Рука Ляппы
Вы можете помочь дополнить эту статью текстом, переведенным из соответствующей статьи на русском языке . (Июль 2021 г.) Нажмите [показать], чтобы просмотреть важные инструкции по переводу. |


Рука Ляппа ( (или Льяппа ), официально , латинизированная : Автоматическая система перестыковки (АСПр) система перестыковки Автоматическая АСПР) ), была роботизированной рукой, использовавшейся во время сборки советской/российской космической станции. Мир . Каждый из модулей «Квант-2» , «Кристалл» , «Спектр» и «Природа» был оснащен одним из таких рычагов, который после стыковки модуля с передним (или осевым) портом модуля «Мир» захватывал одно из двух приспособлений, расположенных на Модуль-концентратор основного модуля. Затем главный стыковочный зонд модуля был втянут, а рычаг поднял модуль так, чтобы его можно было повернуть на 90 градусов для стыковки с одним из четырех радиальных стыковочных портов. [ 1 ] [ 2 ] [ 3 ]
Аналогичным образом, в модуле «Причал» будут размещены грейферные приспособления для перестыковки будущих модулей, пристыкованных к нему из одного порта в другой, с использованием прикрепляемой к этим модулям манипулятора «Ляппа», если это необходимо.
Оба Вэньтянь и Мэнтянь модуля космической станции Тяньгун оснащены вооружением, позволяющим им маневрировать вокруг стыковочного узла основного модуля Тяньхэ . Механическая рука, получившая название «Индексирующая роботизированная рука», которая похожа на руку Лиаппы, позволила им пристыковаться к радиальному порту CCM. [ 4 ] Он отличается от Ляппы тем, что работает по другому механизму. Рука Ляппы нужна для управления тангажем корабля и перестыковки в другой плоскости. Тогда как индексирующий робот-манипулятор необходим для стыковки в одной плоскости. В дополнение к этому рычагу, используемому для перемещения стыковки, модуль Chinaarm на Тяньхэ также может использоваться в качестве резервного. [ 5 ] [ 6 ]
Мы
[ редактировать ]Слова «Ляппа» в русском языке не существует. Вероятно, это искажение русского языка : лапа , латинизированное : лапа , букв. 'лапа'.
Принципиально новым элементом в этой операции является манипулятор перестыковки. Иногда мы называли это просто «лапа», так было понятнее. Эта электромеханическая рука, короткая и мощная, действительно напоминала лапу сибирского медведя, отсюда и ее название.
Галерея
[ редактировать ]-
 Кронштейн Ляппы и приспособление для крепления на Мире
Кронштейн Ляппы и приспособление для крепления на Мире -
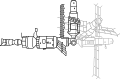
 Рука Ляппы в музее РКК "Энергия"
Рука Ляппы в музее РКК "Энергия" -
 Схема, показывающая, как рука использовалась для перемещения «Кванта-2» .
Схема, показывающая, как рука использовалась для перемещения «Кванта-2» . -
 Схема, показывающая движение тормоза «Конус» и модулей вокруг «Мира». стыковочного узла
Схема, показывающая движение тормоза «Конус» и модулей вокруг «Мира». стыковочного узла




Ссылки
[ редактировать ]- ^ Дэвид Харланд (30 ноября 2004 г.). История космической станции «Мир» . Нью-Йорк: Springer-Verlag New York Inc. ISBN 978-0-387-23011-5 .
- ^ Портрет Дэвида С.Ф. (март 1995 г.). Мир Аппаратное Наследие . НАСА.
- ^ «Архивная копия» (PDF) . Архивировано из оригинала (PDF) 15 октября 2011 г. Проверено 11 февраля 2012 г.
{{cite web}}: CS1 maint: архивная копия в заголовке ( ссылка ) - ^ Грэм, Уильям; Гебхардт, Крис (28 апреля 2021 г.). «Китай готовится к запуску модуля Тяньхэ, что является началом амбициозных двухлетних проектов по строительству станции» . NASASpaceflight.com.
Это означает, что два будущих научных модуля, Вэньтянь («В поисках небес») и Мэнтянь («Мечты о небесах»), не смогут напрямую состыковаться с запланированными радиальными портами. [...] Чтобы учесть это, каждый модуль будет оснащен российским роботизированным манипулятором «Ляппа» — подобным тем, которые используются на «Мире» для той же цели — для перемещения модуля из переднего порта в соответствующее постоянное место в радиальном порту Тяньхэ. док-концентратор.
- ^ Хун Ян (2020). Технологии пилотируемых космических кораблей . Китай: Спрингер. п. 355. ИСБН 978-9811548970 .
- ^ Грэм, Уильям; Гебхардт, Крис (28 апреля 2021 г.). «Китай готовится к запуску модуля Тяньхэ, что является началом амбициозных двухлетних проектов по строительству станции» . NASASpaceflight.com.
- ^ Сыромятников 2010 , pp. 189–197, Перестыковка: как часовой механизм.
Дальнейшее чтение
[ редактировать ]- Производство промышленных роботизированных манипуляторов
- Сыромятников, Владимир (2010). 100 рассказов о стыковке. Часть 2 (in Russian). М.: Университетская книга Логос. ISBN 978-5-98704-455-1 .
Компоненты Мира |
|---|

Эта статья об одном или нескольких космических кораблях Российской Федерации — незавершенная . Вы можете помочь Википедии, расширив ее . |
Эта статья, посвященная робототехнике, незавершена . Вы можете помочь Википедии, расширив ее . |