Уравнение коллинеарности
Эта статья нуждается в дополнительных цитатах для проверки . ( сентябрь 2009 г. ) |
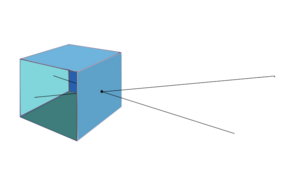
Уравнения коллинеарности представляют собой набор двух уравнений, используемых в фотограмметрии и компьютерном стереозрении для связи координат в плоскости датчика (в двух измерениях) с координатами объекта (в трех измерениях). Уравнения возникают из центральной проекции точки объекта через оптический центр камеры . на изображение на плоскости датчика [1]


Определение
[ редактировать ]Пусть x, y и z относятся к системе координат с осями x и y в плоскости датчика. Обозначим координаты точки P на объекте через , координаты точки изображения P на плоскости датчика через x и y и координаты проекционного (оптического) центра через . Как следствие метода проекции существует то же фиксированное соотношение между и , и , а расстояние центра проекции до плоскости датчика и . Следовательно:












Решение для в последнем уравнении и введя его в остальные, получим:


Точка P обычно задается в некоторой системе координат «вне» камеры координатами X , Y и Z , а центр проекции — . Эти координаты могут быть преобразованы посредством вращения и перевода в систему камеры. Перевод не влияет на разницу координат, а вращение, часто называемое преобразованием камеры , задается матрицей R 3×3 , преобразующей в:




и

Замена этих выражений приводит к системе двух уравнений, известных как уравнения коллинеарности :


Наиболее очевидное использование этих уравнений — для изображений, записанных камерой. В этом случае уравнение описывает преобразования пространства объекта (X, Y, Z) в координаты изображения (x, y). Он формирует основу для уравнений, используемых при корректировке пакета . Они указывают на то, что точка изображения (на сенсорной пластине камеры), наблюдаемая точка (на объекте) и центр проекции камеры были совмещены при съемке изображения.