Сферическая система координат

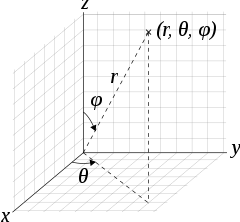
В математике сферическая система координат — это система координат для трехмерного пространства , где положение данной точки в пространстве задается тремя числами ( r , θ , φ ): радиальное расстояние радиальной линии r, соединяющей точку. к фиксированной точке начала координат (которая расположена на фиксированной полярной оси, оси зенитного направления или оси z ); полярный угол θ радиальной линии r ; и азимутальный угол φ радиальной линии r .
Полярный угол θ измеряется между осью z линией и радиальной r . Азимутальный угол φ измеряется между ортогональной проекцией радиальной линии r на опорную плоскость xy , которая ортогональна оси z и проходит через фиксированную исходную точку, и любой из фиксированных осей x или y . оси, обе из которых ортогональны оси z и друг другу. (См. рисунок, посвященный «физическому соглашению».)
Как только радиус фиксирован, три координаты (r, θ, φ), известные как тройка , образуют систему координат на сфере , обычно называемую сферическими полярными координатами . Примечание: в этой статье соблюдаются правила физики; (См. графики «соглашение по физике» и «соглашение по математике») .
Радиальное расстояние от фиксированной точки начала координат также называют радиусом , или радиальной линией , или радиальной координатой . Полярный угол можно назвать углом наклона , зенитным углом , нормальным углом или широтой . Пользователь может игнорировать угол наклона и вместо этого использовать угол возвышения , который измеряется вверх между опорной плоскостью и радиальной линией, т. е. от опорной плоскости вверх (в направлении положительной оси z) к радиальной линии. Угол склонения является отрицательным по отношению к углу возвышения. (См. рисунок, посвященный «физическому соглашению», а не «математическому соглашению».)
Как использование символов, так и порядок именования координат кортежа различаются в разных источниках и дисциплинах. В этой статье будет использоваться соглашение ISO. [1] часто встречается в физике , где кортеж именования задает следующий порядок: радиальное расстояние, полярный угол, азимутальный угол или . (См. рисунок, посвященный «физическому соглашению».) Напротив, соглашения во многих книгах и текстах по математике определяют порядок именования по-разному: радиальное расстояние, «азимутальный угол», «полярный угол» и или - который меняет использование и значение символов θ и φ . Могут также использоваться другие соглашения, например, r для радиуса от оси z , который не исходит от начальной точки. Особое внимание необходимо уделить проверке значения символов .


Согласно соглашениям о географических системах координат , положения измеряются широтой, долготой и высотой (высотой). Существует ряд небесных систем координат , основанных на разных фундаментальных плоскостях и с разными терминами для разных координат. В сферических системах координат, используемых в математике, обычно используются радианы , а не градусы ; (обратите внимание, что 90 градусов равны π /2 радиан). И эти системы математического соглашения могут измерять азимутальный угол против часовой стрелки (т. е. от южного направления оси X , или 180°, к восточному направлению оси Y , или +90°), а не измерять по часовой стрелке (т. е. от направление оси X на север, или 0°, по отношению к оси Y, направление на восток, или +90°), как это сделано в горизонтальной системе координат . [2] (См. рисунок «Математическое соглашение».)
Сферическую систему координат физического соглашения можно рассматривать как обобщение полярной системы координат в трехмерном пространстве . Ее можно далее распространить на пространства более высокой размерности, и тогда ее называют гиперсферической системой координат .
Определение [ править ]
Чтобы определить сферическую систему координат, необходимо обозначить исходную точку в пространстве O и два ортогональных направления: опорное направление зенита и опорное направление азимута . Эти варианты выбора определяют опорную плоскость, которая обычно определяется как содержащая исходную точку и оси x и y , каждая из которых может быть обозначена как опорное направление азимута . Базовая плоскость перпендикулярна (ортогональна) направлению зенита и обычно обозначается «горизонтально» по отношению к «вертикали» зенитного направления. Тогда сферические координаты точки P определяются следующим образом:
- Радиус O или радиальное расстояние — это евклидово расстояние начала координат до P. от
- Наклонение ) (или полярный угол — это угол со знаком от опорного направления зенита до отрезка OP . ( можно использовать высоту В качестве полярного угла вместо наклона ; см. ниже.)
- Азимут азимутальный (или угол ) — это угол со знаком, измеренный от опорного направления азимута до ортогональной проекции радиального отрезка OP на опорную плоскость.
Знак азимута определяется путем обозначения вращения, которое представляет собой положительный смысл поворота вокруг зенита. Этот выбор произволен и является частью определения системы координат. (Если наклон равен нулю или 180 градусам (= π радиан), азимут произволен. Если радиус равен нулю, то и азимут, и наклонение произвольны.)
Высота — это угол со знаком от базовой плоскости xy до сегмента радиальной линии OP , где положительные углы обозначены как направленные вверх, по направлению к зениту. Высота составляет 90 градусов (= π / 2 радиана) минус наклонение . Таким образом, если наклон составляет 60 градусов (= π / 3 радиан), то угол места равен 30 градусам (= π / 6 радиан).
В линейной алгебре вектор до от начала координат O точки P часто называют положения точки P. вектором
Соглашения [ править ]
Существует несколько различных соглашений для представления сферических координат и указания порядка именования их символов. Набор чисел из трех кортежей обозначает радиальное расстояние, полярный угол — «наклон» или, альтернативно, «возвышение» — и азимутальный угол. Это обычная практика в рамках физического соглашения, как указано в ISO стандарте 80000-2:2019 и ранее в ISO 31-11 (1992).
Как указано выше, в этой статье описывается «физическое соглашение» ISO, если не указано иное.
Однако некоторые авторы (включая математиков) используют символ ρ (rho) для обозначения радиуса или радиального расстояния, φ для обозначения наклона (или высоты) и θ для азимута, в то время как другие продолжают использовать r для радиуса; все это «обеспечивает логическое расширение обычных обозначений полярных координат». [3] Что касается порядка, некоторые авторы указывают азимут перед углом наклона (или места). Некоторые комбинации этих вариантов приводят к левой системе координат. Стандартный набор из трех кортежей «физической конвенции». конфликтует с обычными обозначениями двумерных полярных координат и трехмерных цилиндрических координат , где θ часто используется для обозначения азимута. [3]
Углы обычно измеряются в градусах (°) или радианах (рад), где 360° = 2 π рад. Использование градусов наиболее распространено в географии, астрономии и технике, где радианы обычно используются в математике и теоретической физике. Единица радиального расстояния обычно определяется контекстом, как это происходит в приложениях «единичной сферы», см. Приложения .
Когда система используется для обозначения физического трехпространства, принято присваивать положительные углы азимута, измеренные против часовой стрелки от исходного направления на опорной плоскости, если смотреть с «зенитной» стороны плоскости. Это соглашение используется, в частности, для географических координат, где направление «зенита» — север , а положительные углы азимута (долготы) отсчитываются на восток от некоторого нулевого меридиана .
| порядок установки координат | соответствующие местные географические направления ( Я , Икс , Y ) | правша/левша |
|---|---|---|
| ( r , θ inc , φ az,right ) | ( ИСПОЛЬЗОВАТЬ ) | верно |
| ( r , φ az,right , θ el ) | ( У , Е , Н ) | верно |
| ( r , θ el , φ az,right ) | ( У , Н , Е ) | левый |
Примечание: восточное направление ( E ), северное направление ( N ) , восходящее направление ( U ). В случае ( U , S , E ) местный азимутальный угол будет измеряться против часовой от S до E. стрелки
Уникальные координаты [ править ]
Любая тройка (или кортеж) сферических координат. определяет одну точку трехмерного пространства. С другой стороны, любая отдельная точка имеет бесконечное множество эквивалентных сферических координат. То есть пользователь может прибавлять или вычитать любое количество полных оборотов к угловым мерам, не изменяя сами углы, а значит, и точку. Во многих случаях удобно использовать отрицательные радиальные расстояния. , что эквивалентно для любых r , θ и φ . Более того, эквивалентно .



Когда необходимо определить уникальный набор сферических координат для каждой точки, пользователь должен ограничить диапазон, или интервал , каждой координаты. Обычный выбор:
- радиальное расстояние: r ≥ 0,
- полярный угол: 0° ≤ θ ≤ 180° или 0 рад ≤ θ ≤ π рад ,
- азимут: 0° ≤ φ < 360° или 0 рад ≤ φ < 2 π рад .
Но вместо интервала [0°, 360°) азимут φ обычно ограничивается полуоткрытым интервалом (−180°, +180°] или (− π , + π ] радиан, что является стандартным соглашением. для географической долготы.
Для полярного угла θ диапазон (интервал) наклона составляет [0°, 180°] , что эквивалентно диапазону возвышений (интервалу) [−90°, +90°] . В географии широта – это высота.
Даже с учетом этих ограничений, если полярный угол (наклонение) равен 0 ° или 180 °, а высота равна -90 ° или +90 °, то азимутальный угол является произвольным; а если r равно нулю, то азимут и полярные углы произвольны. Чтобы определить координаты как уникальные, пользователь может установить соглашение, согласно которому (в этих случаях) произвольные координаты устанавливаются в ноль.
График [ править ]
Чтобы построить любую точку по ее сферическим координатам ( r , θ , φ ) , где θ — наклон, пользователь должен: переместить r единиц от начала координат в опорном направлении зенита (ось z); затем повернуть на величину азимутального угла ( φ ) вокруг начала координат от назначенного опорного направления азимута (т. е. по оси x или y, см. определение выше); а затем повернуть от оси Z на угол θ .
Приложения [ править ]

Точно так же, как двумерная декартова система координат полезна (имеет широкий спектр применений) на плоской поверхности, двумерная сферическая система координат полезна на поверхности сферы. Например, одна сфера, описываемая в декартовых координатах уравнением x 2 + и 2 + я 2 = с 2 может быть описана в сферических координатах простым уравнением r = c . (В этой системе, показанной здесь в математическом соглашении , сфера адаптирована как единичная сфера , где радиус установлен равным единице, а затем его обычно можно игнорировать, см. рисунок.)
Это (единичная сфера) упрощение также полезно при работе с такими объектами, как матрицы вращения . Сферические координаты также полезны при анализе систем, которые имеют некоторую степень симметрии относительно точки, в том числе: интегралы объема внутри сферы; поле потенциальной энергии, окружающее концентрированную массу или заряд; или глобальное моделирование погоды в атмосфере планеты.

Трехмерное моделирование выходных характеристик громкоговорителей можно использовать для прогнозирования их характеристик. Требуется ряд полярных графиков, снятых при широком выборе частот, поскольку картина сильно меняется с частотой. Полярные графики помогают показать, что многие громкоговорители имеют тенденцию к всенаправленности на более низких частотах.
Важное применение сферических координат обеспечивает разделение переменных в двух уравнениях в частных производных — Лапласа и уравнениях Гельмгольца , — возникающих во многих физических задачах. Угловые части решений таких уравнений принимают форму сферических гармоник . Другое применение — эргономичный дизайн , где r — длина руки неподвижного человека, а углы описывают направление вытянутой руки. Сферическая система координат также часто используется при разработке 3D-игр для вращения камеры вокруг положения игрока. [4]
По географии [ править ]
Вместо наклона в географической системе координат используется угол возвышения (или широта ) в диапазоне (также известный как область ) −90° ≤ φ ≤ 90° и повернутый на север от плоскости экватора . Широта (т. е. угол широты) может быть либо геоцентрической широтой , измеренной (повернутой) от центра Земли и обозначаемой по-разному ψ , q , φ ′, φ c , φ g , либо геодезической широтой , измеренной (повернутой) от центра Земли. наблюдателя локальная вертикаль и обычно обозначается φ .Полярный угол (наклонение), составляющий 90° минус широта и колеблющийся от 0 до 180°, называется широтой в географии .
Угол азимута (или долгота ) данной позиции на Земле, обычно обозначаемый λ , измеряется в градусах к востоку или западу от некоторого обычного эталонного меридиана (чаще всего эталонного меридиана IERS ); таким образом, его область действия (или диапазон) составляет -180 ° ≤ λ ≤ 180 ° , и данное значение обычно обозначается «Восток» или «Запад». Для положений на Земле или другом твердом небесном теле за отсчетную плоскость обычно принимают плоскость, перпендикулярную оси вращения .
Вместо радиального расстояния r географы обычно используют высоту над или под некоторой местной базовой поверхностью ( вертикальной базой ), которой, например, может быть средний уровень моря . При необходимости радиальное расстояние можно вычислить по высоте, добавив радиус Земли , который составляет примерно 6360 ± 11 км (3952 ± 7 миль).
Однако современные географические системы координат довольно сложны, и координаты, определяемые этими простыми формулами, могут быть неточными на несколько километров. Точные стандартные значения широты, долготы и высоты в настоящее время определяются Всемирной геодезической системой (WGS) и учитывают сплющивание Земли на полюсах (около 21 км или 13 миль) и многие другие детали.
В планетарных системах координат используются формулировки, аналогичные географической системе координат.
В астрономии [ править ]
Ряд астрономических систем координат используется для измерения угла места в нескольких фундаментальных плоскостях . Эти опорные плоскости включают в себя: наблюдателя горизонт , галактический экватор (определяемый вращением Млечного Пути ), небесный экватор (определяемый вращением Земли), плоскость эклиптики ( определяемая орбитой Земли вокруг Солнца ) и плоскость земного терминатора (нормально к мгновенному направлению на Солнце ).
Преобразования системы координат [ править ]
Поскольку сферическая система координат является лишь одной из многих трехмерных систем координат, существуют уравнения для преобразования координат между сферической системой координат и другими.
Декартовы координаты [ править ]
Сферические координаты точки в соглашении ISO (т.е. для физики: радиус r , наклонение θ , азимут φ ) можно получить из ее декартовых координат ( x , y , z ) по формулам

Обратный тангенс, обозначенный через φ = arctan y / x должно быть определено соответствующим образом с учетом правильного квадранта ( x , y ) . См. статью на atan2 .
Альтернативно, преобразование можно рассматривать как два последовательных прямоугольных преобразования в полярные : первое в декартовой плоскости xy от ( x , y ) до ( R , φ ) , где R — проекция r на плоскость xy , и второй в декартовой плоскости zR от ( z , R ) до ( r , θ ) . Правильные квадранты для φ и θ подразумеваются правильностью преобразования плоских прямоугольных в полярные.
Эти формулы предполагают, что две системы имеют одно и то же происхождение, что сферическая плоскость отсчета является декартовой плоскостью xy , что θ представляет собой наклон относительно направления z и что азимутальные углы отсчитываются от декартовой оси x (так что y ось имеет φ = +90° ). Если θ измеряет высоту от базовой плоскости, а не наклон от зенита, то arccos выше становится arcsin, а cos θ и sin θ ниже меняются местами.
И наоборот, декартовы координаты могут быть получены из сферических координат ( радиус r , наклонение θ , азимут φ ), где r ∈ [0, ∞) , θ ∈ [0, π ] , φ ∈ [0, 2 π ) , по формуле

Цилиндрические координаты [ править ]
Цилиндрические координаты ( осевой радиус ρ , азимут φ , высота z ) можно преобразовать в сферические координаты ( центральный радиус r , наклонение θ , азимут φ ) по формулам

И наоборот, сферические координаты можно преобразовать в цилиндрические по формулам

Эти формулы предполагают, что две системы имеют одно и то же начало координат и одну и ту же плоскость отсчета, измеряют угол азимута φ в одинаковых направлениях от одной и той же оси и что сферический угол θ представляет собой наклон от цилиндрической оси z .
Обобщение [ править ]
Также можно иметь дело с эллипсоидами в декартовых координатах, используя модифицированную версию сферических координат.
Пусть P — эллипсоид, заданный множеством уровня

Модифицированные сферические координаты точки в P в соглашении ISO (т.е. для физики: радиус r , наклонение θ , азимут φ ) можно получить из ее декартовых координат ( x , y , z ) по формулам

Бесконечно малый элемент объема определяется выражением

Коэффициент квадратного корня происходит из свойства определителя , который позволяет извлечь константу из столбца:

Интегрирование и дифференцирование в сферических координатах [ править ]

Следующие уравнения (Iyanaga 1977) предполагают, что широта θ представляет собой наклон от положительной оси z , как в обсуждаемом физическом соглашении .
Линейный элемент для бесконечно малого перемещения от ( r , θ , φ ) до ( r + d r , θ + d θ , φ + d φ ) равен



Это дает преобразование из сферического в декартовое, обратное - обратное.Примечание: матрица является ортогональной матрицей , то есть ее инверсия — это просто ее транспонирование .
Таким образом, декартовы единичные векторы связаны со сферическими единичными векторами следующим образом:

Общая форма формулы для доказательства элемента дифференциальной линии: [5]


Чтобы применить это к настоящему случаю, нужно вычислить, как меняется с каждой из координат. В используемых соглашениях

Таким образом,

Искомые коэффициенты — это величины этих векторов: [5]

Элемент поверхности, простирающийся от θ до θ + d θ и от φ до φ + d φ на сферической поверхности с (постоянным) радиусом r , тогда равен

Таким образом, дифференциальный телесный угол равен

Элемент поверхности на поверхности с постоянным полярным углом θ (конус с вершиной в начале координат) равен

Элемент поверхности на поверхности постоянного азимута φ (вертикальная полуплоскость) равен

Элемент объема, простирающийся от r до r + d r , от θ до θ + d θ и от φ до φ + d φ , определяется определителем матрицы Якоби частных производных ,


Так, например, функцию f ( r , θ , φ ) можно проинтегрировать по каждой точке в R 3 тройным интегралом

Оператор del в этой системе приводит к следующим выражениям для градиента и лапласиана для скалярных полей:
![{\displaystyle {\begin{aligned}\nabla f&={\partial f \over \partial r}{\hat {\mathbf {r} }}+{1 \over r}{\partial f \over \partial \ theta }{\hat {\boldsymbol {\theta }}}+{1 \over r\sin \theta }{\partial f \over \partial \varphi }{\hat {\boldsymbol {\varphi }}},\ \[8pt]\nabla ^{2}f&={1 \over r^{2}}{\partial \over \partial r}\left(r^{2}{\partial f \over \partial r}\ right)+{1 \over r^{2}\sin \theta }{\partial \over \partial \theta }\left(\sin \theta {\partial f \over \partial \theta }\right)+{ 1 \over r^{2}\sin ^{2}\theta }{\partial ^{2}f \over \partial \varphi ^{2}}\\[8pt]&=\left({\frac { \partial ^{2}}{\partial r^{2}}}+{\frac {2}{r}}{\frac {\partial }{\partial r}}\right)f+{1 \over r ^{2}\sin \theta }{\partial \over \partial \theta }\left(\sin \theta {\frac {\partial }{\partial \theta }}\right)f+{\frac {1} {r^{2}\sin ^{2}\theta }}{\frac {\partial ^{2}}{\partial \varphi ^{2}}}f~,\\[8pt]\end{aligned }}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c085b5d702755a656ad961a224d007f50c7dfe76)

![{\displaystyle {\begin{aligned}\nabla \times \mathbf {A} = {}&{\frac {1}{r\sin \theta }}\left[{\partial \over \partial \theta }\ left(A_{\varphi }\sin \theta \right)-{\partial A_{\theta } \over \partial \varphi }\right]{\hat {\mathbf {r} }}\\[4pt]& {}+{\frac {1}{r}}\left[{1 \over \sin \theta }{\partial A_{r} \over \partial \varphi }-{\partial \over \partial r}\ left(rA_{\varphi }\right)\right]{\hat {\boldsymbol {\theta }}}\\[4pt]&{}+{\frac {1}{r}}\left[{\partial \over \partial r}\left(rA_{\theta }\right)-{\partial A_{r} \over \partial \theta }\right]{\hat {\boldsymbol {\varphi }}},\end {выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2c2477820afa14dd84fdaba95b49d463fba1ee65)
Далее, обратный якобиан в декартовых координатах равен


Расстояние в сферических координатах [ править ]
В сферических координатах даны две точки, где φ является азимутальной координатой.


Кинематика [ править ]
В сферических координатах положение точки или частицы (хотя лучше записать в виде тройки ) можно записать как [7]


![{\displaystyle {\begin{aligned}\mathbf {a} ={}&{\frac {\mathrm {d} \mathbf {v} {\mathrm {d} t}}\\[1ex]={} &{\hphantom {+}}\;\left({\ddot {r}}-r\,{\dot {\theta }}^{2}-r\,{\dot {\varphi }}^{ 2}\sin ^{2}\theta \right)\mathbf {\hat {r}} \\&{}+\left(r\,{\ddot {\theta }}+2{\dot {r} }\,{\dot {\theta }}-r\,{\dot {\varphi }}^{2}\sin \theta \cos \theta \right){\hat {\boldsymbol {\theta }}} \\&{}+\left(r{\ddot {\varphi }}\,\sin \theta +2{\dot {r}}\,{\dot {\varphi }}\,\sin \theta + 2r\,{\dot {\theta }}\,{\dot {\varphi }}\,\cos \theta \right){\hat {\boldsymbol {\varphi }}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cb548d3f8b0f22d189e8bca1bd0c6e4815908bb0)
Угловой момент


Соответствующий оператор углового момента следует из приведенной выше переформулировки в фазовом пространстве:

Крутящий момент задается как [7]

Кинетическая энергия определяется как [7]
![{\displaystyle E_{k}={\frac {1}{2}}m\left[\left({\dot {r}}\right)^{2}+\left(r{\dot {\theta }}\right)^{2}+\left(r{\dot {\varphi }}\sin \theta \right)^{2}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/635f4dc13b75d1e1b4fe939530265e5408b97921)
См. также [ править ]
- Небесная система координат – система указания положения небесных объектов.
- Система координат – метод указания положения точек.
- Del в цилиндрических и сферических координатах - математический оператор градиента в некоторых системах координат.
- Метод двойной сферы Фурье
- Высота (баллистика) - Угол в баллистике.
- Углы Эйлера - Описание ориентации твердого тела.
- Блокировка карданного подвеса - потеря одной степени свободы в трехмерном трехкарданном механизме.
- Гиперсфера – обобщенная сфера измерения n (математика).
- Матрица и определитель Якобиана - матрица всех частных производных первого порядка вектор-функции.
- Список канонических преобразований координат
- Сфера - набор точек, равноудаленных от центра.
- Сферическая гармоника — специальные математические функции, определенные на поверхности сферы.
- Теодолит - Оптический геодезический прибор.
- Векторные поля в цилиндрических и сферических координатах . Представление векторных полей в трехмерных криволинейных системах координат.
- Рыскание, тангаж и крен - основные направления в авиации.
Примечания [ править ]
- ^ «ISO 80000-2:2019 Величины и единицы. Часть 2: Математика» . ИСО . 19 мая 2020 г. стр. 20–21. Артикул №. 2-17.3 . Проверено 12 августа 2020 г.
- ^ Даффетт-Смит, П. и Цварт, Дж., стр. 34.
- ↑ Перейти обратно: Перейти обратно: а б Эрик В. Вайсштейн (26 октября 2005 г.). «Сферические координаты» . Математический мир . Проверено 15 января 2010 г.
- ^ «Математика видеоигр: полярная и сферическая система обозначений» . Академия интерактивных развлечений (АИЕ) . Проверено 16 февраля 2022 г.
- ↑ Перейти обратно: Перейти обратно: а б «Линейный элемент (dl) в выводе/схеме сферических координат» . Обмен стеками . 21 октября 2011 г.
- ^ https://math.stackexchange.com/questions/833002/distance-between-two-points-in-Sphereical-coordinates
- ↑ Перейти обратно: Перейти обратно: а б с д и Рид, Брюс Кэмерон (2019). Кеплеровы эллипсы: физика гравитационной задачи двух тел . Издательство Morgan & Claypool, Институт физики. Сан-Рафаэль [Калифорния] (40 Oak Drive, Сан-Рафаэль, Калифорния, 94903, США). ISBN 978-1-64327-470-6 . OCLC 1104053368 .
{{cite book}}: CS1 maint: местоположение ( ссылка ) CS1 maint: отсутствует местоположение издателя ( ссылка )
Библиография [ править ]
- Иянага, Сёкити; Кавада, Юкиёси (1977). Энциклопедический словарь математики . МТИ Пресс. ISBN 978-0262090162 .
- Морс П.М. , Фешбах Х. (1953). Методы теоретической физики . Часть I. Нью-Йорк: МакГроу-Хилл. п. 658. ИСБН 0-07-043316-Х . LCCN 52011515 .
- Маргенау Х. , Мерфи Г.М. (1956). Математика физики и химии . Нью-Йорк: Д. ван Ностранд. стр. 177–178 . LCCN 55010911 .
- Корн Г.А., Корн ТМ (1961). Математический справочник для ученых и инженеров . Нью-Йорк: МакГроу-Хилл. стр. 174–175. LCCN 59014456 . АСИН B0000CKZX7.
- Зауэр Р., Сабо I (1967). Математический инструментарий инженера . Нью-Йорк: Springer Verlag. стр. 95–96. LCCN67025285 .
- Мун П., Спенсер Д.Э. (1988). «Сферические координаты (r, θ, ψ)». Справочник по теории поля, включая системы координат, дифференциальные уравнения и их решения (исправленное 2-е изд., 3-е печатное изд.). Нью-Йорк: Springer-Verlag. С. 24–27 (табл. 1.05). ISBN 978-0-387-18430-2 .
- Даффетт-Смит П., Цварт Дж. (2011). Практическая астрономия с калькулятором или электронной таблицей, 4-е издание . Нью-Йорк: Издательство Кембриджского университета. п. 34. ISBN 978-0521146548 .