Система координат
В геометрии система координат — это система, которая использует одно или несколько чисел или координат для однозначного определения положения точек таком или других геометрических элементов на многообразии, как евклидово пространство . [1] [2] Порядок координат имеет значение, и иногда они идентифицируются по положению в упорядоченном кортеже , а иногда по букве, как в « координате x ». координаты считаются действительными числами В элементарной математике , но могут быть комплексными числами или элементами более абстрактной системы, такой как коммутативное кольцо . Использование системы координат позволяет переводить задачи геометрии в задачи о числах и наоборот ; это основа аналитической геометрии . [3]
Общие системы координат [ править ]
Числовая строка [ править ]
Простейшим примером системы координат является отождествление точек на прямой с действительными числами с помощью числовой прямой . произвольная точка О ( начало координат В этой системе на заданной прямой выбирается ). Координата точки P определяется как расстояние со знаком от O до P линия P. , где расстояние со знаком — это расстояние, принимаемое как положительное или отрицательное в зависимости от того, с какой стороны лежит Каждой точке присвоена уникальная координата, а каждое действительное число является координатой уникальной точки. [4]

Декартова система координат [ править ]


Прототипическим примером системы координат является декартова система координат . В плоскости выбираются две перпендикулярные прямые, а в качестве координат точки принимаются расстояния до прямых со знаком. [5] В трех измерениях выбираются три взаимно ортогональные плоскости, а три координаты точки представляют собой расстояния со знаком до каждой из плоскостей. [6] Это можно обобщить, чтобы создать n координат для любой точки n -мерного евклидова пространства.
В зависимости от направления и порядка осей координат трехмерная система может быть правосторонней или левосторонней.
Полярная система координат [ править ]
Другая распространенная система координат плоскости — полярная система координат . [7] выбирается точка В качестве полюса , а луч из этой точки принимается в качестве полярной оси . Для данного угла θ через полюс проходит единственная линия, угол которой с полярной осью равен θ (измеряется против часовой стрелки от оси до линии). Тогда на этой линии существует единственная точка, расстояние от начала координат которой со знаком равно r для заданного числа r . Для данной пары координат ( r , θ ) существует одна точка, но любая точка представлена многими парами координат. Например, ( r , θ ), ( r , θ +2 π ) и (− r , θ + π ) являются полярными координатами одной и той же точки. Полюс представлен (0, θ ) для любого значения θ .
Цилиндрическая и сферическая системы координат [ править ]

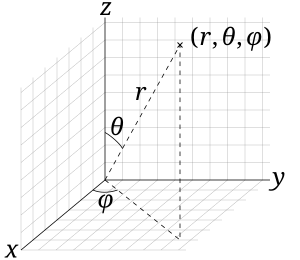
Существует два распространенных метода расширения полярной системы координат до трех измерений. В цилиндрической системе координат к давая тройку добавляется координата z с тем же значением, что и в декартовых координатах, полярным координатам r и θ ( r , θ , z ). [8] Сферические координаты идут еще дальше, преобразуя пару цилиндрических координат ( r , z ) в полярные координаты ( ρ , φ ), давая тройку ( ρ , θ , φ ). [9]
Однородная система координат [ править ]
Точка на плоскости может быть представлена в однородных координатах тройкой ( x , y , z ), где x / z и y / z — декартовы координаты точки. [10] Это вводит «дополнительную» координату, поскольку для указания точки на плоскости необходимы только две, но эта система полезна тем, что она представляет любую точку на проективной плоскости без использования бесконечности . В общем, однородная система координат — это система, в которой важны только отношения координат, а не фактические значения.
системы используемые часто Другие
Некоторые другие распространенные системы координат:
- Криволинейные координаты являются обобщением систем координат вообще; система основана на пересечении кривых.
- Ортогональные координаты : координатные поверхности встречаются под прямым углом.
- Наклон координат : координатные поверхности не ортогональны.
- Лог -полярная система координат представляет точку на плоскости как логарифм расстояния от начала координат и угла, измеренного от опорной линии, пересекающей начало координат.
- Координаты Плюккера — это способ представления линий в трехмерном евклидовом пространстве с использованием набора из шести чисел в качестве однородных координат .
- Обобщенные координаты используются в лагранжевой трактовке механики.
- Канонические координаты используются в гамильтоновой трактовке механики.
- Барицентрическая система координат , используемая для троичных графиков и, в более общем плане, при анализе треугольников .
- Трилинейные координаты используются в контексте треугольников.
Существуют способы описания кривых без координат с использованием внутренних уравнений , в которых используются инвариантные величины, такие как кривизна и длина дуги . К ним относятся:
- Уравнение Уэвелла связывает длину дуги и тангенциальный угол .
- Уравнение Чезаро связывает длину и кривизну дуги.
Координаты геометрических объектов [ править ]
Системы координат часто используются для указания положения точки, но их также можно использовать для указания положения более сложных фигур, таких как линии, плоскости, круги или сферы . Например, координаты Плюкера используются для определения положения линии в пространстве. [11] При необходимости тип описываемой фигуры используется для различения типа системы координат, например термин координаты линии используется для любой системы координат, задающей положение линии.
Может оказаться, что системы координат для двух разных наборов геометрических фигур эквивалентны с точки зрения их анализа. Примером этого являются системы однородных координат точек и прямых на проективной плоскости. Две системы в таком случае называются дуалистическими . Дуалистические системы обладают тем свойством, что результаты одной системы могут быть перенесены в другую, поскольку эти результаты представляют собой лишь разные интерпретации одного и того же аналитического результата; это известно как принцип двойственности . [12]
Трансформации [ править ]
Часто существует множество различных возможных систем координат для описания геометрических фигур. Взаимосвязь между различными системами описывается преобразованиями координат , которые дают формулы координат в одной системе через координаты в другой системе. Например, на плоскости, если декартовы координаты ( x , y ) и полярные координаты ( r , θ ) имеют одно и то же начало, а полярная ось является положительной осью x , то преобразование координат из полярных в декартовы координаты задается формулой Икс знак равно р потому что θ и y знак равно р грех θ .
С каждой биекцией пространства в себя могут быть связаны два преобразования координат:
- Такие, чтобы новые координаты изображения каждой точки были такими же, как старые координаты исходной точки (формулы отображения обратны формулам преобразования координат)
- Такого, чтобы старые координаты изображения каждой точки совпадали с новыми координатами исходной точки (формулы отображения те же, что и для преобразования координат)
Например, в 1D , если отображение представляет собой перевод 3 вправо, первое перемещает начало координат от 0 до 3, так что координата каждой точки становится на 3 меньше, а второе перемещает начало координат от 0 до -3. , так что координата каждой точки станет на 3 больше.
Координатные линии/кривые и плоскости/поверхности [ править ]
Учитывая систему координат, если одна из координат точки изменяется, а другие координаты остаются постоянными, то результирующая кривая называется координатной кривой . Если координатная кривая представляет собой прямую линию , она называется координатной линией . Система координат, для которой некоторые координатные кривые не являются прямыми, называется криволинейной системой координат . [13]
Координатная линия, у которой все постоянные координаты равны нулю, называется координатной осью .
В декартовой системе координат все координатные кривые представляют собой линии, и, следовательно, координатных осей столько же, сколько и координат. При этом оси координат попарно ортогональны .
Полярная система координат — это криволинейная система, в которой координатные кривые представляют собой линии или круги . Однако одна из координатных кривых сводится к одной точке — началу координат, которое часто рассматривают как окружность нулевого радиуса. Точно так же сферические и цилиндрические системы координат имеют координатные кривые, которые представляют собой линии, круги или круги нулевого радиуса.
Многие кривые могут представлять собой координатные кривые. Например, координатные кривые параболических координат являются параболами .

В трехмерном пространстве, если одна координата остается постоянной, а две другие могут изменяться, то полученная поверхность называется координатной поверхностью . Например, координатные поверхности, полученные при сохранении постоянного ρ в сферической системе координат, представляют собой сферы с центром в начале координат. В трехмерном пространстве пересечение двух координатных поверхностей представляет собой координатную кривую. В декартовой системе координат мы можем говорить о координатных плоскостях .
Точно так же координатные гиперповерхности представляют собой ( n - 1) -мерные пространства, возникающие в результате фиксации одной координаты n -мерной системы координат. [14]
Карты координат [ править ]
Понятие координатной карты или координатной карты занимает центральное место в теории многообразий. Карта координат — это, по сути, система координат для подмножества данного пространства, обладающая тем свойством, что каждая точка имеет ровно один набор координат. Точнее, координатное отображение — это гомеоморфизм открытого подмножества пространства X в открытое подмножество пространства R. н . [15] Часто невозможно обеспечить одну согласованную систему координат для всего пространства. В этом случае набор карт координат объединяется в атлас, охватывающий пространство. Пространство, оснащенное таким атласом, называется многообразием , и на многообразии можно определить дополнительную структуру, если структура непротиворечива там, где карты координат перекрываются. Например, дифференцируемое многообразие — это многообразие, в котором переход координат от одной координатной карты к другой всегда является дифференцируемой функцией.
Координаты на основе ориентации [ править ]
В геометрии и кинематике системы координат используются для описания (линейного) положения точек и углового положения осей, плоскостей и твердых тел . [16] В последнем случае ориентация второй (обычно называемой «локальной») системы координат, прикрепленной к узлу, определяется на основе первой (обычно называемой «глобальной» или «мировой» системой координат). Например, ориентация твердого тела может быть представлена матрицей ориентации , которая включает в себя в трех столбцах декартовы координаты трех точек. Эти точки используются для определения ориентации осей локальной системы; они представляют собой кончики трех единичных векторов, выровненных по этим осям.
Географические системы [ править ]
Земля в целом представляет собой одно из наиболее распространенных геометрических пространств, требующих точного измерения местоположения и, следовательно, систем координат. Начиная с греков эллинистического периода , на основе вышеперечисленных типов были разработаны различные системы координат, в том числе:
- Географическая система координат , сферические координаты широты . и долготы
- Проецируемые системы координат , включая тысячи декартовых систем координат , каждая из которых основана на картографической проекции для создания плоской поверхности мира или региона.
- Геоцентрическая система координат — трехмерная декартова система координат , которая моделирует Землю как объект и чаще всего используется для моделирования орбит спутников , включая глобальную систему позиционирования и другие спутниковые навигационные системы.
См. также [ править ]
- Абсолютный угловой момент
- Буквенно-цифровая сетка
- Соглашения об осях в машиностроении
- Небесная система координат
- без координат
- Дробные координаты
- Система отсчета
- преобразование Галилея
- Ссылка на сетку
- Номограмма , графическое изображение различных систем координат.
- Справочная система
- Вращение осей
- Перевод осей
Релятивистские системы координат [ править ]
Ссылки [ править ]
Цитаты [ править ]
- ^ Вудс с. 1
- ^ Вайсштейн, Эрик В. «Система координат» . Математический мир .
- ^ Вайсштейн, Эрик В. «Координаты» . Математический мир .
- ^ Стюарт, Джеймс Б .; Редлин, Лотар; Уотсон, Салим (2008). Колледж алгебры (5-е изд.). Брукс Коул . стр. 13–19. ISBN 978-0-495-56521-5 .
- ^ Антон, Ховард; Бивенс, Ирландия К.; Дэвис, Стивен (2021). Исчисление: многомерное . Джон Уайли и сыновья . п. 657. ИСБН 978-1-119-77798-4 .
- ^ Мун П., Спенсер Д.Э. (1988). «Прямоугольные координаты (x, y, z)». Справочник по теории поля, включая системы координат, дифференциальные уравнения и их решения (исправленное 2-е, 3-е печатные изд.). Нью-Йорк: Springer-Verlag. С. 9–11 (табл. 1.01). ISBN 978-0-387-18430-2 .
- ^ Финни, Росс; Джордж Томас; Франклин Демана; Берт Уэйтс (июнь 1994 г.). Исчисление: графическое, числовое, алгебраическое (изд. Версия с одной переменной). Addison-Wesley Publishing Co. ISBN издательства 0-201-55478-Х .
- ^ Маргенау, Генри ; Мерфи, Джордж М. (1956). Математика физики и химии . Нью-Йорк: Д. ван Ностранд. п. 178 . ISBN 978-0-88275-423-9 . LCCN 55010911 . ОСЛК 3017486 .
- ^ Морс, Премьер-министр ; Фешбах, Х (1953). Методы теоретической физики . Часть I. Нью-Йорк: МакГроу-Хилл. п. 658. ИСБН 0-07-043316-Х . LCCN 52011515 .
- ^ Джонс, Альфред Клемент (1912). Введение в алгебраическую геометрию . Кларендон.
- ^ Ходж, Западная Вирджиния ; Д. Педо (1994) [1947]. Методы алгебраической геометрии, том I (книга II) . Издательство Кембриджского университета . ISBN 978-0-521-46900-5 .
- ^ Вудс с. 2
- ^ Тан, КТ (2006). Математические методы для инженеров и ученых . Том. 2. Спрингер. п. 13. ISBN 3-540-30268-9 .
- ^ Лисейкин, Владимир Дмитриевич (2007). Вычислительный подход дифференциальной геометрии к созданию сеток . Спрингер. п. 38. ISBN 978-3-540-34235-9 .
- ^ Манкрес, Джеймс Р. (2000) Топология . Прентис Холл. ISBN 0-13-181629-2 .
- ^ Ханспетер Шауб ; Джон Л. Джанкинс (2003). «Кинематика твердого тела» . Аналитическая механика космических систем . Американский институт аэронавтики и астронавтики. п. 71. ИСБН 1-56347-563-4 .
Источники [ править ]
- Войцеховский, М.И.; Иванов, А.Б. (2001) [1994], «Координаты» , Энциклопедия Математики , EMS Press
- Вудс, Фредерик С. (1922). Высшая геометрия . Джинн и Ко, стр. 1 и далее.
- Сигэюки Морита; Теруко Нагасе; Номидзу (2001). Книжный магазин AMS. Кацуми 0-8218-1045-6 .