Кинематика
| Часть серии о |
| Классическая механика |
|---|

Кинематика — раздел физики и математики , развитый в классической механике , который описывает движение точек, тел (объектов) и систем тел (групп объектов) без учета сил, вызывающих их движение. [1] [2] [3] Кинематику как область исследования часто называют «геометрией движения» и иногда рассматривают как раздел как прикладной, так и чистой математики , поскольку ее можно изучать, не принимая во внимание массу тела или действующие на него силы. . [4] [5] [6] Задача кинематики начинается с описания геометрии системы и объявления начальных условий любых известных значений положения, скорости и/или ускорения точек внутри системы. Затем, используя аргументы геометрии, можно определить положение, скорость и ускорение любых неизвестных частей системы. Изучение того, как силы действуют на тела, относится к кинетике , а не кинематике. Более подробную информацию см. в разделе «Аналитическая динамика» .
Кинематика используется в астрофизике для описания движения небесных тел и совокупностей таких тел. В машиностроении , робототехнике и биомеханике . [7] кинематика используется для описания движения систем, состоящих из соединенных частей (многозвенных систем), таких как двигатель , роботизированная рука или человеческий скелет .
Геометрические преобразования, также называемые жесткими преобразованиями , используются для описания движения компонентов в механической системе , упрощая вывод уравнений движения. Они также играют центральную роль в динамическом анализе .
Кинематический анализ — это процесс измерения кинематических величин, используемых для описания движения. В технике, например, кинематический анализ может использоваться для определения диапазона движения данного механизма и, работая в обратном направлении, с использованием кинематического синтеза для проектирования механизма для желаемого диапазона движения. [8] Кроме того, кинематика применяет алгебраическую геометрию для изучения механических преимуществ механической системы или механизма.
Этимология [ править ]
Термин «кинематика» — это английская версия термина А. М. Ампера » «кинематика . [9] который он построил от греческого κίνημα kinema («движение, движение»), которое само происходит от κινεῖν kinein («двигаться»). [10] [11]
Kinematic и cinématique связаны с французским словом cinéma, но не являются производными от него напрямую. Однако у них есть общий корень, поскольку кино произошло от сокращенной формы слова cinématographe, «кинопроектор и камера», опять-таки от греческого слова, обозначающего движение, и от греческого ( γρᾰ́φωgrapho «писать»). [12]
Кинематика траектории частицы в невращающейся системе отсчета [ править ]




Кинематика частиц - это изучение траектории частиц. Положение частицы определяется как вектор координат от начала системы координат до частицы. Например, рассмотрим башню в 50 м к югу от вашего дома, где центр системы координат находится в вашем доме, так что восток находится в направлении оси X , а север - в направлении оси Y , тогда координата вектор к основанию башни равен r = (0 м, −50 м, 0 м). Если высота башни 50 м и эта высота измеряется по оси z , то вектор координат вершины башни равен r = (0 м, −50 м, 50 м).
В самом общем случае для определения положения частицы используется трехмерная система координат. Однако, если частица вынуждена двигаться внутри плоскости, достаточно двумерной системы координат. Все наблюдения в физике неполны, если они не описаны относительно системы отсчета.
Вектор положения частицы — это вектор, проведенный от начала системы отсчета до частицы. Он выражает как расстояние точки от начала координат, так и ее направление от начала координат. В трех измерениях вектор положения может быть выражено как











Траектория , частицы является векторной функцией времени , который определяет кривую, по которой движется движущаяся частица, определяемая выражением





Скорость и скорость [ править ]
Скорость , частицы — это векторная величина, которая описывает как направление так и величину движения частицы. С математической точки зрения, скорость изменения вектора положения точки по отношению ко времени — это скорость точки. Рассмотрим соотношение, образующееся при делении разницы двух положений частицы ( перемещения ) на интервал времени. Это отношение называется средней скоростью за этот интервал времени и определяется как




Скорость . объекта – это величина его скорости Это скалярная величина:



Ускорение [ править ]
Вектор скорости может изменяться по величине и направлению или по тому и другому одновременно. Следовательно, ускорение учитывает как скорость изменения величины вектора скорости, так и скорость изменения направления этого вектора. Те же рассуждения, которые использовались в отношении положения частицы для определения скорости, могут быть применены к скорости для определения ускорения. Ускорение частицы — это вектор , определяемый скоростью изменения вектора скорости. Среднее ускорение частицы за интервал времени определяется как соотношение.

Ускорение частицы является пределом среднего ускорения, когда временной интервал приближается к нулю, что является производной по времени,

Альтернативно,

Таким образом, ускорение — это первая производная вектора скорости и вторая производная вектора положения этой частицы. В невращающейся системе отсчета производные координатных направлений не рассматриваются, поскольку их направления и величины являются постоянными.
Величина ускорения объекта равна величине | а | вектора его ускорения. Это скалярная величина:

Вектор относительного положения [ править ]
Вектор относительного положения — это вектор, который определяет положение одной точки относительно другой. Это разница в положении двух точек.Положение одной точки А относительно другой точки В — это просто разница между их положениями.

что представляет собой разницу между компонентами их векторов положения.
Если точка А имеет компоненты положения

и точка B имеет компоненты положения

тогда положение точки А относительно точки В есть разность их составляющих:

Относительная скорость [ править ]
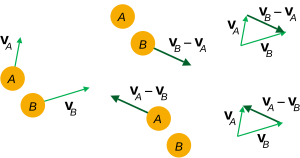
Скорость одной точки относительно другой — это просто разность их скоростей.

Если точка А имеет компоненты скорости и точка B имеет компоненты скорости тогда скорость точки А относительно точки В равна разности их составляющих:



Альтернативно, тот же самый результат может быть получен путем вычисления производной по времени вектора относительного положения r B/A .
Относительное ускорение [ править ]
Ускорение одной точки C относительно другой точки B — это просто разность их ускорений.

Если точка C имеет компоненты ускорения и точка B имеет компоненты ускорения тогда ускорение точки С относительно точки В равно разности их составляющих:



Альтернативно, тот же самый результат может быть получен путем вычисления второй производной по времени вектора относительного положения r B/A . [13]
Полагая, что начальные условия положения, , и скорость во время известны, первое интегрирование дает скорость частицы как функцию времени. [а]




Второе интегрирование дает его путь (траекторию),

Можно вывести дополнительные зависимости между перемещением, скоростью, ускорением и временем. Поскольку ускорение постоянно,


Взаимосвязь между скоростью, положением и ускорением без явной зависимости от времени можно получить, решив среднее ускорение для времени, заменив и упростив




Скалярное произведение можно заменить косинусом угла α между векторами (более подробную информацию см . в разделе «Геометрическая интерпретация скалярного произведения ») и векторами по их величинам, и в этом случае:

В случае ускорения всегда в направлении движения, а направление движения должно быть положительным или отрицательным, угол между векторами ( α ) равен 0, поэтому , и





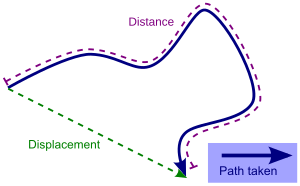
Это сводит параметрические уравнения движения частицы к декартовой зависимости скорости от положения. Это соотношение полезно, когда время неизвестно. Мы также знаем, что или – площадь под графиком скорость-время. [15]


Мы можем взять добавив верхнюю и нижнюю области. Нижняя область представляет собой прямоугольник, а площадь прямоугольника — это где это ширина и это высота. В этом случае и ( здесь отличается от ускорения ). Это означает, что нижняя область . Теперь найдем верхнюю область (треугольник). Площадь треугольника равна где является основой и это высота. [16] В этом случае, и или . Добавление и приводит к уравнению приводит к уравнению . [17] Это уравнение применимо, когда конечная скорость v неизвестна.















- координатах Траектории частиц в цилиндрическо полярных
Часто бывает удобно сформулировать траекторию частицы r ( t ) = ( x ( t ), y ( t ), z ( t )) с использованием полярных координат в X – Y. плоскости В этом случае его скорость и ускорение принимают удобный вид.
Напомним, что траектория частицы P определяется ее вектором координат r, в фиксированной системе отсчета F. измеренным Когда частица движется, ее координатный вектор r ( t ) отслеживает ее траекторию, которая представляет собой кривую в пространстве, определяемую формулой:
Рассмотрим частицу P , которая движется только по поверхности круглого цилиндра r ( t ) = константа, можно совместить ось z неподвижной системы координат F с осью цилиндра. Затем угол θ вокруг этой оси в плоскости x – y можно использовать для определения траектории как:

Цилиндрические координаты для r ( t ) можно упростить, введя радиальные и тангенциальные единичные векторы:





Используя эти обозначения, r ( t ) принимает форму:



Аналогично, ускорение a P , которое является производной скорости v P по времени , определяется выражением:

Термин действует по направлению к центру кривизны траектории в этой точке траектории, обычно называется центростремительным ускорением . Термин называется ускорением Кориолиса .


Постоянный радиус [ править ]
Если траектория частицы ограничена цилиндром, то радиус r постоянен, а векторы скорости и ускорения упрощаются. Скорость v P — это производная по времени траектории r ( t ),

Плоские круговые траектории [ править ]
Частный случай траектории частицы по круговому цилиндру возникает при отсутствии движения вдоль оси z :



Ускорение a P частицы P теперь определяется выражением:

Компоненты

Обозначения угловой скорости и углового ускорения часто определяются как


Траектории точек в теле, движущемся в плоскости [ править ]
Движение компонентов механической системы анализируется путем прикрепления системы отсчета к каждой части и определения того, как различные системы отсчета движутся относительно друг друга. Если конструктивная жесткость деталей достаточна, то их деформацией можно пренебречь и для определения этого относительного перемещения использовать жесткие преобразования. Это сводит описание движения различных частей сложной механической системы к задаче описания геометрии каждой части и геометрической связи каждой части относительно других частей.
Геометрия — это изучение свойств фигур, которые остаются неизменными, пока пространство трансформируется различными способами; более технически, это изучение инвариантов при ряде преобразований. [19] Эти преобразования могут вызвать смещение треугольника в плоскости, оставив при этом угол при вершине и расстояния между вершинами неизменными. Кинематику часто называют прикладной геометрией, где движение механической системы описывается с помощью жестких преобразований евклидовой геометрии.
Координаты точек на плоскости представляют собой двумерные векторы в R 2 (двумерное пространство). Жесткие преобразования — это преобразования, сохраняющие расстояние между любыми двумя точками. Множество жестких преобразований в n -мерном пространстве называется специальной евклидовой группой на R н , и обозначается SE( n ) .
Смещения и движение [ править ]

Положение одного компонента механической системы относительно другого определяется введением системы отсчета, скажем , M на одном из компонентов, которая перемещается относительно неподвижной системы F на другом. Жесткая трансформация или смещение M относительно F определяет относительное положение двух компонентов. Смещение состоит из комбинации вращения и перемещения .
Совокупность всех перемещений M относительно F называется конфигурационным пространством M. M Гладкая кривая из одного положения в другое в этом конфигурационном пространстве представляет собой непрерывный набор смещений, называемый движением относительно F. относительно Движение F. M тело состоит из непрерывной совокупности вращений и перемещений.
Матричное представление [ править ]
Сочетание вращения и трансляции в плоскости R 2 может быть представлен матрицей определенного типа 3×3, известной как однородное преобразование. Однородное преобразование 3×3 строится из матрицы вращения A ( φ ) 2×2 и вектора перемещения 2×1 d = ( d x , d y ), как:
![{\displaystyle [T(\phi,\mathbf {d})]={\begin{bmatrix}A(\phi) &\mathbf {d} \\\mathbf {0} &1\end{bmatrix}}={ \begin{bmatrix}\cos \phi &-\sin \phi &d_{x}\\\sin \phi &\cos \phi &d_{y}\\0&0&1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50078656eb1b2395a2ad84383cd16868c54649b1)
В частности, пусть r определяет координаты точек в системе отсчета M, совпадающих с фиксированной системой отсчета F . Затем, когда начало координат M смещается вектором перемещения d относительно начала координат F и поворачивается на угол φ относительно оси x F , новые координаты в F точек в M задаются формулой:
![{\displaystyle \mathbf {P} =[T(\phi,\mathbf {d})]\mathbf {r} = {\begin{bmatrix}\cos \phi &-\sin \phi &d_{x}\ \ sin \phi &\cos \phi &d_{y}\\0&0&1\end{bmatrix}}{\begin{bmatrix}x\\y\\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9654bfae7e5d0f825ec57848bd5ab493f408804f)
Гомогенные преобразования представляют собой аффинные преобразования . Эта формулировка необходима, поскольку не является линейным преобразованием R сдвиг 2 . Однако, используя проективную геометрию, так что R 2 считается подмножеством R 3 , трансляции становятся аффинными линейными преобразованиями. [20]
Чистый перевод [ править ]
Если твердое тело движется так, что его система отсчета M не вращается ( θ = 0) относительно неподвижной системы F , движение называется чистым перемещением. В этом случае траектория каждой точки тела является смещением траектории d ( t ) начала координат M, то есть:
![{\ displaystyle \ mathbf {r} (t) = [T (0, \ mathbf {d} (t))] \ mathbf {p} = \ mathbf {d} (t) + \ mathbf {p} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/32f22d9b4fcc015f80b746db422f93b8d8d145dc)
Таким образом, для тел в чистом перемещении скорость и ускорение каждой точки P тела определяются выражением:

Вращение тела вокруг неподвижной оси [ править ]
Вращательная или угловая кинематика – это описание вращения объекта. [21] В дальнейшем внимание ограничивается простым вращением вокруг оси фиксированной ориентации. Ось Z выбрана для удобства.
Должность [ править ]
Это позволяет описать вращение как угловое положение плоской системы отсчета M относительно фиксированной F вокруг этой общей оси z . Координаты p = ( x , y ) в M связаны с координатами P = (X, Y) в F матричным уравнением:
![{\ displaystyle \ mathbf {P} (t) = [A (t)] \ mathbf {p},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3a4e865fc0f6be2e59e479f4b0a03f8114971382)
где
![{\displaystyle [A(t)]={\begin{bmatrix}\cos(\theta (t))&-\sin(\theta (t))\\\sin(\theta (t))&\cos (\theta (t))\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/53916525d50fa175a581d579e61b62d7d8a4610d)
Скорость [ править ]
Если точка p не движется в M , ее скорость в F определяется выражением
![{\displaystyle \mathbf {v} _{P}={\dot {\mathbf {P} }}=[{\dot {A}}(t)]\mathbf {p} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/701dae17b9e581be69746145fd6133e7f07f2f16)
![{\displaystyle \mathbf {v} _{P}=[{\dot {A}}(t)][A(t)^{-1}]\mathbf {P} =[\Omega ]\mathbf {P } ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8fac9117de99ee6837c171f5f46eede17890bcba)
![{\displaystyle [\Omega ]={\begin{bmatrix}0&-\omega \\\omega &0\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/eed637d1916abe2a271e19c744c416d1cf20e4f0)

Ускорение [ править ]
Ускорение P ( t ) в F получается как производная скорости по времени,
![{\displaystyle \mathbf {A} _{P}={\ddot {P}}(t)=[{\dot {\Omega }}]\mathbf {P} +[\Omega ]{\dot {\mathbf {P} }},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/62a4ca56d89ccc6d2ec6d0daffd6907b9c47ccd5)
![{\displaystyle \mathbf {A} _{P}=[{\dot {\Omega }}]\mathbf {P} +[\Omega ][\Omega ]\mathbf {P},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50d611f89cc9b7358cec772370a6ee8d79a792a9)
![{\displaystyle [{\dot {\Omega }}]={\begin{bmatrix}0&-\alpha \\\alpha &0\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d6ebb7e70e2d2370e781ee86ea55cd0fb7d469d7)

Тогда описание вращения включает в себя эти три величины:
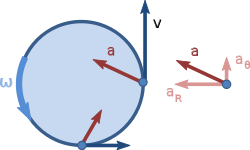
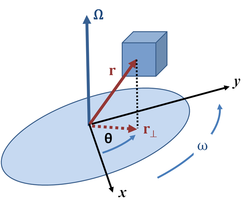
- Угловое положение : ориентированное расстояние от выбранного начала координат на оси вращения до точки объекта представляет собой вектор r ( t ), определяющий точку. Вектор r ( t ) имеет некоторую проекцию (или, что то же самое, некоторую компоненту) r⊥ ) на плоскость , ( t перпендикулярную оси вращения. Тогда угловое положение этой точки — это угол θ от базовой оси (обычно положительной оси x ) к вектору r ⊥ ( t ) в известном направлении вращения (обычно задаваемом правилом правой руки ).
- Угловая скорость : угловая скорость ω — это скорость, с которой угловое положение θ изменяется по отношению ко времени t : Угловая скорость представлена на рисунке 1 вектором Ω, направленным вдоль оси вращения с величиной ω и смыслом, определяемым направлением вращения, как задано правилом правой руки .
- Угловое ускорение : величина углового ускорения α — это скорость, с которой угловая скорость ω изменяется по отношению ко времени t :


Уравнения поступательной кинематики можно легко расширить до плоской кинематики вращения для постоянного углового ускорения с простыми заменами переменных:




Здесь θi — и θf — соответственно начальное и конечное угловые положения, ωi и α ωf . — соответственно начальная и конечная угловые скорости, а постоянное угловое ускорение Хотя положение в пространстве и скорость в пространстве являются истинными векторами (с точки зрения их свойств при вращении), как и угловая скорость, угол сам по себе не является истинным вектором.
точек в теле, движущихся в измерениях трех Траектории
Важные формулы кинематики определяют скорость и ускорение точек движущегося тела, когда они прослеживают траектории в трехмерном пространстве. Это особенно важно для центра масс тела, который используется для вывода уравнений движения с использованием либо второго закона Ньютона , либо уравнений Лагранжа .
Должность [ править ]
Для определения этих формул движение компонента B механической системы определяется набором вращений [A( t )] и трансляций d ( t ), собранных в однородное преобразование [T( t )]=[A ( т ), д ( т )]. Если p — координаты точки P в B, измеренные в движущейся системе отсчета M , то траектория этой точки, прослеживаемая в F, определяется выражением:
![{\displaystyle \mathbf {P} (t)=[T(t)]\mathbf {p} = {\begin{bmatrix}\mathbf {P} \\1\end{bmatrix}} = {\begin{bmatrix }A(t)&\mathbf {d} (t)\\0&1\end{bmatrix}}{\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6e928b50529956cc7ca762cee6969f7321c5cf9d)
Это уравнение траектории P можно инвертировать для вычисления координатного вектора p в M следующим образом:
![{\displaystyle \mathbf {p} =[T(t)]^{-1}\mathbf {P} (t)= {\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}= {\begin{bmatrix}A(t)^{\text{T}}&-A(t)^{\text{T}}\mathbf {d} (t)\\0&1\end{bmatrix}}{ \begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3e1aa622ad90b69b42880d95b90afb0b27407a60)
![{\displaystyle [A(t)]^{\text{T}}[A(t)]=I.\!}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e132dec7e35a3f7b5135d601bb20851ce2abe646)
Скорость [ править ]
Скорость точки P вдоль ее траектории P ( t ) получается как производная по времени этого вектора положения,
![{\displaystyle \mathbf {v}_{P}=[{\dot {T}}(t)]\mathbf {p} = {\begin{bmatrix}\mathbf {v}_{P}\0\ end {bmatrix}}=\left({\frac {d}{dt}}{\begin{bmatrix}A(t)&\mathbf {d} (t)\\0&1\end{bmatrix}}\right) { \begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}={\begin{bmatrix}{\dot {A}}(t)&{\dot {\mathbf {d} }}( t )\\0&0\end{bmatrix}}{\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4d216e15ab36a895fa2fa109fbdf77b9590d5ccb)
Эту формулу можно изменить, чтобы получить скорость P воздействуя на его траекторию P ( t ), измеренную в фиксированной системе отсчета F. , Подстановка обратного преобразования для p в уравнение скорости дает:
![{\displaystyle {\begin{aligned}\mathbf {v}_{P}&=[{\dot {T}}(t)][T(t)]^{-1}\mathbf {P} (t )\\[4pt]&={\begin{bmatrix}\mathbf {v}_{P}\\0\end{bmatrix}}={\begin{bmatrix}{\dot {A}}&{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}{\begin{bmatrix}A&\mathbf {d} \\0&1\end{bmatrix}}^{-1}{\begin{bmatrix}\ mathbf {P}(t)\\1\end{bmatrix}}\\[4pt]&={\begin{bmatrix}{\dot {A}}&{\dot {\mathbf {d} }}\\ 0&0\end{bmatrix}}A^{-1}{\begin{bmatrix}1&-\mathbf {d} \\0&A\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\ \1\end{bmatrix}}\\[4pt]&={\begin{bmatrix}{\dot {A}}A^{-1}&-{\dot {A}}A^{-1}\ mathbf {d} + {\dot {\mathbf {d} }}\\0&0\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}\\ [4pt]&={\begin{bmatrix}{\dot {A}}A^{\text{T}}&-{\dot {A}}A^{\text{T}}\mathbf {d} +{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}\\[6pt]\ mathbf {v}_{P}&=[S]\mathbf {P} .\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6aa70149e117b2b14b1f6d473dd453dc5530c7e6)
![{\displaystyle [S]={\begin{bmatrix}\Omega &-\Omega \mathbf {d} + {\dot {\mathbf {d} }}\\0&0\end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/90d988bfd6ff36b285d6294bf167b63d5f91bdef)
![{\displaystyle [\Omega ]={\dot {A}}A^{\text{T}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/21d0117f60aeca689c59abbfe4b88b1a287a1b63)
Умножая на оператор [ S ], формула для скорости v P принимает вид:
+{\dot {\mathbf {d} }}=\omega \times \mathbf { R} _{P/O}+\mathbf {v} _{O},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/127655f82eb90e56b116afbcf8aa567b908e516b)


Ускорение [ править ]
Ускорение точки P в движущемся теле B находится как производная по времени ее вектора скорости:
![{\displaystyle \mathbf {A} _{P}={\frac {d}{dt}}\mathbf {v} _{P}={\frac {d}{dt}}\left([S]\ mathbf {P} \right)=[{\dot {S}}]\mathbf {P} +[S]{\dot {\mathbf {P} }}=[{\dot {S}}]\mathbf { P} +[S][S]\mathbf {P} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/80998957f2829ada7a5e77e2fb68a31285e843cb)
Это уравнение можно сначала расширить, вычислив
![{\displaystyle [{\dot {S}}]={\begin{bmatrix}{\dot {\Omega }} &-{\dot {\Omega }}\mathbf {d} -\Omega {\dot {\ mathbf {d} }}+{\ddot {\mathbf {d} }}\\0&0\end{bmatrix}}={\begin{bmatrix}{\dot {\Omega }}&-{\dot {\Omega }}\mathbf {d} -\Omega \mathbf {v}_{O}+\mathbf {A}_{O}\\0&0\end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4a39702184d0f72216205c32ebcfa8e0e9c3b478)
![{\displaystyle [S]^{2}={\begin{bmatrix}\Omega &-\Omega \mathbf {d} +\mathbf {v} _{O}\\0&0\end{bmatrix}}^{2 }={\begin{bmatrix}\Omega ^{2}&-\Omega ^{2}\mathbf {d} +\Omega \mathbf {v} _{O}\\0&0\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/557b35e24d57f15d0c9d2998053809be7105a2f9)
Формулу ускорения AP : теперь можно получить как



Кинематические ограничения [ править ]
Кинематические ограничения — это ограничения на движение компонентов механической системы. Можно считать, что кинематические ограничения имеют две основные формы: (i) ограничения, возникающие из шарниров, ползунков и кулачковых соединений, которые определяют конструкцию системы, называемые голономными ограничениями , и (ii) ограничения, налагаемые на скорость системы, такие как ограничение ножевого края коньков на плоской плоскости или катание без проскальзывания диска или сферы, контактирующих с плоскостью, которые называются неголономными ограничениями . Ниже приведены некоторые распространенные примеры.
Кинематическая муфта [ править ]
Кинематическая муфта точно ограничивает все 6 степеней свободы.
Катиться без скольжения [ править ]
Объект, катящийся по поверхности без скольжения, подчиняется условию, что скорость его центра масс равна векторному произведению его угловой скорости на вектор от точки контакта к центру масс:

Для случая объекта, который не наклоняется и не поворачивается, это сводится к .

Нерастяжимый шнур [ править ]
Это тот случай, когда тела соединены идеализированной нитью, которая остается в натянутом состоянии и не может изменить длину. Ограничение состоит в том, что сумма длин всех отрезков шнура равна общей длине, и соответственно производная по времени от этой суммы равна нулю. [22] [23] [24] Динамическая задача такого типа — маятник . Другой пример — барабан, вращающийся под действием силы тяжести под действием падающего груза, прикрепленного к ободу нерастяжимым шнуром. [25] Задача равновесия (т.е. некинематическая ) такого типа — это цепная линия . [26]
Кинематические пары [ править ]
Рело назвал идеальные связи между компонентами, образующими кинематические пары машины . Он различал высшие пары, которые, как говорят, имеют линейный контакт между двумя звеньями, и низшие пары, которые имеют пространственный контакт между звеньями. Дж. Филлипс показывает, что существует множество способов построения пар, не подпадающих под эту простую классификацию. [27]
Нижняя пара [ править ]
Нижняя пара — это идеальный сустав, или голономная связь, которая поддерживает контакт между точкой, линией или плоскостью движущегося твердого (трехмерного) тела с соответствующей точечной линией или плоскостью в неподвижном твердом теле. Бывают следующие случаи:
- Вращающаяся пара, или шарнирное соединение, требует, чтобы линия или ось в движущемся теле оставалась коллинеарной с линией в неподвижном теле, а плоскость, перпендикулярная этой линии в движущемся теле, поддерживала контакт с аналогичной перпендикулярной плоскостью. в фиксированном теле. Это накладывает пять ограничений на относительное перемещение звеньев, которое, следовательно, имеет одну степень свободы, то есть чистое вращение вокруг оси шарнира.
- Призматическое соединение , или ползун, требует, чтобы линия или ось в движущемся теле оставалась коллинеарной с линией в неподвижном теле, а плоскость, параллельная этой линии в движущемся теле, сохраняла контакт с аналогичной параллельной плоскостью в фиксированное тело. Это накладывает пять ограничений на относительное перемещение звеньев, которые, следовательно, имеют одну степень свободы. Эта степень свободы представляет собой расстояние скольжения вдоль линии.
- Цилиндрическое соединение требует, чтобы линия или ось движущегося тела оставалась коллинеарной с линией неподвижного тела. Это комбинация вращающегося и скользящего соединения. Этот сустав имеет две степени свободы. Положение движущегося тела определяется как вращением вокруг оси, так и скольжением вдоль нее.
- Сферический шарнир или шаровой шарнир требует, чтобы точка движущегося тела поддерживала контакт с точкой неподвижного тела. Этот сустав имеет три степени свободы.
- Плоское соединение требует, чтобы плоскость движущегося тела поддерживала контакт с плоскостью неподвижного тела. Этот сустав имеет три степени свободы.
Старшие пары [ править ]
Вообще говоря, высшая пара — это ограничение, которое требует, чтобы кривая или поверхность движущегося тела поддерживала контакт с кривой или поверхностью неподвижного тела. Например, контакт между кулачком и его толкателем представляет собой высшую пару, называемую кулачковым соединением . Аналогичным образом контакт между эвольвентными кривыми, образующими зацепляющиеся зубья двух шестерен, представляет собой кулачковые соединения.
Кинематические цепи [ править ]
Твердые тела («звенья»), соединенные кинематическими парами («сочленениями»), называются кинематическими цепями . Механизмы и роботы являются примерами кинематических цепей. Степень свободы кинематической цепи вычисляется по числу звеньев, количеству и типу соединений по формуле подвижности . Эту формулу можно также использовать для перечисления топологий кинематических цепей, имеющих заданную степень свободы, что в проектировании машин известно как синтез типов .
Примеры [ править ]
с одной степенью свободы, Плоские тяги собранные из N звеньев и j шарниров или скользящих соединений, представляют собой:
- N = 2, j = 1: двухзвенная связь – рычаг;
- N = 4, j = 4: четырехзвенная связь ;
- N = 6, j = 7: шестизвенная навеска . Он должен иметь два звена («тройные звенья»), которые поддерживают три соединения. Существуют две различные топологии, которые зависят от того, как соединены две тройные связи. В топологии Ватта две тройные связи имеют общее соединение; в топологии Стивенсона два тройных звена не имеют общего соединения и соединены бинарными звеньями. [28]
- N = 8, j = 10: восьмизвенная связь с 16 различными топологиями;
- N = 10, j = 13: десятизвенная связь с 230 различными топологиями;
- N = 12, j = 16: двенадцатизвенная связь с 6856 топологиями.
О более крупных цепях и топологиях их связей см. RP Sunkari и LC Schmidt , «Структурный синтез плоских кинематических цепей путем адаптации алгоритма типа Маккея», Mechanism and Machine Theory # 41, стр. 1021–1030 (2006).
См. также [ править ]
- Абсентация
- Ускорение
- Аффинная геометрия § Кинематика
- Аналитическая механика
- Прикладная механика
- Небесная механика
- Центростремительная сила
- Классическая механика
- Расстояние
- Динамика (физика)
- Фиктивная сила
- Передняя кинематика
- Четырехзвенная связь
- Обратная кинематика
- Джерк (физика)
- Законы Кеплера
- Кинематическая муфта
- Кинематическая схема
- Кинематический синтез
- Кинетика (физика)
- Движение (физика)
- Орбитальная механика
- Статика
- Скорость
- Интегральная кинематика
- Критерий Чебычева–Грюблера–Куцбаха
Ссылки [ править ]
- ^ Эдмунд Тейлор Уиттакер (1904). Трактат об аналитической динамике частиц и твердых тел . Издательство Кембриджского университета. Глава 1. ISBN 0-521-35883-3 .
- ^ Джозеф Стайлз Беггс (1983). Кинематика . Тейлор и Фрэнсис. п. 1. ISBN 0-89116-355-7 .
- ^ Томас Уоллес Райт (1896). Элементы механики, включая кинематику, кинетику и статику . Э и ФН Спон. Глава 1.
- ^ Рассел К. Хиббелер (2009). «Кинематика и кинетика частицы» . Инженерная механика: Динамика (12-е изд.). Прентис Холл. п. 298. ИСБН 978-0-13-607791-6 .
- ^ Ахмед А. Шабана (2003). «Справочная кинематика» . Динамика систем многих тел (2-е изд.). Издательство Кембриджского университета. ISBN 978-0-521-54411-5 .
- ^ ПП Теодореску (2007). «Кинематика» . Механические системы, классические модели: механика частиц . Спрингер. п. 287. ИСБН 978-1-4020-5441-9 . .
- ^ А. Бивенер (2003). Передвижение животных . Издательство Оксфордского университета. ISBN 019850022X .
- ^ Дж. М. Маккарти и Г. С. Со, 2010, Геометрический дизайн связей, Спрингер, Нью-Йорк.
- ^ Ампер, Андре-Мари (1834). Очерк философии науки . В бакалавриате.
- ^ Мерц, Джон (1903). История европейской мысли в девятнадцатом веке . Блэквуд, Лондон. стр. 5 .
- ^ О. Боттема и Б. Рот (1990). Теоретическая кинематика . Дуврские публикации. предисловие, с. 5. ISBN 0-486-66346-9 .
- ^ Харпер, Дуглас. «кинотеатр» . Интернет-словарь этимологии .
- ^ Ускоренный курс физики
- ^ 2.4 Интеграция , MIT, заархивировано из оригинала 13 ноября 2021 г. , получено 4 июля 2021 г.
- ^ https://www.youtube.com/watch?v=jLJLXka2wEM Интегралы физики ускоренного курса
- ^ https://www.mathsisfun.com/algebra/trig-area-triangle-without-right-angle.html Площадь треугольников без прямых углов
- ^ kinematics.gif (508×368) (Изображение) . Проверено 3 ноября 2023 г.
- ^ Рело, Ф .; Кеннеди, Алекс Б.В. (1876), Кинематика машин: Очерки теории машин , Лондон: Macmillan
- ^ Геометрия: изучение свойств данных элементов, которые остаются неизменными при определенных преобразованиях. «Определение геометрии» . Онлайн-словарь Мерриам-Вебстера. 31 мая 2023 г.
- ^ Пол, Ричард (1981). Роботы-манипуляторы: математика, программирование и управление: компьютерное управление роботами-манипуляторами . MIT Press, Кембридж, Массачусетс. ISBN 978-0-262-16082-7 .
- ^ Р. Дуглас Грегори (2006). Глава 16 . Кембридж, Англия: Кембриджский университет. ISBN 0-521-82678-0 .
- ^ Уильям Томсон Кельвин и Питер Гатри Тейт (1894). Элементы натуральной философии . Издательство Кембриджского университета. п. 4 . ISBN 1-57392-984-0 .
- ^ Уильям Томсон Кельвин и Питер Гатри Тейт (1894). Элементы натуральной философии . п. 296.
- ^ М. Фогель (1980). «Задача 17-11» . Решение задач по механике . Ассоциация исследований и образования. п. 613. ИСБН 0-87891-519-2 .
- ^ Церковь Ирвинга Портера (1908 г.). Механика машиностроения . Уайли. п. 111 . ISBN 1-110-36527-6 .
- ^ Моррис Клайн (1990). Математическая мысль от древности до современности . Издательство Оксфордского университета. п. 472 . ISBN 0-19-506136-5 .
- ^ Филлипс, Джек (2007). Свобода в машинах, тома 1–2 (переиздание). Издательство Кембриджского университета. ISBN 978-0-521-67331-0 .
- ^ Цай, Лунг-Вэнь (2001). Проектирование механизмов: перечисление кинематических конструкций по функциям (иллюстрировано под ред.). ЦРК Пресс. п. 121. ИСБН 978-0-8493-0901-4 .
Дальнейшее чтение [ править ]
- Кутсер, Теун (1994), «§8.3 Кинематика», в Граттан-Гиннессе, Айвор (ред.), Сопутствующая энциклопедия истории и философии математических наук , том. 2, Рутледж , стр. 994–1001, ISBN. 0-415-09239-6
- Мун, Фрэнсис К. (2007). Машины Леонардо да Винчи и Франца Рело, Кинематика машин от Возрождения до XX века . Спрингер. ISBN 978-1-4020-5598-0 .
- Эдуард Этюд (1913) переводчик Д. Х. Дельфениха, "Основы и задачи аналитической кинематики" .
Внешние ссылки [ править ]
- Java-апплет 1D-кинематики
- Physclips: Механика с анимацией и видеоклипами от Университета Нового Южного Уэльса.
- Цифровая библиотека кинематических моделей для проектирования (KMODDL) , в которой представлены фильмы и фотографии сотен рабочих моделей механических систем Корнелльского университета , а также библиотека электронных книг с классическими текстами по механическому проектированию и машиностроению.
- Микродюймовое позиционирование с помощью кинематических компонентов