которую им пришлось решить, заключалась в том, что при использовании лазерных гироскопов вращение ниже определенного минимума вообще невозможно было обнаружить из-за проблемы, называемой «синхронизация», когда два луча действуют как связанные генераторы и сближают частоты друг друга. и, следовательно, нулевой выход. Решением было быстро встряхнуть гироскоп, чтобы он никогда не зафиксировался. Парадоксально, но слишком регулярное колебательное движение приводило к накоплению коротких периодов блокировки, когда устройство находилось в покое в крайних точках своего вибрационного движения. Это лечилось применением случайного белый шум на вибрацию. Материал блока также был изменен с кварца на новую стеклокерамику Cer-Vit производства Owens Corning из-за утечек гелия. [58]
Волоконно-оптический гироскоп [ править ]
Волоконно -оптический гироскоп также использует интерференцию света для обнаружения механического вращения. Две половины разделенного луча движутся в противоположных направлениях в бухте оптоволоконного кабеля длиной до 5 км. Как и кольцевой лазерный гироскоп , он использует эффект Саньяка . [59]
Лондонский момент [ править ]
Лондонский моментный гироскоп основан на квантово-механическом явлении, при котором вращающийся сверхпроводник генерирует магнитное поле , ось которого точно совпадает с осью вращения гироскопического ротора. Магнитометр определяет ориентацию генерируемого поля, которое интерполируется для определения оси вращения. Гироскопы этого типа могут быть чрезвычайно точными и стабильными. Например, те, которые использовались в эксперименте Gravity Probe B, измеряли изменения ориентации оси вращения гироскопа с точностью более 0,5 угловых миллисекунд (1,4 × 10 −7 градусов, или около 2,4 × 10 −9 радиан ) в течение одного года. [60] Это эквивалентно угловому разделению шириной человеческого волоса, наблюдаемому с расстояния 32 километров (20 миль). [61]
Гироскоп GP-B состоит из почти идеальной сферической вращающейся массы из плавленого кварца , которая обеспечивает диэлектрическую опору для тонкого слоя ниобиевого сверхпроводящего материала. Чтобы устранить трение, свойственное обычным подшипникам, узел ротора центрируется электрическим полем шести электродов. После первоначального раскрутки струей гелия, которая доводит ротор до 4000 об/мин , полированный корпус гироскопа вакуумируется до сверхвысокого вакуума, чтобы еще больше уменьшить сопротивление ротора. При условии, что электроника подвески останется включенной, чрезвычайная симметрия вращения , отсутствие трения и низкое сопротивление позволят угловому моменту ротора поддерживать его вращение в течение примерно 15 000 лет. [62]
Чувствительный СКВИД постоянного тока , который может различать изменения размером всего в один квант, или примерно 2 × 10. −15 Wb используется для контроля гироскопа. Прецессия или наклон ориентации ротора приводит к смещению магнитного поля момента Лондона относительно корпуса. Движущееся поле проходит через сверхпроводящую петлю, прикрепленную к корпусу, индуцируя небольшой электрический ток. Ток создает напряжение на шунтирующем сопротивлении, которое микропроцессор преобразует в сферические координаты. Система предназначена для минимизации крутящего момента Лоренца на роторе. [63] [64]
Другие примеры [ править ]
Вертолеты [ править ]
Несущий винт вертолета действует как гироскоп. На его движение влияет принцип гироскопической прецессии, который заключается в том, что сила, приложенная к вращающемуся объекту, будет иметь максимальную реакцию примерно на 90 градусов позже. Реакция может отличаться от 90 градусов, когда действуют другие, более сильные силы. [65] Чтобы изменить направление, вертолеты должны корректировать угол тангажа и угол атаки. [66]
Гироскоп X [ править ]
Прототип автомобиля Gyro X, созданный Алексом Тремулисом и Томасом Саммерсом в 1967 году. В автомобиле использовалась гироскопическая прецессия для движения на двух колесах. В роли большого гироскопа выступал узел, состоящий из маховика, установленного в корпусе кардана под капотом автомобиля. Маховик вращался с помощью гидравлических насосов, создавая гироскопический эффект на машину. Прецессионный плунжер отвечал за вращение гироскопа, чтобы изменить направление силы прецессии и противодействовать любым силам, вызывающим дисбаланс транспортного средства. Единственный в своем роде прототип сейчас находится в музее Lane Motor в Нэшвилле, штат Теннесси. [67]
Бытовая электроника [ править ]

Гироскопы используются не только в компасах, самолетах, компьютерных манипуляторах и т. д., но и в бытовой электронике.
Поскольку гироскоп позволяет рассчитывать ориентацию и вращение, конструкторы внедрили их в современные технологии. Интеграция гироскопа позволила более точно распознавать движение в трехмерном пространстве, чем предыдущий одиночный акселерометр в ряде смартфонов. Гироскопы в бытовой электронике часто комбинируются с акселерометрами для более надежного определения направления и движения. Примеры таких приложений включают такие смартфоны, как Samsung Galaxy Note 4 , [68] ХТЦ Титан , [69] Нексус 5 , айфон 5с , [70] Нокиа 808 ПьюрВью [71] и Sony Xperia , периферийные устройства для игровых консолей, такие как контроллер PlayStation 3 и Wii Remote , а также гарнитуры виртуальной реальности, такие как Oculus Rift . [72]
Nintendo интегрировала гироскоп в контроллер Wii Remote консоли Wii с помощью дополнительного оборудования под названием « Wii MotionPlus ». [73] Он также включен в контроллеры 3DS , Wii U GamePad и Nintendo Switch Joy-Con и Pro , которые обнаруживают движение при повороте и встряхивании.
Круизные лайнеры используют гироскопы для выравнивания чувствительных к движению устройств, таких как самовыравнивающиеся бильярдные столы. [74]
В качестве альтернативы тренировочным колесам продается гироскоп-маховик с электроприводом, вставленный в колесо велосипеда. [75] Некоторые функции телефонов Android, такие как PhotoSphere или 360 Camera, а также использование гаджета VR, не работают без датчика гироскопа в телефоне. [76]
См. также [ править ]
- Аэротрим
- Акселерометр
- Противокачковый гироскоп
- Индикатор отношения
- Балансировочная машина
- Контрруление
- углы Эйлера
- Эрик Лейтуэйт
- Гирокар
- Гироскопический монорельс
- Гироскопический инструмент для упражнений
- Инерционная единица измерения
- Магнитометр
- Молекулярный гироскоп
- Реактивное колесо
- Нарезка
- Динамика жесткого тела
- Индикатор поворота и крена
- Координатор поворотов
- Стабилизатор
Примечания [ править ]
- ^ «Гироскоп» . Оксфордские словари . Архивировано из оригинала 5 мая 2015 года . Проверено 4 мая 2015 г.
- ^ Кабаи, Шандор (28 сентября 2007 г.). «Гироскоп» . Демонстрационный проект Wolfram . Вольфрам . Архивировано из оригинала 30 апреля 2008 года.
- ^ Тао, В.; Лю, Т.; Чжэн, Р.; Фэн, Х. (2012). «Анализ походки с использованием носимых датчиков» . Датчики . 12 (2). Базель, Швейцария: 2255–2283 гг. Бибкод : 2012Senso..12.2255T . дои : 10.3390/s120202255 . ПМК 3304165 . ПМИД 22438763 . .
- ^ «20 фактов о туннелях, которые вы не знали» . Обнаружить . 29 апреля 2009 г. Архивировано из оригинала 15 июня 2009 г.
- ^ Рэндж, Шеннон К'доа; Маллинз, Дженнифер. «Краткая история гироскопов» . Архивировано из оригинала 10 июля 2015 года.
- ^ Иоганн Г. Ф. Боненбергер (1817) «Описание машины для объяснения законов вращения Земли вокруг своей оси и изменения положения последней» (Описание машины для объяснения законов вращения Земли) Земли вокруг своей оси и изменения ориентации последней), Тюбингенские листы по естественным наукам и медицине. Архивировано 19 июля 2011 года в Wayback Machine , vol. 3, страницы 72–83.
- ^ Французский математик Пуассон упоминает машину Боненбергера еще в 1813 году: Симеон-Дени Пуассон (1813) «Мемуары об особом случае вращательного движения массивных тел», Journal de École Polytechnique , vol. 9, стр. 247–262. Доступно онлайн по адресу: Ion.org. Архивировано 19 июля 2011 г. на Wayback Machine.
- ^ Вагнер, Йорг Ф.; Триренберг, Андор (2014), Штейн, Эрвин (редактор), «Машина Боненбергера» , История теоретической, материальной и вычислительной механики - математика встречается с механикой и инженерией , Конспекты лекций по прикладной математике и механике, Берлин, Гейдельберг: Спрингер, стр. 81–100, номер документа : 10.1007/978-3-642-39905-3_6 , ISBN. 978-3-642-39905-3 , получено 20 февраля 2021 г.
- ^ Фотография инструмента Боненбергера доступна в Интернете здесь: Ion.org. Архивировано 28 сентября 2007 года в музее Wayback Machine ION: Машина Боненбергера.
- ^ Уолтер Р. Джонсон (январь 1832 г.). «Описание аппарата под названием ротаскоп для демонстрации нескольких явлений и иллюстрации определенных законов вращательного движения». Архивировано 19 августа 2016 года в Wayback Machine , Американский журнал науки и искусства , 1-я серия, том. 21, нет. 2, страницы 265–280.
- ↑ Рисунки гироскопа Уолтера Р. Джонсона («ротаскопа») были использованы для иллюстрации явлений в следующей лекции: Э. С. Снелл (1856 г.) «О планетарных возмущениях», Архивировано 19 августа 2016 г. в Wayback Machine Попечительском совете , Десятый годовой отчет Попечительский совет Смитсоновского института.... (Вашингтон, округ Колумбия: Корнелиус Венделл, 1856 г.), страницы 175–190.
- ^ «Музей ИОН: Машина Боненбергера» . Архивировано из оригинала 28 сентября 2007 года . Проверено 24 мая 2007 г.
- ^ Л. Фуко (1852) «О явлениях ориентации вращающихся тел, увлекаемых осью, прикрепленной к поверхности земли - Новые ощутимые признаки суточного движения», Еженедельные отчеты сессий Академии наук . (Париж) , вып. 35, стр. 424–427. Доступно в Интернете (на французском языке): Gallica.bnf.fr. Архивировано 16 июля 2012 г. на Wayback Machine.
- ↑ Около 1852 года Фридрих Фессель, немецкий механик и бывший учитель средней школы, самостоятельно разработал гироскоп. См.: (1) Юлиус Плюкер (сентябрь 1853 г.) «О машине вращения Фесселя», Annals of Physics , вып. 166, № 9, стр. 174–177; (2) Юлиус Плюкер (октябрь 1853 г.) «Еще слово о машине вращения Фесселя», Annals of Physics , vol. 166, вып. 10, стр. 348–351; (3) Чарльз Уитстон (1864 г.) «О гироскопе Фесселя». Архивировано 19 августа 2016 г. в Wayback Machine , Proceedings of the Royal Society of London , vol. 7, страницы 43–48.
- ^ Оксфордский словарь английского языка . Том. VI (2-е изд.). 1989. с. 985 . Проверено 11 марта 2023 г.
- ^ Фуко, Леон (1852b). «Механика: О явлениях ориентации вращающихся тел, приводимых в движение неподвижной осью на поверхности Земли. Новые чувствительные признаки суточного движения» . Еженедельные отчеты сессий Академии наук (на французском языке). 35 (неделя понедельника, 27 сентября 1852 г.). Готье-Виллар: 427.
- ^ Герман Аншютц-Кемпфе и Фридрих фон Ширах, «Kreiselapparat» (гироскоп), немецкий рейхспатен № 182855 (подано: 27 марта 1904 г.; выдано: 2 апреля 1907 г.).
- ^ Маккензи, Дональд. Изобретая точность: историческая социология наведения ядерных ракет . Кембридж: MIT Press, 1990. стр. 31–40. ISBN 0-262-13258-3
- ^ Анон. «Игрушки TEDCO – крутая история компании, отличные научные наборы» . Сайт компании TEDCO Toys . O'Reilly Media Inc. Архивировано из оригинала 9 марта 2009 года . Проверено 23 декабря 2010 г.
- ^ «История гироскопа Тедко» . ООО "Брайтфьюжн " Проверено 10 мая 2024 г.
- ^ Маккензи, Дональд. Изобретая точность: историческая социология наведения ядерных ракет . Кембридж: MIT Press, 1990. стр. 40–42. ISBN 0-262-13258-3
- ↑ «Маленький волчок, который целится из пистолета». Архивировано 10 июля 2011 года в Wayback Machine Голдом Сандерсом, Popular Science , июль 1945 года.
- ^ Журналы, Hearst (1 марта 1954 г.). «Популярная механика» . Журналы Херста. Архивировано из оригинала 2 февраля 2017 года.
- ^ Фейнман, Готлиб и Лейтон 2013 , стр. 148–149.
- ^ «iPad – сравнение моделей» . Яблоко . Архивировано из оригинала 24 октября 2012 года.
- ^ «Разбор гироскопа iPhone 4» . 24 июня 2010 года. Архивировано из оригинала 24 ноября 2011 года . Проверено 11 ноября 2011 г.
- ^ Келон, Лео (9 сентября 2014 г.). «Умные часы: характеристики и обзоры ведущих моделей» . Технология. Новости Би-би-си . Архивировано из оригинала 28 августа 2015 года.
- ^ «Лучшие телефоны Android с гироскопом и ускорителем» . AptGadget.com . 24 июня 2018 года . Проверено 9 декабря 2020 г.
- ^ «Базовые датчики в iOS» . Архивировано из оригинала 23 июля 2015 года . Проверено 23 июля 2015 г.
- ^ «Инерциальный модуль LSM9DS0 iNEMO: 3D-акселерометр, 3D-гироскоп, 3D-магнитометр — STMicroelectronics» . Архивировано из оригинала 23 июля 2015 года . Проверено 23 июля 2015 г.
- ^ Британская энциклопедия: словарь искусств, наук и общей литературы . Р. С. Пил. 1890. с. 351 . Проверено 2 декабря 2022 г.
Под названием «инструменты прецессии» в течение ряда лет использовались различные устройства, основанные на принципе гироскопа, для иллюстрации прецессии равноденствий и параллельности земной оси при ее вращении вокруг Солнца.
- ^ Хиббелер, Р.К. (2016). Инженерная механика: Динамика, четырнадцатое издание . Хобокен, Нью-Джерси: Пирсон Прентис Холл . стр. 627–629.
- ^ Браун, Гаррет. «Возвращение джедая», американский оператор , июнь 1983 года.
- ↑ « Империя грез: История трилогии «Звездных войн»» Трилогия «Звездных войн»» , [2004] DVD-диск с документальным фильмом «
- ^ Фейнман, Готлиб и Лейтон 2013 , стр. 115–135.
- ^ Фейнман, Готлиб и Лейтон 2013 , стр. 131–135.
- ^ Уильям Томсон (1875). Учеб. Лондонская математика. Соц. , том. 6, страницы 190–194.
- ^ Эндрю Грей (1979). Трактат о гиростатике и вращательном движении: теория и приложения (Дувр, Нью-Йорк)
- ^ Одно или несколько предыдущих предложений включают текст из публикации, которая сейчас находится в свободном доступе : Гринхилл, Альфред Джордж (1911). « Гироскоп и гиростат ». В Чисхолме, Хью (ред.). Британская энциклопедия . Том. 12 (11-е изд.). Издательство Кембриджского университета. п. 769. В этом источнике содержится подробное математическое обсуждение теории гироскопии.
- ^ Уильям Томсон, «Популярные лекции и обращения», Лондон: MacMillan, 1889, том. 1.
- ^ Роберт Каргон, Питер Акинштейн, барон Уильям Томсон Кельвин: «Балтиморские лекции Кельвина и современная теоретическая физика: исторические и философские перспективы» The MIT Press , 1987, ISBN 978-0-262-11117-1
- ^ E. Grekova, P. Zhilin (2001). Journal of elasticity , Springer, vol. 64, pages 29–70
- ^ Питер К. Хьюз (2004). Динамика ориентации космического корабля ISBN 0-486-43925-9
- ^ DM Harland (1997) Космическая станция МИР (Wiley); Д.М. Харланд (2005) История космической станции МИР (Спрингер).
- ^ К. Тонг (2009). Американский журнал физики, том. 77, страницы 526–537.
- ^ Н. Н. Моисеев и В. В. Румянцев (1968). Динамическая устойчивость тел, содержащих жидкость (Спрингер, Нью-Йорк)
- ^ Джозеф Лармор (1884). Учеб. Лондонская математика. Соц. полет. 15, страницы 170–184.
- ^ М. В. Тратник и Дж. Э. Сайп (1987). Физический обзор, том. 35, страницы 2965–2975.
- ^ А.Б. Глуховский (1982). Советские физические документы вып. 27, страницы 823–825.
- ^ С. Елисеев и др. (2011). Письма о физическом обзоре, том. 107, бумага 152501
- ^ Пассаро, Витторио Миннесота; Кукковильо, Антонелло; Вайани, Лоренцо; Де Карло, Мартино; Кампанелла, Карло Эдоардо (7 октября 2017 г.). «Технология и применение гироскопов: обзор с промышленной точки зрения» . Датчики (Базель, Швейцария) . 17 (10): 2284. Бибкод : 2017Senso..17.2284P . дои : 10.3390/s17102284 . ISSN 1424-8220 . ПМЦ 5677445 . ПМИД 28991175 .
- ^ Гревал, Мохиндер С. (2007). Системы глобального позиционирования, инерциальная навигация и интеграция . Лоуренс Р. Вейл, Ангус П. Эндрюс (2-е изд.). Хобокен, Нью-Джерси: Wiley-Interscience. стр. 329–331. ISBN 978-1-61583-471-6 . OCLC 663976587 .
- ^ Карта, Г.; Ньевес, MJ; Джонс, И.С.; Мовчан, Невада; Мовчан, АБ (21 октября 2019 г.). «Системы изгибной вибрации с гироскопическими вращателями» . Философские труды. Серия А. Математические, физические и технические науки . 377 (2156): 20190154. Бибкод : 2019RSPTA.37790154C . дои : 10.1098/rsta.2019.0154 . ISSN 1471-2962 . ПМЦ 6732376 . ПМИД 31474205 .
- ^ Х. Штернберг; К. Швальм (2007). «Процесс аттестации MEMS-гироскопов для использования в навигационных системах» (PDF) . Международное общество фотограмметрии и дистанционного зондирования . Архивировано из оригинала (PDF) 2 октября 2011 года.
- ^ Эш, МЭ; Трейнор, резюме; Эллиотт, доктор медицинских наук; Боренштейн, Дж. Т.; Курепенис, А.С.; Уорд, Пенсильвания; Вайнберг, М.С. (14–15 сентября 1999 г.). «Разработка микромеханического инерционного датчика в лаборатории Дрейпера с результатами последних испытаний» . Материалы симпозиума по гироскопическим технологиям . Архивировано из оригинала 23 августа 2012 года.
- ^ Линч, Д.Д.: Разработка HRG в Delco, Litton и Northrop Grumman. В: Материалы юбилейного семинара по твердотельной гироскопии, 19–21 мая 2008 г. Ялта, Украина. Киев-Харьков. ОВД Украины, ISBN 978-976-0-25248-5 (2009 г.)
- ^ Дэвид Мэй (1999). Мастен, Майкл К; Стокум, Ларри А. (ред.). «Моделирование динамически настраиваемого гироскопа для поддержки конструкции петли захвата с высокой пропускной способностью» . Учеб. ШПИОН . Обнаружение, отслеживание и наведение XIII. 3692 : 101–111. Бибкод : 1999SPIE.3692..101M . дои : 10.1117/12.352852 . S2CID 121290096 . [ постоянная мертвая ссылка ]
- ^ Дональд Маккензи, «Знание машин: очерки технических изменений» , MIT Press, 1996, Глава 4: От светоносного эфира до Боинга 757.
- ^ Эрве Лефевр, Волоконно-оптический гироскоп , 1993, Библиотека оптоэлектроники Artech House, 1993, ISBN 0-89006-537-3
- ^ Einstein.stanford.edu. Архивировано 14 мая 2011 года в Wayback Machine . «Прибор ГП-Б спроектирован измерить изменения ориентации оси вращения гироскопа с точностью более 0,5 угловых миллисекунд (1,4x10-7 градусов) за годичный период».
- ^ «Гравитационный зонд B – выдающиеся технологии» (PDF) . Архивировано из оригинала (PDF) 27 мая 2010 года . Проверено 18 января 2011 г.
- ^ «Гравитационный зонд Б – выдающиеся технологии» . Эйнштейн.stanford.edu . Архивировано из оригинала 14 мая 2011 года . Проверено 5 ноября 2017 г.
- ^ Кобаяши, Такеши; Хаякава, Хисао; Тоноучи, Масаеши (8 декабря 2003 г.). Вихревая электроника и СКВИДы . Спрингер. стр. 44–45. ISBN 9783540402312 . Архивировано из оригинала 4 сентября 2015 года.
- ^ «Система электростатической гироскопической подвески постоянного тока для эксперимента Gravity Probe B» . Исследовательские ворота . Архивировано из оригинала 5 июля 2015 года.
- ^ «Содержание курсов Учебного центра — FAA — FAASTeam — FAASafety.gov» . Faasafety.gov . Проверено 23 апреля 2021 г.
- ^ «Гироскопическая прецессия» . Блог.aopa.org . 11 октября 2020 г. Проверено 23 апреля 2021 г.
- ^ Музей, Лейн Мотор. «Гиро-Х-1967» . Лейнский моторный музей . Проверено 23 апреля 2021 г.
- ^ «Samsung Galaxy и Gear – Официальный сайт Samsung Galaxy» . Официальный сайт Samsung Galaxy . Архивировано из оригинала 16 декабря 2014 года.
- ^ «Характеристики и возможности HTC Titan – Techstic» . 18 октября 2011 года. Архивировано из оригинала 3 октября 2012 года . Проверено 6 мая 2012 г.
- ^ «Nexus 5 против iPhone 5s: противостояние – SiliconANGLE» . Siliconangle.com . 1 ноября 2013 года. Архивировано из оригинала 13 декабря 2013 года . Проверено 5 ноября 2017 г.
- ^ «Nokia 808 PureView – полные характеристики телефона» . Gsmarena.com . Архивировано из оригинала 20 марта 2012 года.
- ^ «Блог — Создание датчика для виртуальной реальности с малой задержкой» . Окулус.com . Архивировано из оригинала 8 марта 2015 года . Проверено 5 ноября 2017 г.
- ^ Фрэнк Кэрон (август 2008 г.). О гироскопах и играх: технология Wii MotionPlus Компания также использовала гироскопы в контроллерах Nintendo Switch Joy-Con . Архивировано 15 апреля 2012 года в Wayback Machine , ars technica.
- ^ Сэндлер, Кори (2005). Econoguide Cruises 2006: Круизы по Карибскому морю, Гавайям, Новой Англии, Аляске и Европе (4-е, иллюстрированное изд.). Глобус Пекот Пресс. п. 1. ISBN 978-0-7627-3871-7 .
- ^ Адамс, Пол (29 сентября 2009 г.). «Внутренний гироскоп — будущее тренировочных колес» . Популярная наука . Архивировано из оригинала 27 июля 2016 года . Проверено 18 октября 2017 г.
- ^ Март 2020 г., Кевин Карботт 18 (18 марта 2020 г.). «Обзор гарнитуры HTC Vive Cosmos VR: надежное обновление» . Аппаратное обеспечение Тома . Проверено 2 апреля 2020 г.
{{cite web}}: CS1 maint: числовые имена: список авторов ( ссылка )
Ссылки [ править ]
- Фейнман, Ричард; Готлиб, Майкл; Лейтон, Ральф (2013). Советы Фейнмана по физике, дополнение к фейнмановским лекциям по физике для решения задач . Основные книги.
Дальнейшее чтение [ править ]
- Феликс Клейн и Арнольд Зоммерфельд , « О теории гироскопа » (Тр., О теории гироскопа). Лейпциг, Берлин, Б. Г. Тойбнер, 1898–1914. 4 г. до н. э. илл. 25 см.
- Оден, М. Волчки: курс интегрируемых систем . Нью-Йорк: Издательство Кембриджского университета, 1996.
- Крэбтри, Х. «Элементарное рассмотрение теории волчков и гироскопического движения». Лонгман, Грин и К.), 1909. Перепечатано Мичиганской серией исторических переизданий.
- Материалы юбилейного семинара по твердотельной гироскопии, 19–21 мая 2008 г. Ялта, Украина. Киев-Харьков. ОВД Украины, ISBN 978-976-0-25248-5 (2009 г.)
- Э. Лейманис (1965). Общая задача о движении связанных твердых тел вокруг неподвижной точки . (Спрингер, Нью-Йорк).
- Перри Дж. «Волчки». Лондонское общество распространения христианских знаний, 1870 г. Перепечатано электронной книгой Project Gutemberg, 2010 г.
- Уолтер Ригли, Уолтер М. Холлистер и Уильям Г. Денхард (1969). Гироскопическая теория, конструкция и приборостроение. (MIT Press, Кембридж, Массачусетс).
- Купер, Дональд и Университет Западной Австралии. Кафедра машиностроения и материаловедения, 1996 г., Исследование применения гироскопического крутящего момента при ускорении и замедлении вращающихся систем.
Внешние ссылки [ править ]
- Рождественская лекция Королевского института 1974–1975 годов, профессор Эрик Лэйтуэйт
- Одноколесный робот-гиростат Ольги Капустиной и Юрия Мартыненко Демонстрационный проект Wolfram
- Апостолюк В. Теория и конструкция микромеханических вибрационных гироскопов.