Уравнения движения
| Часть серии о |
| Классическая механика |
|---|




В физике уравнения движения — это уравнения , которые описывают поведение физической системы с точки зрения ее движения как функции времени. [1] Более конкретно, уравнения движения описывают поведение физической системы как набор математических функций в терминах динамических переменных. Эти переменные обычно представляют собой пространственные координаты и время, но могут включать компоненты импульса . Наиболее общим выбором являются обобщенные координаты , которыми могут быть любые удобные переменные, характерные для физической системы. [2] Функции определяются в евклидовом пространстве в классической механике , но заменяются искривленными пространствами в теории относительности . Если динамика системы известна, уравнения являются решениями дифференциальных уравнений, описывающих движение динамики.
Типы [ править ]
Существует два основных описания движения: динамика и кинематика . импульсы, силы и энергия частиц Динамика носит общий характер, поскольку учитываются . В этом случае иногда термин «динамика» относится к дифференциальным уравнениям, которым удовлетворяет система (например, второй закон Ньютона или уравнения Эйлера-Лагранжа ), а иногда и к решениям этих уравнений.
Однако кинематика проще. Это касается только переменных, полученных из положения объектов и времени. В условиях постоянного ускорения эти более простые уравнения движения обычно называются уравнениями SUVAT , возникающими из определений кинематических величин : перемещения ( s ), начальной скорости ( u ), конечной скорости ( v ), ускорения ( a ), и время ( т ).
Дифференциальное уравнение движения, обычно идентифицируемое как некоторый физический закон (например, F = ma) и применяющее определения физических величин , используется для составления уравнения задачи. [ нужны разъяснения ] Решение дифференциального уравнения приведет к общему решению с произвольными константами, причем произвольность соответствует семейству решений. Частное решение можно получить, задав начальные значения , что фиксирует значения констант.
это формально, в общем случае уравнение движения M является функцией положения r Чтобы сформулировать объекта, его скорости (первая производная по времени от r , v = d r / dt ) и его ускорение (вторая производная от r , a = д 2 р / дт 2 ) и время t . Евклидовы векторы в 3D выделены жирным шрифтом. Это эквивалентно тому, что уравнение движения в r (ОДУ) второго порядка является обыкновенным дифференциальным уравнением в r ,
![{\displaystyle M\left[\mathbf {r} (т),\mathbf {\dot {r}} (t),\mathbf {\ddot {r}} (t),t\right]=0\, ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/969c32e88d55826a347715bee49544f4ab6bf67a)
где t — время, а каждая точка обозначает одну производную по времени . Начальные условия задаются постоянными значениями при t = 0 ,

Решение r ( t ) уравнения движения с заданными начальными значениями описывает систему для всех моментов времени t после t = 0 . Другие динамические переменные, такие как импульс p объекта или величины, полученные из r и p , такие как угловой момент , могут использоваться вместо r в качестве величины, которую нужно найти из некоторого уравнения движения, хотя положение объекта в момент времени t на сегодняшний день является наиболее востребованным количеством.
Иногда уравнение будет линейным и с большей вероятностью будет точно решаемым. В общем случае уравнение будет нелинейным и не может быть решено точно, поэтому необходимо использовать различные приближения. Решения нелинейных уравнений могут демонстрировать хаотическое поведение в зависимости от того, насколько чувствительна система к начальным условиям.
История [ править ]
Кинематика, динамика и математические модели Вселенной развивались постепенно на протяжении трех тысячелетий благодаря множеству мыслителей, имена лишь некоторых из которых нам известны. В древности жрецы , астрологи и астрономы предсказывали солнечные и лунные затмения , солнцестояния и равноденствия Солнца , а также период Луны . Но у них не было ничего, кроме набора алгоритмов, которыми они могли бы управлять. Уравнения движения не были записаны еще тысячу лет.
Средневековые учёные XIII века — например, в относительно новых университетах Оксфорда и Парижа — привлекали древних математиков (Евклида и Архимеда) и философов (Аристотеля) для разработки новой совокупности знаний, ныне называемой физикой.
В Оксфорде Мертон-колледж приютил группу ученых, занимавшихся естественными науками, в основном физикой, астрономией и математикой, которые были такого же уровня, как интеллектуалы Парижского университета. Томас Брэдуордин расширил аристотелевские величины, такие как расстояние и скорость, и приписал им интенсивность и протяженность. Брэдуордин предложил экспоненциальный закон, включающий силу, сопротивление, расстояние, скорость и время. Николас Орем еще больше расширил аргументы Брэдуордина. Школа Мертона доказала, что количество движения тела, совершающего равноускоренное движение, равно количеству равномерного движения со скоростью, достигнутой на половине пути ускоренного движения.
Для авторов, занимавшихся кинематикой до Галилея , поскольку малые интервалы времени не могли быть измерены, связь между временем и движением была неясной. Они использовали время как функцию расстояния, а при свободном падении — большую скорость в результате большей высоты. Только Доминго де Сото , испанский богослов, в своем комментарии к Аристотеля « Физике» , опубликованном в 1545 году, определив «равномерное диформное» движение (то есть равномерно ускоренное движение) – слово «скорость» не использовалось – как пропорциональное времени, заявило правильно что этот вид движения можно отождествить со свободно падающими телами и снарядами, хотя он не доказал эти положения и не предложил формулу, связывающую время, скорость и расстояние. Комментарии Де Сото удивительно верны в отношении определений ускорения (ускорение — это скорость изменения движения (скорости) во времени) и наблюдения о том, что ускорение будет отрицательным во время подъема.
Подобные дискурсы распространились по всей Европе, сформировав работы Галилео Галилея и других, а также помогли заложить основы кинематики. [3] Галилей вывел уравнение s = 1/2 GT 2 в своей работе геометрически, [4] с помощью правила Мертона , известного теперь как частный случай одного из уравнений кинематики.
Галилей был первым, кто показал, что траектория снаряда представляет собой параболу . Галилей имел представление о центробежной силе и дал правильное определение импульса . Этот акцент на импульсе как фундаментальной величине в динамике имеет первостепенное значение. Он измерял импульс произведением скорости и веса; масса — более поздняя концепция, разработанная Гюйгенсом и Ньютоном. Раскачивая простой маятник, говорит Галилей в «Рассуждениях» [5] что «каждый импульс, приобретенный при спуске по дуге, равен тому, который заставляет то же самое движущееся тело подниматься по той же дуге». Его анализ снарядов показывает, что Галилей усвоил первый закон и второй закон движения. Он не обобщал и не делал их применимыми к телам, не подверженным земному тяготению. Этот шаг был вкладом Ньютона.
Термин «инерция» использовал Кеплер, применив его к телам в состоянии покоя. (Первый закон движения теперь часто называют законом инерции.)
Галилей не до конца уяснил третий закон движения — закон равенства действия и противодействия, хотя и исправил некоторые ошибки Аристотеля. Вместе со Стевином и другими Галилей также писал о статике. Он сформулировал принцип параллелограмма сил, но не осознал до конца его масштаб.
Галилей также интересовался законами маятника, первые наблюдения которых он сделал еще в молодости. В 1583 году, когда он молился в соборе Пизы, его внимание было привлечено движением зажженной и покачивающейся огромной лампы, ориентируясь на его собственный пульс для измерения времени. Ему период казался тем же самым, даже после того, как движение значительно уменьшилось, обнаружив изохронизм маятника.
Более тщательные эксперименты, проведенные им позже и описанные в его «Рассуждениях», показали, что период колебаний зависит от квадратного корня из длины, но не зависит от массы маятника.
Таким образом, мы приходим к Рене Декарту , Исааку Ньютону , Готфриду Лейбницу и др.; и развитые формы уравнений движения, которые начинают признаваться современными.
Позже уравнения движения появились и в электродинамике , при описании движения заряженных частиц в электрическом и магнитном полях сила Лоренца является общим уравнением, которое служит определением того, что понимают под электрическим полем и магнитным полем . С появлением специальной теории относительности и общей теории относительности теоретические модификации пространства-времени означали, что классические уравнения движения также были модифицированы для учета конечной скорости света и кривизны пространства-времени . Во всех этих случаях дифференциальные уравнения выражались в виде функции, описывающей траекторию частицы в пространственных и временных координатах под влиянием сил или преобразований энергии. [6]
Однако уравнения квантовой механики также можно считать «уравнениями движения», поскольку они представляют собой дифференциальные уравнения волновой функции , которая описывает, как квантовое состояние ведет себя аналогичным образом, используя пространственные и временные координаты частиц. Аналоги уравнений движения существуют и в других областях физики для совокупностей физических явлений, которые можно рассматривать как волны, жидкости или поля.
Кинематические уравнения для одной частицы [ править ]
Кинематические величины [ править ]

Из мгновенного положения r = r ( t ) , мгновенного значения в момент времени t , мгновенная скорость v = v ( t ) и ускорение a = a ( t ) имеют общие, не зависящие от координат определения; [7]

Обратите внимание, что скорость всегда указывает в направлении движения, другими словами, для криволинейного пути это касательный вектор . Грубо говоря, производные первого порядка связаны с касательными кривых. По-прежнему для кривых путей ускорение направлено к центру кривизны пути. Опять же, грубо говоря, производные второго порядка связаны с кривизной.
Аналогами вращения являются «угловой вектор» (угол, на который частица вращается вокруг некоторой оси) θ = θ ( t ) , угловая скорость ω = ω ( t ) и угловое ускорение α = α ( t ) :

где n̂ — единичный вектор в направлении оси вращения, а θ — угол, на который объект поворачивается вокруг оси.
Для точечной частицы, вращающейся вокруг некоторой оси с угловой скоростью ω , справедливо следующее соотношение : [8]

где r - вектор положения частицы (радиальный от оси вращения), а v - тангенциальная скорость частицы. Для вращающегося сплошного твердого тела эти соотношения справедливы для каждой точки твердого тела.
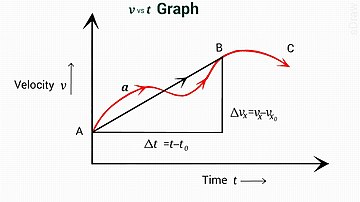
ускорение Равномерное
Дифференциальное уравнение движения частицы с постоянным или равноускоренным ускорением по прямой просто: ускорение постоянно, поэтому вторая производная от положения объекта постоянна. Результаты этого дела суммированы ниже.
Постоянное поступательное ускорение по прямой [ править ]
Эти уравнения применимы к частице, движущейся линейно, в трех измерениях по прямой линии с постоянным ускорением . [9] Поскольку положение, скорость и ускорение коллинеарны (параллельны и лежат на одной линии) — необходимы только величины этих векторов, а поскольку движение происходит по прямой линии, проблема эффективно сводится от трех измерений к одному.
![{\displaystyle {\begin{aligned}v&=at+v_{0}&[1]\\r&=r_{0}+v_{0}t+{\tfrac {1}{2}}{a}t^ {2}&[2]\\r&=r_{0}+{\tfrac {1}{2}}\left(v+v_{0}\right)t&[3]\\v^{2}& =v_{0}^{2}+2a\left(r-r_{0}\right)&[4]\\r&=r_{0}+vt-{\tfrac {1}{2}}{a }t^{2}&[5]\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/346e3b192498f7c6c4deca12702f8f427948fd30)
где:
- r 0 частицы — начальное положение
- r - конечное положение частицы
- v 0 частицы — начальная скорость
- v - конечная скорость частицы
- а частицы - ускорение
- t - интервал времени
![{\displaystyle {\begin{aligned}\mathbf {v} &=\int \mathbf {a} dt=\mathbf {a} t+\mathbf {v} _{0}\,,&[1]\\\mathbf {r} &=\int (\mathbf {a} t+\mathbf {v} _{0})dt={\frac {\mathbf {a} t^{2}}{2}}+\mathbf {v} _{0}t+\mathbf {r} _{0}\,,&[2]\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4621491fedc591b23d07a1f7896fcf12c5b4bdba)
![{\displaystyle {\begin{aligned}v&=at+v_{0}\,,&[1]\\r&={\frac {{a}t^{2}}{2}}+v_{0}t+r_{0}\,.&[2]\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/01077b6a5bf0449acaff5e05f0102fdd1f84e9b4)



![{\displaystyle r=r_{0}+\left({\frac {v+v_{0}}{2}}\right)t\quad [3]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3c8d0cd441e58cf8f118d4e89eaf8462a45fb02a)

![{\displaystyle {\begin{aligned}v&=a\left(r-r_{0}\right)\left({\frac {2}{v+v_{0}}}\right)+v_{0}\\v\left(v+v_{0}\right)&=2a\left(r-r_{0}\right)+v_{0}\left(v+v_{0}\right)\\v^{2}+vv_{0}&=2a\left(r-r_{0}\right)+v_{0}v+v_{0}^{2}\\v^{2}&=v_{0}^{2}+2a\left(r-r_{0}\right)&[4]\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a7823eb6a835c32f8c6e780b7918ef7255c17b6d)

![{\displaystyle {\begin{aligned}r&={\frac {{a}t^{2}}{2}}+2r-2r_{0}-vt+r_{0}\\0&={\frac {{a}t^{2}}{2}}+r-r_{0}-vt\\r&=r_{0}+vt-{\frac {{a}t^{2}}{2}}&[5]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/be5b09f6ca22b9d8cb5ca6ecd1cdd10d19ecb4f2)
Здесь a — постоянное ускорение, или в случае тел, движущихся под действием силы тяжести , стандартная сила тяжести g используется . Обратите внимание, что каждое из уравнений содержит четыре из пяти переменных, поэтому в этой ситуации достаточно знать три из пяти переменных, чтобы вычислить оставшиеся две.
В элементарной физике одни и те же формулы часто записываются в разных обозначениях:
![{\displaystyle {\begin{aligned}v&=u+at&[1]\\s&=ut+{\tfrac {1}{2}}at^{2}&[2]\\s&={\tfrac {1 }{2}}(u+v)t&[3]\\v^{2}&=u^{2}+2as&[4]\\s&=vt-{\tfrac {1}{2}}at ^{2}&[5]\\\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1246ab112ef8137bfed9cffd49530fa032bb9f09)
где u заменил v 0 , s заменяет r - r 0 . Их часто называют уравнениями SUVAT , где «SUVAT» — это аббревиатура переменных: s = смещение, u = начальная скорость, v = конечная скорость, a = ускорение, t = время. [10] [11]
Постоянное линейное ускорение в любом направлении [ править ]

Векторы начального положения, начальной скорости и ускорения не обязательно должны быть коллинеарны, и уравнения движения принимают почти идентичную форму. Единственное отличие состоит в том, что квадраты величин скоростей требуют скалярного произведения . Выводы по существу такие же, как и в коллинеарном случае:
![{\displaystyle {\begin{aligned}\mathbf {v} &=\mathbf {a} t+\mathbf {v} _{0}&[1]\\\mathbf {r} &=\mathbf {r} _ {0}+\mathbf {v} _{0}t+{\tfrac {1}{2}}\mathbf {a} t^{2}&[2]\\\mathbf {r} &=\mathbf { r} _{0}+{\tfrac {1}{2}}\left(\mathbf {v} +\mathbf {v} _{0}\right)t&[3]\\\mathbf {v} ^ {2}&=\mathbf {v} _{0}^{2}+2\mathbf {a} \cdot \left(\mathbf {r} -\mathbf {r} _{0}\right)&[ 4]\\\mathbf {r} &=\mathbf {r} _{0}+\mathbf {v} t-{\tfrac {1}{2}}\mathbf {a} t^{2}&[ 5]\\\конец{выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c757b958c1607b01cc40d06258309a93783ace8f)



Приложения [ править ]
Элементарные и частые примеры кинематики включают в себя снаряды , например мяч, подброшенный вверх в воздух. Зная начальную скорость u , можно вычислить, насколько высоко пролетит мяч, прежде чем начнет падать. Ускорение представляет собой локальное ускорение силы тяжести g . Хотя эти величины кажутся скалярами , важно направление смещения, скорость и ускорение. Фактически их можно рассматривать как однонаправленные векторы. Выбирая s для измерения вверх от земли, ускорение a на самом деле должно быть −g , поскольку сила тяжести действует вниз и, следовательно, также вызванное ею ускорение мяча.
В самой высокой точке шар будет находиться в состоянии покоя: следовательно, v = 0 . Используя уравнение [4] из приведенного выше набора, мы имеем:

Замена и отмена знаков минус дает:

ускорение Постоянное круговое
Аналоги приведенных выше уравнений можно записать и для вращения . Опять же, все эти осевые векторы должны быть параллельны оси вращения, поэтому необходимы только величины векторов,

где α — постоянное угловое ускорение , ω — угловая скорость , ω 0 — начальная угловая скорость, θ — угол поворота ( угловое смещение ), θ 0 — начальный угол, а t — время, необходимое для поворота от исходное состояние в конечное состояние.
Общее плоское движение [ править ]



Это кинематические уравнения для частицы, пересекающей путь в плоскости, описываемый положением r = r ( t ) . [12] Это просто производные по времени вектора положения в плоских полярных координатах с использованием приведенных выше определений физических величин для угловой скорости ω и углового ускорения α . Это мгновенные величины, которые изменяются со временем.
Положение частицы

где ê r и ê θ — полярные единичные векторы. Дифференцирование по времени дает скорость

с радиальной составляющей dr / dt и дополнительная составляющая rω, обусловленная вращением. Дифференцирование по времени снова дает ускорение

которое нарушает радиальное ускорение д 2 р / дт 2 , центростремительное ускорение – rω 2 , ускорение Кориолиса 2 ω dr / dt и угловое ускорение rα .
Особые случаи движения, описываемые этими уравнениями, качественно суммированы в таблице ниже. Два из них уже обсуждались выше в тех случаях, когда либо радиальные компоненты, либо угловые компоненты равны нулю, а ненулевая компонента движения описывает равномерное ускорение.
| Состояние движения | Константа r | r линейный по t | r квадратичный по t | r нелинейно по t |
|---|---|---|---|---|
| Постоянное θ | Стационарный | Равномерный перевод (постоянная скорость перемещения) | Равномерное поступательное ускорение | Неоднородный перевод |
| θ линейный по t | Равномерное угловое движение по окружности (постоянная угловая скорость) | Равномерное угловое движение по спирали, постоянная радиальная скорость. | Угловое движение по спирали, постоянное радиальное ускорение | Угловое движение по спирали с переменным радиальным ускорением. |
| θ квадратично по t | Равномерное угловое ускорение по окружности | Равномерное угловое ускорение по спирали, постоянная радиальная скорость. | Равномерное угловое ускорение по спирали, постоянное радиальное ускорение | Равномерное угловое ускорение по спирали, переменное радиальное ускорение |
| θ нелинейно по t | Неравномерное угловое ускорение по окружности | Неравномерное угловое ускорение по спирали, постоянная радиальная скорость | Неравномерное угловое ускорение по спирали, постоянное радиальное ускорение | Неравномерное угловое ускорение по спирали, переменное радиальное ускорение |
General 3D motions [ edit ]
В трехмерном пространстве уравнения в сферических координатах ( r , θ , φ ) с соответствующими единичными векторами ê r , ê θ и ê φ , положением, скоростью и ускорением обобщаются соответственно на

В случае постоянного φ это сводится к приведенным выше плоским уравнениям.
движения Динамические уравнения
Механика Ньютона [ править ]
Первым разработанным общим уравнением движения был Ньютона второй закон движения . В наиболее общей форме он гласит, что скорость изменения импульса p = p ( t ) = m v ( t ) объекта равна силе F = F ( x ( t ), v ( t ), t ), действующей на него. , [13] : 1112

Сила в уравнении — это не сила, которую оказывает объект. Заменяя импульс массой, умноженной на скорость, закон также записывается более известным образом как

поскольку m является постоянной в механике Ньютона .
Второй закон Ньютона применим к точечным частицам и ко всем точкам твердого тела . Они также применимы к каждой точке массового континуума, как деформируемые твердые тела или жидкости, но необходимо учитывать движение системы; см. материальный производный . В случае, если масса непостоянна, недостаточно использовать правило произведения для производной по времени от массы и скорости, а второй закон Ньютона требует некоторой модификации, согласующейся с сохранением импульса ; см. систему переменной массы .
Записать уравнения движения в векторной форме, используя законы движения Ньютона, может быть просто, но компоненты могут меняться сложным образом в зависимости от пространственных координат и времени, и решить их непросто. Часто существует избыток переменных, которые необходимо полностью решить, поэтому законы Ньютона не всегда являются наиболее эффективным способом определения движения системы. В простых случаях прямоугольной геометрии законы Ньютона прекрасно работают в декартовых координатах, но в других системах координат они могут стать чрезвычайно сложными.
Форма импульса предпочтительнее, поскольку ее легко обобщить на более сложные системы, такие как специальная и общая теория относительности (см. Четырехимпульс ). [13] : 112 Его также можно использовать с сохранением импульса. Однако законы Ньютона не более фундаментальны, чем сохранение импульса, поскольку законы Ньютона просто согласуются с тем фактом, что нулевая результирующая сила, действующая на объект, подразумевает постоянный импульс, в то время как результирующая сила подразумевает, что импульс не является постоянным. Сохранение импульса всегда справедливо для изолированной системы, на которую не действуют равнодействующие силы.
Для ряда частиц (см. задачу многих тел ) уравнение движения одной частицы i под влиянием других частиц имеет вид [7] [1]

где p i — импульс частицы i , F ij — сила, действующая на частицу i со стороны частицы j , а F E — результирующая внешняя сила, действующая на любой агент, не являющийся частью системы. Частица i не оказывает на себя силы.
Законы движения Эйлера подобны законам Ньютона, но применяются конкретно к движению твердых тел . Уравнения Ньютона -Эйлера объединяют силы и моменты, действующие на твердое тело, в одно уравнение.
Второй закон вращения Ньютона имеет форму, аналогичную случаю поступательного движения: [13]

приравнивая крутящий момент , действующий на тело, скорости изменения его момента количества движения L . Аналогично массе, умноженной на ускорение, момента инерции тензор I зависит от распределения массы вокруг оси вращения, а угловое ускорение - это скорость изменения угловой скорости,

Опять же, эти уравнения применимы к точкам, таким как частицы, или к каждой точке твердого тела.
Аналогично, для нескольких частиц уравнение движения одной частицы i имеет вид [7]

где L i — угловой момент частицы i , τ ij — крутящий момент на частице i со стороны частицы j , а τ E — результирующий внешний крутящий момент (из-за любого агента, не являющегося частью системы). Частица i не оказывает на себя крутящего момента.
Приложения [ править ]
Некоторые примеры [14] Закон Ньютона включает в себя описание движения простого маятника ,

и затухающий гармонический генератор с синусоидальным управлением ,

Для описания движения масс под действием силы тяжести закон гравитации Ньютона можно объединить со вторым законом Ньютона. Для двух примеров: шар массы m, брошенный в воздух, в воздушных потоках (таких как ветер), описываемых векторным полем сил сопротивления R = R ( r , t ) ,

где G — гравитационная постоянная , M — масса Земли, а A = R / m — ускорение снаряда, вызванное воздушными потоками в положении r и времени t .
Классическая N задача тел для N частиц, каждая из которых взаимодействует друг с другом под действием гравитации, представляет собой набор N нелинейных связанных ОДУ второго порядка:

где i = 1, 2, ..., N обозначает величины (массу, положение и т. д.), связанные с каждой частицей.
Аналитическая механика [ править ]

Использование всех трех координат трехмерного пространства не является необходимым, если в системе имеются ограничения. система имеет N степеней свободы , то можно использовать набор N обобщенных координат q ( t ) = [ q1 Если ( t ), q2 t ( t ... qN ) ( ) ] для определения конфигурации системы. Они могут иметь форму дуг или углов . Они значительно упрощают описание движения, поскольку используют внутренние ограничения, ограничивающие движение системы, а количество координат сводится к минимуму. обобщенных Производные по времени координат – это обобщенные скорости

Уравнения Эйлера – Лагранжа имеют вид [2] [16]

где лагранжиан является функцией конфигурации q и скорости ее изменения во времени. d q / dt (и, возможно, время t )
![{\displaystyle L=L\left[\mathbf {q} (т),\mathbf {\dot {q}} (t),t\right]\,.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9a30f80cbaa05dc7438902e9efb67fbad8ea096c)
Задавая лагранжиан системы, затем подставляя в уравнения, оценивая частные производные и упрощая, набор связанных N второго порядка ОДУ получается в координатах.
Уравнения Гамильтона : [2] [16]

где гамильтониан
![{\ displaystyle H = H \ left [\ mathbf {q} (t), \ mathbf {p} (t), t \ right] \,,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/aecc975922b815e9bb266e1e3158865400b860c7)
является функцией конфигурации q и сопряженных «обобщенных» импульсов

в котором ∂ / ∂ q = ( ∂ / ∂ q 1 , ∂ / ∂ q 2 , …, ∂ / ∂ q N ) — сокращенное обозначение вектора частных производных по указанным переменным (см., например, матричное исчисление для этого обозначения знаменателя), и, возможно, времени t ,
Устанавливая гамильтониан системы, затем подставляя в уравнения, оценивая частные производные и упрощая, набор связанных 2 N ОДУ первого порядка в координатах q i и импульсах p i получаем .
Уравнение Гамильтона – Якоби имеет вид [2]

где
![{\displaystyle S[\mathbf {q},t]=\int _{t_{1}}^{t_{2}}L(\mathbf {q},\mathbf {\dot {q}},t) \,дт\,,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0dde602b4562727a396922b4b680ebe4afdc9828)
— главная функция Гамильтона , также называемая классическим действием — функционал от L. , В этом случае импульсы определяются выражением

Хотя уравнение имеет простую общую форму, для данного гамильтониана на самом деле это единственное нелинейное УЧП первого порядка с N + 1 переменными. Действие S позволяет идентифицировать сохраняющиеся величины для механических систем, даже когда сама механическая задача не может быть решена полностью, поскольку любая физической системы имеет дифференцируемая симметрия действия соответствующий закон сохранения — теорему Эмми Нётер .
Все классические уравнения движения могут быть выведены из вариационного принципа, известного как принцип наименьшего действия Гамильтона.

утверждение, что путь, который система проходит через конфигурационное пространство, - это путь с наименьшим действием S .
Электродинамика [ править ]
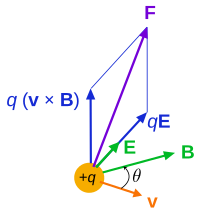
В электродинамике сила, действующая на заряженную частицу с зарядом q, представляет собой силу Лоренца : [17]

В сочетании со вторым законом Ньютона получается дифференциальное уравнение движения первого порядка с точки зрения положения частицы:

или его импульс:

То же уравнение можно получить, используя лагранжиан (и применяя приведенные выше уравнения Лагранжа) для заряженной частицы массы m и заряда q : [16]

где A и φ — электромагнитное скалярное и векторное потенциальное поля. Лагранжиан указывает на дополнительную деталь: канонический импульс в лагранжевой механике определяется формулой:

Альтернативно гамильтониан (и подстановка в уравнения): [16]

Общая теория относительности [ править ]
Геодезическое уравнение движения [ править ]
Приведенные выше уравнения справедливы в плоском пространстве-времени. В искривленном пространстве-времени все становится математически сложнее, поскольку нет прямой линии; это обобщается и заменяется геодезической искривленного пространства-времени (кратчайшая длина кривой между двумя точками). Для искривленных многообразий с метрическим тензором g метрика обеспечивает понятие длины дуги ( см. В линейном элементе подробнее ). Дифференциальная длина дуги определяется как: [19] : 1199

а уравнение геодезических представляет собой дифференциальное уравнение второго порядка по координатам. Общее решение представляет собой семейство геодезических: [19] : 1200

где Γ м αβ — символ Кристоффеля второго рода , содержащий метрику (относительно системы координат).
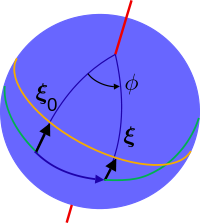
Учитывая распределение массы-энергии , обеспечиваемое тензором энергии-импульса T аб , уравнения поля Эйнштейна представляют собой набор нелинейных уравнений в частных производных второго порядка в метрике и подразумевают, что кривизна пространства-времени эквивалентна гравитационному полю (см. принцип эквивалентности ). Падение массы в искривленном пространстве-времени эквивалентно падению массы в гравитационном поле, поскольку гравитация — это фиктивная сила . Относительное ускорение одной геодезической относительно другой в искривленном пространстве-времени определяется уравнением геодезического отклонения :

где ξ а = х2 а − х 1 а - вектор разделения между двумя геодезическими, Д / дс ( не просто d / ds ) — ковариантная производная , а R а βγδ — тензор кривизны Римана , содержащий символы Кристоффеля. Другими словами, уравнение геодезического отклонения — это уравнение движения масс в искривленном пространстве-времени, аналогичное уравнению силы Лоренца для зарядов в электромагнитном поле. [18] : 34–35
Для плоского пространства-времени метрика представляет собой постоянный тензор, поэтому символы Кристоффеля исчезают, а уравнение геодезических имеет решения в виде прямых линий. Это также предельный случай, когда массы движутся согласно закону тяготения Ньютона .
Вращающиеся объекты [ править ]
В общей теории относительности вращательное движение описывается релятивистским тензором углового момента , включая тензор спина , которые входят в уравнения движения при ковариантных производных по собственному времени . Уравнения Матиссона -Папапетру-Диксона описывают движение вращающихся объектов, движущихся в гравитационном поле .
Аналоги волн и полей [ править ]
В отличие от уравнений движения для описания механики частиц, которые представляют собой системы связанных обыкновенных дифференциальных уравнений, аналогичные уравнения, управляющие динамикой волн и полей, всегда являются уравнениями в частных производных , поскольку волны или поля являются функциями пространства и времени. Для конкретного решения граничные необходимо указать и начальные условия.
Иногда в следующих контекстах уравнения волны или поля также называют «уравнениями движения».
Уравнения поля [ править ]
Уравнения, описывающие пространственную зависимость и эволюцию полей во времени, называются уравнениями поля . К ним относятся
- Уравнения Максвелла для электромагнитного поля ,
- Уравнение Пуассона для ньютоновских потенциалов гравитационного или электростатического поля,
- уравнение поля Эйнштейна для гравитации ( закон тяготения Ньютона является частным случаем слабых гравитационных полей и малых скоростей частиц).
Эта терминология не является универсальной: например, хотя уравнения Навье – Стокса управляют полем скорости жидкости . , их обычно не называют «уравнениями поля», поскольку в этом контексте они представляют импульс жидкости и называются «уравнениями количества движения» " вместо.
Волновые уравнения [ править ]
Уравнения волнового движения называются волновыми уравнениями . Решения волнового уравнения дают временную и пространственную зависимость амплитуды . Граничные условия определяют, описывают ли решения бегущие волны или стоячие волны .
Из классических уравнений движения и уравнений поля; механические, гравитационно-волновые и электромагнитно-волновые Могут быть выведены уравнения. Общее линейное волновое уравнение в 3D:

где X = X ( r , t ) — любая амплитуда механического или электромагнитного поля, скажем: [20]
- поперечное продольное или , смещение вибрирующего стержня, проволоки, кабеля, мембраны и т. д.
- колебательное давление среды, звуковое давление ,
- электрические поля E или D или магнитные поля B или H ,
- напряжение , V или ток I в переменного тока цепи
— v фазовая скорость . Нелинейные уравнения моделируют зависимость фазовой скорости от амплитуды, заменяя v на v ( X ) . Существуют и другие линейные и нелинейные волновые уравнения для очень конкретных приложений, см., например, уравнение Кортевега – де Фриза .
Квантовая теория [ править ]
В квантовой теории появляются концепции волны и поля.
В квантовой механике аналогом классических уравнений движения (закон Ньютона, уравнение Эйлера–Лагранжа, уравнение Гамильтона–Якоби и др.) является уравнение Шрёдингера в наиболее общем виде:

где Ψ — волновая функция системы, Ĥ — квантовый оператор Гамильтона , а не функция, как в классической механике, и ħ — постоянная Планка, деленная на 2 π . Установка гамильтониана и вставка его в уравнение приводит к волновому уравнению, решением которого является волновая функция как функция пространства и времени. Само уравнение Шредингера сводится к уравнению Гамильтона – Якоби, если учитывать принцип соответствия в пределе, когда ħ обращается в ноль. Для сравнения с измерениями к операторам наблюдаемых необходимо применять квантовую волновую функцию в соответствии с проведенным экспериментом, что приводит к , подобным волновым или корпускулярным результатам .
Во всех аспектах квантовой теории, релятивистской или нерелятивистской, существуют различные альтернативные уравнению Шредингера формулировки, которые управляют эволюцией во времени и поведением квантовой системы, например:
- уравнение движения Гейзенберга напоминает временную эволюцию классических наблюдаемых как функции положения, импульса и времени, если заменить динамические наблюдаемые их операторами а классическую скобку Пуассона коммутатором квантовыми ,
- формулировка фазового пространства точно соответствует классической гамильтоновой механике, ставя положение и импульс на равных основаниях,
- Фейнмана Формулировка интеграла по траекториям расширяет принцип наименьшего действия на квантовую механику и теорию поля, делая акцент на использовании лагранжианов, а не гамильтонианов.
См. также [ править ]
- Скаляр (физика)
- Вектор
- Расстояние
- Смещение
- Скорость
- Скорость
- Ускорение
- Угловое смещение
- Угловая скорость
- Угловая скорость
- Угловое ускорение
- Уравнения падающего тела
- Параболическая траектория
- Криволинейные координаты
- Ортогональные координаты
- Законы движения Ньютона
- Движение снаряда
- Уравнение Торричелли
- Уравнение Эйлера–Лагранжа
- Обобщенные силы
- Законы движения Ньютона–Эйлера твердого тела.
Ссылки [ править ]
- ^ Jump up to: а б Р. Г. Лернер ; Джордж Л. Тригг (1991). Энциклопедия физики (второе изд.). Нью-Йорк: Издательство VCH. ISBN 0-89573-752-3 . ОСЛК 20853637 .
- ^ Jump up to: а б с д Хэнд, Луи Н.; Джанет Д. Финч (1998). Аналитическая механика . Кембридж: Издательство Кембриджского университета. ISBN 978-0-521-57572-0 . ОСЛК 37903527 .
- ^ Британский путеводитель по истории математики, изд. Эрик Грегерсен
- ^ Беседы, Галилей
- ^ Диалоги о двух новых науках Галилео Галилея; перевод Генри Крю, Альфонсо Де Сальвио
- ^ Холлидей, Дэвид; Резник, Роберт; Уокер, Джерл (16 июня 2004 г.). Основы физики (7 подред.). Уайли. ISBN 0-471-23231-9 .
- ^ Jump up to: а б с Форшоу, младший; А. Гэвин Смит (2009). Динамика и относительность . Чичестер, Великобритания: John Wiley & Sons. ISBN 978-0-470-01460-8 . OCLC 291193458 .
- ^ г-н Шпигель; С. Липшуц; Д. Спеллман (2009). Векторный анализ . Очерки Шаума (2-е изд.). МакГроу Хилл. п. 33. ISBN 978-0-07-161545-7 .
- ^ Jump up to: а б Уилан, премьер-министр; Ходжсон, MJ (1978). Основные принципы физики (второе изд.). Лондон: Джон Мюррей. ISBN 0-7195-3382-1 . OCLC 7102249 .
- ^ Ханрахан, Вэл; Поркесс, Р. (2003). Дополнительная математика для OCR . Лондон: Ходдер и Стоутон. п. 219. ИСБН 0-340-86960-7 .
- ^ Кейт Джонсон (2001). Физика для вас: пересмотренное издание национальной учебной программы для GCSE (4-е изд.). Нельсон Торнс. п. 135. ИСБН 978-0-7487-6236-1 .
5 символов запоминаются как «суват». По любым трем можно найти два других.
- ^ Халперн, Элвин М. (1988). 3000 решенных задач по физике . Серия Шаум. Нью-Йорк: МакГроу Хилл. ISBN 978-0-07-025734-4 . ОСЛК 27398318 .
- ^ Jump up to: а б с Клеппнер, Дэниел; Роберт Дж. Коленков (2010). Введение в механику . Кембридж: Издательство Кембриджского университета. ISBN 978-0-521-19821-9 . OCLC 573196466 .
- ^ Боль, HJ (1983). Физика вибраций и волн (3-е изд.). Чичестер [Сассекс]: Уайли. ISBN 0-471-90182-2 . OCLC 9392845 .
- ^ Р. Пенроуз (2007). Дорога к реальности . Винтажные книги. п. 474. ИСБН 978-0-679-77631-4 .
- ^ Jump up to: а б с д Киббл, TWB (1973). Классическая механика . Европейская серия по физике (второе изд.). Лондон, Великобритания: МакГроу Хилл. ISBN 0-07-084018-0 . OCLC 856410 .
- ^ Грант, И.С.; Филлипс, WR (1990). Электромагнетизм . Манчестерская серия по физике (2-е изд.). Уайли. ISBN 0-471-92712-0 . OCLC 21447877 .
- ^ Jump up to: а б Дж. А. Уилер; К. Миснер; К. С. Торн (1973). Гравитация . WH Freeman & Co. ISBN 0-7167-0344-0 .
- ^ Jump up to: а б CB Паркер (1994). Энциклопедия физики МакГроу Хилла (второе изд.). ISBN 0-07-051400-3 .
- ^ HD Янг; Р. А. Фридман (2008). Университетская физика (12-е изд.). Аддисон-Уэсли (Pearson International). ISBN 978-0-321-50130-1 .