Четырехзвенная связь
В изучении механизмов четырехзвенная рычажная связь , также называемая четырехзвенной , является простейшей замкнутой цепи подвижной рычажной системой . Он состоит из четырех тел , называемых стержнями или звеньями , соединенных в петлю четырьмя шарнирами . Как правило, соединения устроены таким образом, что звенья перемещаются в параллельных плоскостях, и узел называется плоским четырехзвенным рычажным механизмом . Также существуют и применяются на практике сферические и пространственные четырехзвенные связи. [1]

Плоская четырехзвенная связь [ править ]


Плоские четырехзвенные связи состоят из четырех звеньев, соединенных в петлю четырьмя шарнирами с одной степенью свободы . Соединение может быть либо вращающимся , также известным как штифтовое или шарнирное соединение, обозначаемым буквой R, либо призматическим соединением , также известным как скользящая пара, обозначаемым буквой P. [Примечание 1]
Ссылка, зафиксированная относительно зрителя, называется наземной ссылкой.
Звено, соединенное с землей посредством вращающегося шарнира, способного совершать полный оборот, называется кривошипным звеном .
Звено, соединенное с землей посредством поворотного соединения, которое не может совершить полный оборот, называется кулисным звеном.
Звено, соединяющееся с линией заземления призматическим соединением, называется ползунком. Ползунки иногда считаются кривошипами, имеющими шарнирный шарнир, расположенный на бесконечно большом расстоянии, перпендикулярном ходу ползунка.
Ссылка, соединяющая две другие ссылки, называется плавающей ссылкой или соединителем. Муфту, соединяющую кривошип и ползунок в одном кривошипно-шатунном механизме, часто называют шатуном , однако она также используется для обозначения любого типа муфты.
Существует три основных типа плоского четырехзвенного рычажного механизма в зависимости от использования вращательного или призматического шарнира:
- Четыре вращающихся соединения:
Он обозначается как RRRR и состоит из четырех звеньев, соединенных четырьмя вращающимися шарнирами. Плоская четырехсторонняя связь относится ко всем устройствам этого типа.
Примеры связей 4R включают в себя:- Двойная кривошипная связь
- Кривошипно-коромысло (педаль) (используется в насосных станциях )
- Двойная рычажная тяга (используется в рулевом управлении Аккермана )
- Параллелограмм (Параллельное движение) [Примечание 2] ) и антипараллелограммные связи (контрапараллелограмм, обратный параллелограмм, бабочка, галстук-бабочка).
- Дельтовидная (Галлоуэй) и трапециевидная (Арглин) связи.
- Три вращающихся соединения:
Он обозначается как RRRP, PRRR, RPRR или RRPR и состоит из четырех звеньев, соединенных тремя поворотными соединениями и одним призматическим соединением. Рычаг ползуна-кривошипа (RRRP) представляет собой один из типов конструкции, в котором одно звено представляет собой кривошип, который затем соединяется с ползунком посредством шатуна. Перевернутый ползун-кривошип — это еще один тип конструкции, в котором есть два кривошипа, а ползун действует как муфта.
Примеры связей 3R1P включают в себя:- Кривошипно-шатунный механизм (применяется в двигателях внутреннего сгорания )
- Механизм быстрого возврата Whitworth (использовался в ранних типах формирователей )
- Кривошипно-рычажный механизм быстрого возврата (используется в формовщиках)
- Фиксированный поршневой механизм (используется в ручных насосах )
- Два вращательных соединения и два призматических соединения:
Обозначается как ПРРП, [2] и состоит из двух ползунков, соединенных соединительным звеном. Ползунок удвоения относится ко всем аранжировкам этого типа.
Примеры связей 2R2P включают в себя:- Трамплин Архимеда (Эллиптический траммель)
- Механизм кулисного механизма (звено с прорезями) (используется в приводах клапанов )
- Муфта Олдема
Плоские четырехзвенные рычаги могут быть предназначены для управления самыми разными движениями и часто являются базовыми механизмами во многих машинах . В связи с этим кинематика и динамика плоских четырехзвенных связей также являются важными темами в машиностроении .
связь Плоская четырехсторонняя
Плоская четырехсторонняя связь, связи RRRR или 4R имеют четыре вращающихся шарнира. Одно звено цепи обычно фиксировано и называется наземным звеном , фиксированным звеном или рамкой . Две ссылки, подключенные к раме, называются заземленными ссылками и обычно являются входными и выходными ссылками системы, иногда называемыми входной ссылкой и выходной ссылкой . Последняя ссылка — это плавающая ссылка , которую также называют муфтой или шатуном, поскольку она соединяет вход с выходом.
Предполагая, что кадр горизонтальный, существует четыре возможности для входных и выходных связей: [2]
- Кривошип: может вращаться на полные 360 градусов.
- Кулиса: может вращаться в ограниченном диапазоне углов, за исключением 0° или 180°.
- Нулевой рычаг: может вращаться в ограниченном диапазоне углов, включая 0°, но не 180°.
- π-кулиса: может вращаться в ограниченном диапазоне углов, включая 180°, но не 0°.
Некоторые авторы не различают виды рокеров.
Состояние Грасхофа [ править ]
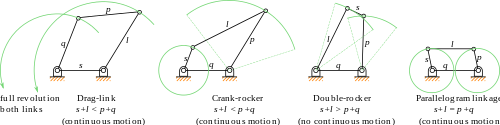
Условие Грасгофа для четырехзвенной связи гласит: если сумма самого короткого и самого длинного звена плоской четырехсторонней связи меньше или равна сумме двух оставшихся звеньев, то самое короткое звено может полностью вращаться относительно соседняя ссылка. Другими словами, условие выполняется, если S + L ≤ P + Q , где S — самая короткая ссылка, L — самая длинная, а P и Q — остальные ссылки.
Классификация [ править ]
Движение четырехсторонней связи можно разделить на восемь случаев в зависимости от размеров ее четырех звеньев. Пусть a, b, g и h обозначают длины входного кривошипа, выходного кривошипа, наземного звена и плавающего звена соответственно. Затем мы можем построить три термина:
- ;
- ;
- .



Движение четырехсторонней связи можно разделить на восемь типов на основе положительных и отрицательных значений этих трех терминов: T 1 , T 2 и T 3 . [2]
| Состояние Грасхофа | Входная ссылка | Выходная ссылка | |||
|---|---|---|---|---|---|
| − | − | + | Грасхоф | Рукоятка | Рукоятка |
| + | + | + | Грасхоф | Рукоятка | Рокер |
| + | − | − | Грасхоф | Рокер | Рукоятка |
| − | + | − | Грасхоф | Рокер | Рокер |
| − | − | − | Не Грасгоф | 0-Рокер | 0-Рокер |
| − | + | + | Не Грасгоф | p-Рокер | p-Рокер |
| + | − | + | Не Грасгоф | p-Рокер | 0-Рокер |
| + | + | − | Не Грасгоф | 0-Рокер | p-Рокер |



Случаи T 1 = 0, T 2 = 0 и T 3 = 0 интересны тем, что связи складываются. Если выделить складчатую четырехстороннюю связь, то имеется 27 различных случаев . [3]
На рисунке показаны примеры различных случаев плоского четырехстороннего сцепления. [4]

Конфигурацию четырехсторонней связи можно разделить на три типа: выпуклую, вогнутую и перекрестную. В выпуклом и вогнутом случаях никакие два звена не пересекаются друг с другом. В перекрестной связи два звена пересекаются друг с другом. В выпуклом случае все четыре внутренних угла меньше 180 градусов, а в вогнутом случае один внутренний угол больше 180 градусов. Существует простая геометрическая связь между длинами двух диагоналей четырехугольника. Для выпуклых и пересекающихся связей длина одной диагонали увеличивается тогда и только тогда, когда другая уменьшается. С другой стороны, для невыпуклых непересекающихся связей дело обстоит наоборот; одна диагональ увеличивается тогда и только тогда, когда увеличивается и другая. [5]
Проектирование четырехзвенных механизмов [ править ]
Синтез или проектирование четырехстержневых механизмов важно, когда вы стремитесь создать желаемое выходное движение для определенного входного движения. Чтобы минимизировать затраты и максимизировать эффективность, дизайнер выберет самый простой механизм для достижения желаемого движения. При выборе типа проектируемого механизма длины звеньев должны определяться с помощью процесса, называемого размерным синтезом. Размерный синтез включает в себя методологию итерации и анализа , которая при определенных обстоятельствах может оказаться неэффективным процессом; однако в уникальных сценариях точные и подробные процедуры для разработки точного механизма могут отсутствовать. [6]
Соотношение времени [ править ]
Коэффициент времени ( Q ) четырехзвенного механизма является мерой его быстрой отдачи и определяется следующим образом: [6]

В четырехрычажных механизмах предусмотрены два хода : прямой и обратный, которые при сложении образуют цикл. Каждый ход может быть идентичным или иметь разную среднюю скорость. Соотношение времени численно определяет, насколько быстрый ход вперед по сравнению с более быстрым обратным ходом. Полное время цикла ( Δt цикл ) механизма составляет: [6]

Большинство четырехстержневых механизмов приводятся в движение вращательным приводом или кривошипом, для которого требуется определенная постоянная скорость. Требуемая скорость ( ω crank ) связана со временем цикла следующим образом: [6]

Некоторые механизмы, производящие возвратно-поступательное или повторяющееся движение, предназначены для создания симметричного движения. То есть прямой ход машины движется с той же скоростью, что и обратный ход. Эти механизмы, которые часто называют линейными , обычно работают в обоих направлениях, поскольку они оказывают одинаковое усилие в обоих направлениях. [6]
Примеры механизмов симметричного движения включают:
- Дворники
- Механизмы двигателя или поршни
- Автомобильный рычаг стеклоподъемника
Другие приложения требуют, чтобы проектируемый механизм имел более высокую среднюю скорость в одном направлении, чем в другом. Эта категория механизмов наиболее желательна для проектирования, когда требуется работа только в одном направлении. Скорость, с которой выполняется этот один ход, также очень важна в некоторых случаях применения машины. В общем, возврат и рабочий неинтенсивный гребок должны выполняться как можно быстрее. Таким образом, большая часть времени в каждом цикле отводится на трудоемкий гребок. Эти механизмы быстрого возврата часто называют офсетными . [6]
Примеры механизмов компенсации включают в себя:
- Машины для резки
- Устройства для перемещения пакетов
При использовании механизмов смещения очень важно понимать, как и в какой степени смещение влияет на соотношение времени. Чтобы связать геометрию конкретной рычажной системы с моментом хода, угол дисбаланса ( β используется ). Этот угол связан с соотношением времени Q следующим образом: [6]

С помощью простой алгебраической перестановки это уравнение можно переписать для определения β : [6]

Временные диаграммы [ править ]
Временные диаграммы часто используются для синхронизации движения двух или более механизмов. Они графически отображают информацию, показывающую, где и когда каждый механизм находится в неподвижном состоянии или выполняет ход вперед и назад. Временные диаграммы позволяют конструкторам качественно описать требуемое кинематическое поведение механизма. [6]
Эти диаграммы также используются для оценки скоростей и ускорений некоторых четырехзвенных звеньев. Скорость звена — это скорость изменения его положения, а ускорение звена — это скорость изменения его скорости. И скорость, и ускорение являются векторными величинами, поскольку они имеют как величину, так и направление ; однако на временных диаграммах используются только их величины. При использовании двух механизмов временные диаграммы предполагают постоянное ускорение . Это предположение приводит к полиномиальным уравнениям для скорости как функции времени. Постоянное ускорение позволяет графику зависимости скорости от времени выглядеть как прямые линии, обозначая таким образом взаимосвязь между смещением ( ΔR ), максимальной скоростью ( v пик ), ускорением ( a ) и временем ( Δt ). Следующие уравнения показывают это. [6] [7]
- Δ Р = 1/2 В пик Δ t
- Δ Р = 1/4 ( а Δ т ) 2
Зная перемещение и время, можно рассчитать как максимальную скорость, так и ускорение каждого механизма в данной паре. [6]
Рычаг ползуна-кривошипа [ править ]

Рычажный механизм ползун-кривошип представляет собой четырехзвенную систему с тремя поворотными шарнирами и одним призматическим, или скользящим, шарниром. Вращение кривошипа приводит к линейному движению ползуна, или расширение газов против скользящего поршня в цилиндре может привести к вращению кривошипа.
Существует два типа ползунков: рядные и смещенные.
- В соответствии
- В рядном ползунке-кривошипе ползун расположен таким образом, что линия перемещения шарнирного соединения ползуна проходит через основное соединение кривошипа. Это создает симметричное движение ползуна вперед и назад при вращении кривошипа.
- Компенсировать
- Если линия перемещения шарнирного соединения ползуна не проходит через базовый шарнир кривошипа, движение ползуна несимметрично. В одном направлении он движется быстрее, чем в другом. Это называется механизмом быстрого возврата .
Сферические и пространственные четырехзвенные связи [ править ]
Если рычажный механизм имеет четыре шарнирных соединения с осями, расположенными под углом так, чтобы пересекаться в одной точке, то звенья движутся по концентрическим сферам, и узел называется сферическим четырехзвенным рычажным механизмом . Уравнения ввода-вывода сферической четырехзвенной связи могут быть применены к пространственным четырехзвенным связям, когда переменные заменены двойными числами . [8] Обратите внимание, что в цитируемом документе конференции неверно объединяются псевдообратные Мура-Пенроуза с односторонними обратными матрицами, ложно утверждая, что последние уникальны, когда бы они ни существовали. Этому противоречит тот факт, что допускает набор матриц как и все его левые инверсии .


Рычаг Беннета представляет собой пространственную четырехзвенную связь с шарнирными соединениями, оси которых расположены под определенным углом, что придает системе подвижность. [9] [10] [2]
 Универсальный шарнир.
Универсальный шарнир. Рулевое управление трактором
Рулевое управление трактором Четырехзвенная рычажная система Беннета.
Четырехзвенная рычажная система Беннета.



Примеры [ править ]
и связи механизмы Другие
- Чебышевская навеска
- Чебышевская лямбда-связь
- Связь Эванса "Кузнечик"
- Связь Хеккена
- Соединение «лошадь-голова»
- Пантограф
- Связь Робертса
- Клапанный механизм
- Связь Ватта
Приложения [ править ]
- Велосипедная подвеска
- Биологические связи
- Подвеска на двойных поперечных рычагах
- Дверной доводчик
- Складные ступеньки и складные стулья
- Машины с ножным управлением ( точильный камень , токарный станок , швейная машина , педаль и т. д.)
- Переключатель передач
- Планер (мебель)
- Осциллирующий вентилятор
- Тыква
- Наступить на мусорное ведро
- Стеклоочиститель
- Протез колена [11]
 Домкрат-насос для нефтяной скважины.
Домкрат-насос для нефтяной скважины. Тренируйте подвеску, используя рычаг Уотта .
Тренируйте подвеску, используя рычаг Уотта . Задняя подвеска автомобиля с использованием рычажного механизма Уатта.
Задняя подвеска автомобиля с использованием рычажного механизма Уатта. Подвеска для ВПК-3927 «Волк» . бронеавтомобилей семейства
Подвеска для ВПК-3927 «Волк» . бронеавтомобилей семейства Механизм доводчика двери.
Механизм доводчика двери. Швейная машина Howe Machine Co.
Швейная машина Howe Machine Co. Точильный камень с педальным приводом.
Точильный камень с педальным приводом. Токарно-винторезный станок с педальным управлением Brown Bros.
Токарно-винторезный станок с педальным управлением Brown Bros.
 Переключение передач на мотоцикле SV650S 2003 года выпуска .
Переключение передач на мотоцикле SV650S 2003 года выпуска . Складной стул.
Складной стул. Схема подвески горного велосипеда Specialized Stumpjumper FSR.
Схема подвески горного велосипеда Specialized Stumpjumper FSR. Анимация паровоза с клапанным механизмом Walscharts .
Анимация паровоза с клапанным механизмом Walscharts .













Моделирование [ править ]
 Шатунно-коромысло, 4-звенная рычажная связь:
Шатунно-коромысло, 4-звенная рычажная связь:
Cyan Link совершает настоящую революцию
Зеленая ссылка качается взад и вперед. Двухкривошипная 4-звенная рычажная система
Двухкривошипная 4-звенная рычажная система
Cyan Link совершает настоящую революцию
Зеленая ссылка совершает полную революцию. Двойное рокерное 4-звенное соединение:
Двойное рокерное 4-звенное соединение:
Желтая и зеленая ссылка качаются взад и вперед. Параллелограммные и антипараллелограммные 4-стержневые связи:
Параллелограммные и антипараллелограммные 4-стержневые связи:
(Демонстрация состояния изменения точки в середине) Параллелограммные и антипараллелограммные 4-стержневые связи (инверсии):
Параллелограммные и антипараллелограммные 4-стержневые связи (инверсии):
(Демонстрация состояния изменения точки в середине) Дельтовидная мышца/воздушный змей (Галлоуэй) 4-стержневая рычажная система:
Дельтовидная мышца/воздушный змей (Галлоуэй) 4-стержневая рычажная система:
Показаны обе инверсии:
• Кривошип-рокер
• Двойной кривошип Трапеция (Арглин) 4-х звеньевая связь:
Трапеция (Арглин) 4-х звеньевая связь:
Показаны все четыре уникальные инверсии:
• Кривошип-рокер
• Кривошип-рокер
• Двойной кривошип
• Двойной рокер







 Неподвижные и подвижные центроды , установленные на 4-звенном рычажном механизме с двойным кривошипом.
Неподвижные и подвижные центроды , установленные на 4-звенном рычажном механизме с двойным кривошипом. Муфта, родственная 4-барной системе кривошипно-коромыслового механизма.
Муфта, родственная 4-барной системе кривошипно-коромыслового механизма. Рулевая тяга Ackermann, в которой используется 4-х звеньевая тяга с двойным коромыслом.
Рулевая тяга Ackermann, в которой используется 4-х звеньевая тяга с двойным коромыслом. Четырехзвенная связь для аппроксимации .
Четырехзвенная связь для аппроксимации .





См. также [ править ]
- Теория Бурместера
- Родственная связь
- Пятизвенная связь
- Кинематический синтез
- Соединение (механическое)
- Тыква
- Шестизвенная связь
- Слайдер-кривошип
- Сферическая тригонометрия
- Прямолинейный механизм (примерными прямыми являются в основном четырехзвенные звенья )
- Универсальный шарнир
Примечания [ править ]
- ^ Иногда его также обозначают буквой «S» для обозначения ползуна, а не призматического соединения.
- ^ Это не следует путать со связью параллельного движения Уатта .
Ссылки [ править ]
- ^ Хартенберг, Р.С. и Дж. Денавит (1964) Кинематический синтез связей , Нью-Йорк: McGraw-Hill, онлайн-ссылка из Корнельского университета .
- ^ Jump up to: Перейти обратно: а б с д Дж. М. Маккарти и Г. С. Со, Геометрический дизайн связей, 2-е издание, Springer, 2010 г.
- ^ Цветкович, Ивана и Стойицевич, Миса и Попконстантинович, Бранислав и Цветкович, Драган. (2018). Классификация, геометрический и кинематический анализ четырехзвенных рычажных механизмов. 261-266. 10.15308/Синтеза-2018-261-266.
- ↑ Design of Machinery 3/e, Роберт Л. Нортон, 2 мая 2003 г., McGraw Hill. ISBN 0-07-247046-1
- ^ Туссен, Годфрид (2003). «Простые доказательства геометрического свойства четырехзвенных рычагов» (PDF) . Американский математический ежемесячник . 110 (6): 482–494. дои : 10.1080/00029890.2003.11919986 . S2CID 16625019 . Дополнительные доказательства .
- ^ Jump up to: Перейти обратно: а б с д и ж г час я дж к Мышка, Дэвид (2012). Машины и механизмы: прикладной кинематический анализ . Нью-Джерси: Pearson Education. ISBN 978-0-13-215780-3 .
- ^ Чакрабарти, Амареш (2002). Синтез инженерного проектирования: понимание, подходы и инструменты . Великобритания: Springer-Verlag London Limited. ISBN 978-1852334925 .
- ^ Анхелес, Хорхе (2012), «Двойные обобщенные обратные и их приложения в кинематическом синтезе», Последние достижения в кинематике роботов , Springer Нидерланды, стр. 1–10, doi : 10.1007/978-94-007-4620-6_1 , ISBN 9789400746190
- ^ Беннетт, Джеффри Томас (1903). «Новый механизм» . Инженерное дело . 76 (4 декабря 1903 г.): 777–778.
- ^ Хант, К.Х., Кинематическая геометрия механизмов, Оксфордская серия инженерных наук, 1979.
- ^ Phoengsongkhro, S., Tangpornprasert, P., Yotnuengnit, P. et al. Разработка четырехстержневого полицентрического коленного сустава со сгибанием колена в фазе опоры. Sci Rep 13, 22809 (2023). https://doi.org/10.1038/s41598-023-49879-4