Мобильный робот Хепера

В этой статье используются поверхностные ссылки на домашнюю страницу или другую страницу высокого уровня веб-сайта, содержащую цитируемый документ. ( июль 2021 г. ) |
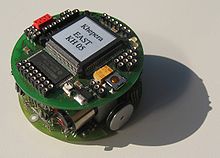
Khepera , — небольшой (5,5 см) с дифференциальными колесами мобильный робот , который был разработан в лаборатории LAMI профессора Жана-Даниэля Никуда в EPFL ( Лозанна Швейцария) в середине 1990-х годов. Он был разработан Эдо. Франци, Франческо Мондада , Андре Гиньяр и другие.
Маленький, быстрый и построенный на базе Motorola 68331, он служит исследователям уже 10 лет и широко используется более чем в 500 университетах. [ нужна ссылка ] во всем мире.
Научное влияние
[ редактировать ]Хепера была продана тысяче исследовательских лабораторий и изображена на обложке номера журнала Nature от 31 августа 2000 года . [1] [ нужна полная цитата ] Оно снова появилось в статье 2003 года. [2]
Хеперы способствовали появлению эволюционной робототехники . [ нужна ссылка ]
Технические детали
[ редактировать ]Оригинальная версия
[ редактировать ]- Диаметр: 55 мм
- Высота: 30 мм
- Пустой вес: 80 г
- Скорость: от 0,02 до 1,0 м/с.
- Автономность: 45 минут в движении
- Процессор Motorola 68331 @ 16 МГц
- 256 КБ ОЗУ
- 512 КБ ЭСППЗУ
- Запуск μKOS RTOS
- 2 коллекторных серводвигателя постоянного тока с инкрементальными энкодерами
- 8 инфракрасных датчиков приближения и внешней освещенности (SFH900)
Версия 2.0
[ редактировать ]- Процессор Motorola 68331 @ 25 МГц
- 512 КБ ОЗУ
- 512 КБ флэш-памяти
- Улучшенные батареи и датчики
Версия 4
[ редактировать ]- Процессор ARM Cortex-A8 800 МГц
- Вес: 540 г
- 256 МБ ОЗУ
- 512 МБ плюс дополнительно 8 ГБ для данных
- Батарея: литий-полимерная, 7,4 В, 3400 мАч.
Расширения
[ редактировать ]Для Хеперы существует несколько дополнительных турелей, в том числе:
- захват
- 1D или 2D камера, проводная или беспроводная
- Радиоизлучатель/приемник, низкая и высокая скорость
- я/0
См. также
[ редактировать ]Webots - программное обеспечение, которое моделирует и позволяет осуществлять кросс-компиляцию и удаленное управление Хеперой и другими роботами.
Ссылки
[ редактировать ]- ^ «Том 406, выпуск 6799, 31 августа 2000 г.» . Nature.com . 31 августа 2000 года . Проверено 14 июля 2021 г.
- ^ Вершур, Пол FMJ; Фогтлин, Томас; Дуглас, Родни Дж. (октябрь 2003 г.). «Экологически опосредованная синергия между восприятием и поведением мобильных роботов» . Природа . 425 (6958): 620–624. Бибкод : 2003Natur.425..620V . дои : 10.1038/nature02024 . ISSN 1476-4687 . ПМИД 14534588 . S2CID 4418697 .
- Примечания
- Мондада Ф. , Франци Э. , Гиньяр А. (1999), Развитие Хеперы . Материалы Первого международного семинара Хепера, Падерборн, 10–11 декабря 1999 г. PDF BibTex. Архивировано 6 июля 2011 г. на сайте Wayback Machine, EPFL Infoscience.
Внешние ссылки
[ редактировать ]- Домашняя страница – K-Team, компания, продающая роботов Khepera.