Маятник – это тело, подвешенное к неподвижной опоре так, что оно свободно раскачивается вперед и назад под действием силы тяжести. Когда маятник смещается вбок из своего положения покоя, равновесия, на него действует восстанавливающая сила гравитации, которая ускоряет его обратно к положению равновесия. При отпускании восстанавливающая сила, действующая на массу маятника, заставляет его колебаться около положения равновесия, раскачивая его вперед и назад. Математика маятников вообще довольно сложна. Можно сделать упрощающие предположения, которые в случае простого маятника позволяют аналитически решать уравнения движения при малоугловых колебаниях.
Простой гравитационный маятник. [1] представляет собой идеализированную математическую модель реального маятника. [2] [3] [4] Это груз (или боб ) на конце невесомого шнура подвешенного на шарнире , без трения . Поскольку в модели отсутствуют потери энергии на трение, при заданном начальном смещении оно раскачивается вперед и назад с постоянной амплитудой . Модель основана на предположениях:
Стержень или шнур невесомы, нерастяжимы и всегда остаются под натяжением.
Рассмотрим рисунок 1 справа, на котором показаны силы, действующие на простой маятник. Обратите внимание, что путь маятника очерчивает дугу круга. Угол θ измеряется в радианах , и это имеет решающее значение для этой формулы. Синяя стрелка — это гравитационная сила, действующая на груз, а фиолетовые стрелки — та же самая сила, разделенная на компоненты, параллельные и перпендикулярные мгновенному движению груза. Направление мгновенной скорости боба всегда указывает на красную ось, которая считается тангенциальной осью, поскольку ее направление всегда касается окружности. Рассмотрим второй закон Ньютона :
где F — сумма сил, действующих на объект, m — масса, а — ускорение. Уравнение Ньютона применимо только к касательной оси. Это связано с тем, что беспокойство вызывают только изменения скорости, и боб вынужден оставаться на круговой траектории. Короткая фиолетовая стрелка представляет собой компонент гравитационной силы на тангенциальной оси, и для определения ее величины можно использовать тригонометрию. Таким образом,
где g — ускорение силы тяжести вблизи поверхности Земли. Знак минус в правой части означает, что θ и a всегда направлены в противоположные стороны. Это имеет смысл, поскольку, когда маятник качнулся дальше влево, ожидается, что он ускорится обратно вправо.
Это линейное ускорение a вдоль красной оси можно связать с изменением угла θ по формулам длины дуги; s — длина дуги:
Изменение кинетической энергии (тело стартовало из состояния покоя) определяется выражением
Поскольку энергия не теряется, выигрыш в одном должен быть равен потерям в другом.
Изменение скорости при данном изменении высоты можно выразить как
Используя приведенную выше формулу длины дуги, это уравнение можно переписать в терминах dθ / дт :
где h — расстояние по вертикали, на котором упал маятник. Посмотрите на рисунок 2, на котором представлена тригонометрия простого маятника. Если маятник начинает качаться под некоторым начальным углом θ 0 , то y 0 , расстояние по вертикали от винта, определяется выражением
Аналогично, когда y 1 , тогда
Тогда h - это разница двух
С точки зрения dθ / dt дает
( уравнение 2 )
Это уравнение известно как первый интеграл движения . Оно определяет скорость в зависимости от местоположения и включает константу интегрирования, связанную с начальным перемещением ( θ 0 ). Затем продифференцируйте, применив цепное правило по времени, чтобы получить ускорение
что является тем же результатом, что и полученный при анализе сил.
Малоугловая аппроксимация синусоидальной функции: для θ ≈ 0 аппроксимацию sin θ ≈ θ . можно выполнить
Приведенное выше дифференциальное уравнение нелегко решить, и не существует решения, которое можно было бы записать в терминах элементарных функций. Однако добавление ограничения на размер амплитуды колебаний дает форму, решение которой можно легко получить. Если предполагается, что угол намного меньше 1 радиана (часто упоминается как менее 0,1 радиана, около 6 °), или
Пусть начальный угол равен θ 0 . Если предположить, что маятник выпущен с нулевой угловой скоростью , решение будет иметь вид
Движение представляет собой простое гармоническое движение , где θ 0 — амплитуда колебания (т. е. максимальный угол между стержнем маятника и вертикалью). Тогда соответствующий приблизительный период движения будет
Если используются единицы СИ (т.е. измерения в метрах и секундах) и предполагается, что измерения происходят на поверхности Земли, то g ≈ 9,81 м/с. 2 , и г / п 2 ≈ 1 м/с 2 (0,994 — приближение до 3 знаков после запятой).
Следовательно, относительно разумными приближениями длины и периода являются:
где Т 0 — количество секунд между двумя ударами (по одному удару на каждую сторону качания), а l измеряется в метрах.
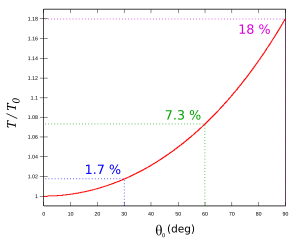
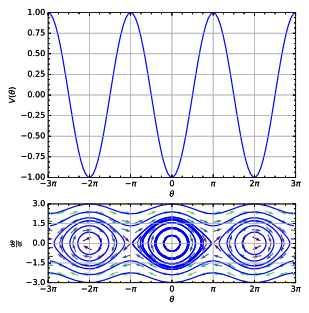
Рис. 3. Отклонение «истинного» периода маятника от малоуглового приближения периода. «Истинное» значение было получено путем численной оценки эллиптического интеграла. Рисунок 4. Относительные ошибки с использованием степенного ряда за период. Рис. 5. Потенциальная энергия и фазовый портрет простого маятника. Обратите внимание, что ось x , будучи углом, сворачивается сама на себя после каждых 2 π радиан.
Для амплитуд, выходящих за пределы приближения малого угла , можно вычислить точный период, сначала инвертировав уравнение для угловой скорости, полученное с помощью энергетического метода ( уравнение 2 ),
а затем интегрируя в течение одного полного цикла,
или вдвое больше полупериода
или четыре раза четверть цикла
что приводит к
Обратите внимание, что этот интеграл расходится по мере приближения θ 0 к вертикали.
так что маятник, обладающий достаточной энергией для вертикального движения, никогда не достигнет этой цели. (И наоборот, маятнику, близкому к своему максимуму, может потребоваться сколь угодно много времени, чтобы упасть вниз.)
Для сравнения приближения с полным решением рассмотрим период маятника длиной 1 м на Земле ( g = 9,806 65 м/с 2 ) при начальном угле 10 градусов составляет
Линейное приближение дает
Разница между двумя значениями, составляющая менее 0,2%, намного меньше, чем разница, вызванная изменением g в зависимости от географического положения.
Отсюда есть много способов приступить к вычислению эллиптического интеграла.
решение Лежандра для эллиптического Полиномиальное интеграла
где н !! обозначает двойной факториал , точное решение периода простого маятника:
На рисунке 4 показаны относительные ошибки с использованием степенного ряда. Т 0 представляет собой линейное приближение, а Т 2 - Т 10 включают соответственно члены со 2-й по 10-ю степени.
степенного ряда для эллиптического Решение интеграла
Другую формулировку приведенного выше решения можно найти, если рассматривать следующий ряд Маклорена:
используется в полиномиальном решении Лежандра, приведенном выше.Полученный степенной ряд: [5]
где M ( x , y ) — среднее арифметико-геометрическое x и y .
Это дает альтернативную и более быстро сходящуюся формулу для периода: [6] [7] [8]
Первая итерация этого алгоритма дает
Это приближение имеет относительную погрешность менее 1% для углов до 96,11 градусов. [6] С выражение можно записать более кратко как
Разложение второго порядка сводится к
Вторая итерация этого алгоритма дает
Это второе приближение имеет относительную погрешность менее 1% для углов до 163,10 градусов. [6]
Приближенные формулы для периода нелинейного маятника [ править ]
Хотя точный период можно определить для любой конечной амплитуды рад, оценивая соответствующий полный эллиптический интеграл , где , в приложениях этого часто избегают, поскольку невозможно выразить этот интеграл в замкнутой форме через элементарные функции. Это открыло путь для исследования простых приближенных формул увеличения периода маятника с амплитудой (полезных в лабораторных работах по вводной физике, классической механике, электромагнетизму, акустике, электронике, сверхпроводимости и т. д.). [9] Приближенные формулы, найденные разными авторами, можно классифицировать следующим образом:
Формулы «не очень больших углов», т.е. те, которые дают хорошие оценки для амплитуд ниже рад (естественный предел для боба на конце гибкой струны), хотя отклонение относительно точного периода монотонно увеличивается с амплитудой и непригодно для амплитуд, близких к рад. Одной из простейших формул, найденных в литературе, является следующая формула Лимы (2006): , где . [10]
Формулы «очень больших углов», то есть те, которые асимптотически аппроксимируют точный период для амплитуд, близких к рад, с ошибкой, монотонно возрастающей при меньших амплитудах (т. е. непригодной для малых амплитуд). Одной из лучших таких формул является формула Кромера, а именно: [11] .
Конечно, увеличение с амплитудой более очевиден, когда , как наблюдалось во многих экспериментах с использованием жесткого стержня или диска. [12] Поскольку точные таймеры и датчики в настоящее время доступны даже в лабораториях начальной физики, экспериментальные ошибки, обнаруженные в экспериментах «с очень большим углом», уже достаточно малы для сравнения с точным периодом и очень хорошим согласием между теорией и экспериментами, в которых трение было обнаружено незначительное. Поскольку многие преподаватели поощряли эту деятельность, искали простую приближенную формулу для периода маятника, действительную для всех возможных амплитуд, с которой можно было бы сравнить экспериментальные данные. В 2008 году Лима вывела средневзвешенную формулу с такой характеристикой: [9]
где , что дает максимальную ошибку всего 0,6% (при ).
На анимациях ниже показано движение простого маятника (без трения) с увеличением начального смещения качания или, что эквивалентно, с увеличением начальной скорости. Небольшой график над каждым маятником представляет собой соответствующую диаграмму фазовой плоскости ; горизонтальная ось — перемещение, а вертикальная ось — скорость. При достаточно большой начальной скорости маятник не колеблется вперед и назад, а полностью вращается вокруг оси вращения.
Начальный угол 0°, устойчивое равновесие.
Начальный угол 45°
Начальный угол 90°
Начальный угол 135°
Начальный угол 170°
Начальный угол 180°, неустойчивое равновесие.
Маятник, энергии которого едва хватает для полного раскачивания.
Маятник с достаточной энергией для полного раскачивания
Сложный маятник (или физический маятник ) — это маятник, стержень которого не является безмассовым и может иметь увеличенный размер; то есть твердое тело произвольной формы , качающееся на шарнире . В этом случае период маятника зависит от его момента инерции. вокруг точки поворота.
Важным понятием является эквивалентная длина , , длина простого маятника, имеющего одинаковую угловую частоту как сложный маятник:
Рассмотрим следующие случаи:
Простой маятник — это частный случай, когда вся масса сосредоточена на качающемся на расстоянии качающемся маятнике. от оси. Таким образом, и , поэтому выражение сводится к: . Уведомление , как и ожидалось (определение эквивалентной длины).
Однородный стержень массы и длина раскачивается с конца и , поэтому выражение сводится к: . Уведомление , однородный стержень колеблется, как если бы это был простой маятник длиной в две трети своей длины.
Тяжелый простой маятник: сочетание стержня однородной массы. и длина раскачиваясь со своего конца, и покачиваясь на другом конце. Тогда общая масса системы равна , а остальные параметры (по определению центра масс) и , поэтому выражение сводится к:
Где . Обратите внимание, что эти формулы можно преобразовать в два предыдущих случая, изученных ранее, просто считая массу стержня или боба равной нулю соответственно. Также обратите внимание, что формула зависит не от массы боба и стержня, а от их соотношения, . Приближение можно сделать для :
Приведенное выше обсуждение сосредоточено на раскачивании маятника, на который действует только сила гравитации. Предположим, на тело действует демпфирующая сила, например сопротивление воздуха, а также синусоидальная движущая сила. Эта система представляет собой затухающий, управляемый осциллятор и хаотична .
Член демпфирования и фактор воздействия можно добавить в правую часть, чтобы получить
где демпфирование предполагается прямо пропорциональным угловой скорости (это справедливо для сопротивления воздуха на малых скоростях, см. также Сопротивление (физика) ). и являются константами, определяющими амплитуду воздействия и степень демпфирования соответственно. – угловая частота движущих колебаний.
Разделив на :
Для физического маятника:
Это уравнение демонстрирует хаотическое поведение . Точное движение этого маятника можно определить только численно и оно сильно зависит от начальных условий, например, начальной скорости и стартовой амплитуды. Однако описанное выше приближение малого угла все же можно использовать при необходимых условиях для получения приближенного аналитического решения.
Эллиптическая функция Якоби , выражающая положение маятника как функцию времени, представляет собой двоякопериодическую функцию с действительным периодом и мнимым периодом. Реальный период — это, конечно, время, за которое маятник проходит один полный цикл. Пол Аппелл указал на физическую интерпретацию воображаемого периода: [16] если θ 0 — максимальный угол одного маятника, а 180° — θ 0 — максимальный угол другого, то действительный период каждого из них равен величине мнимого периода другого.
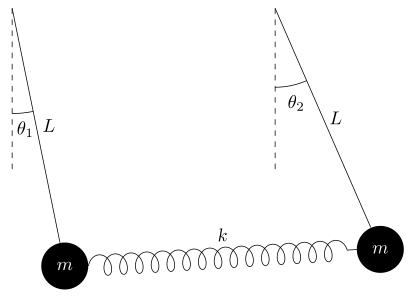
Два одинаковых простых маятника, соединенных пружиной, соединяющей бобышки.
Спаренные маятники могут влиять на движение друг друга либо посредством соединения направления (например, пружины, соединяющей бобы), либо посредством движений в опорной конструкции (например, столешнице). Уравнения движения двух одинаковых простых маятников, связанных пружиной, соединяющей бобышки, можно получить с помощью лагранжевой механики .
Кинетическая энергия системы равна:
где это масса бобов, длина строк, а , — угловые смещения двух шариков от положения равновесия.
что приводит к следующему набору связанных дифференциальных уравнений:
Поочередное сложение и вычитание этих двух уравнений и применение приближения малого угла дают два уравнения гармонического осциллятора в переменных и :
^ определено Кристианом Гюйгенсом: Гюйгенс, Кристиан (1673). «Horologium Oscillatorium» (PDF) . Математика 17 века . 17th Centurymaths.com . Проверено 1 марта 2009 г. , Часть 4, Определение 3, перевод Яна Брюса, июль 2007 г.
^ Сюэ, Линьвэй (2007). «Маятниковые системы» . Видеть и трогать структурные концепции . Кафедра гражданского строительства, унив. Манчестера, Великобритания . Проверено 10 декабря 2008 г.
^ Вайсштейн, Эрик В. (2007). «Простой маятник» . Мир науки Эрика Вайсштейна . Вольфрам Исследования . Проверено 9 марта 2009 г.
Сала, Кеннет Л. (1989). «Преобразования амплитудной функции Якобиана и ее расчет через среднее арифметико-геометрическое». СИАМ Дж. Математика. Анал . 20 (6): 1514–1528. дои : 10.1137/0520100 .
Arc.Ask3.Ru Номер скриншота №: de619421bfe42cfa26cf30e5b8d381a4__1717681740 URL1:https://arc.ask3.ru/arc/aa/de/a4/de619421bfe42cfa26cf30e5b8d381a4.html Заголовок, (Title) документа по адресу, URL1: Pendulum (mechanics) - Wikipedia
Данный printscreen веб страницы (снимок веб страницы, скриншот веб страницы), визуально-программная копия документа расположенного по адресу URL1 и сохраненная в файл, имеет: квалифицированную, усовершенствованную (подтверждены: метки времени, валидность сертификата), открепленную ЭЦП (приложена к данному файлу), что может быть использовано для подтверждения содержания и факта существования документа в этот момент времени. Права на данный скриншот принадлежат администрации Ask3.ru, использование в качестве доказательства только с письменного разрешения правообладателя скриншота. Администрация Ask3.ru не несет ответственности за информацию размещенную на данном скриншоте. Права на прочие зарегистрированные элементы любого права, изображенные на снимках принадлежат их владельцам. Качество перевода предоставляется как есть. Любые претензии, иски не могут быть предъявлены. Если вы не согласны с любым пунктом перечисленным выше, вы не можете использовать данный сайт и информация размещенную на нем (сайте/странице), немедленно покиньте данный сайт. В случае нарушения любого пункта перечисленного выше, штраф 55! (Пятьдесят пять факториал, Денежную единицу (имеющую самостоятельную стоимость) можете выбрать самостоятельно, выплаичвается товарами в течение 7 дней с момента нарушения.)



























































































 Начальный угол 0°, устойчивое равновесие.
Начальный угол 0°, устойчивое равновесие. Начальный угол 45°
Начальный угол 45° Начальный угол 90°
Начальный угол 90° Начальный угол 135°
Начальный угол 135° Начальный угол 170°
Начальный угол 170° Начальный угол 180°, неустойчивое равновесие.
Начальный угол 180°, неустойчивое равновесие. Маятник, энергии которого едва хватает для полного раскачивания.
Маятник, энергии которого едва хватает для полного раскачивания. Маятник с достаточной энергией для полного раскачивания
Маятник с достаточной энергией для полного раскачивания