Родственная связь

Верхний ряд: Четырехзвенные родственные связи .
Средний ряд: зубчатые пятизвенные родственные тяги , производные от верхнего ряда.
Нижний ряд: тесно связанные шестизвенные родственные связи , полученные из среднего ряда.
В кинематике , родственные связи — это связи которые обеспечивают одинаковую геометрию кривой муфты или соотношение ввода-вывода, но при этом отличаются по размерам. В случае четырехзвенной рычажной муфты родственников теорема Робертса-Чебышева , в честь Сэмюэля Робертса и Пафнутия Чебышева , [1] утверждает, что каждая кривая муфты может быть образована тремя различными четырехзвенными рычагами. Эти четырехстержневые связи можно построить с использованием подобных треугольников и параллелограммов, а также диаграммы Кэли (названной в честь Артура Кэли ).
Чрезмерно ограниченные механизмы могут быть получены путем соединения двух или более родственных связей вместе.
Теорема Робертса – Чебышева
[ редактировать ]Теорема утверждает, что для заданной кривой муфты, образованной четырехзвенной связью с четырьмя поворотными (шарнирными) шарнирами, существуют три четырехзвенные связи, три зубчатые пятизвенные связи и дополнительные шестизвенные связи, которые будут генерировать ту же самую путь.
Для кривой муфты, образованной четырехзвенной связью с четырьмя поворотными шарнирами и призматическим (скользящим) соединением, существуют только две четырехзвенные связи, поскольку третья будет состоять из двух ползунков, что делает ее четырехзвенной связью с две степени свободы.
Построение родственных четырехзвенных сцепок
[ редактировать ]Диаграмма Кэли
[ редактировать ]

Из исходного треугольника Δ A 1 DB 1 :
- Нарисуйте диаграмму Кэли.
- Используя параллелограммы, найдите A 2 и B 3 ▱O A A 1 DA 2 и ▱O B B 1 DB 3 .
- Используя подобные треугольники , найдите C 2 и C 3 Δ A 2 C 2 D и Δ DC 3 B 3 .
- Используя параллелограмм, O C ▱O CC DC 2 найдите 3 .
- Проверьте подобные треугольники ΔO A O C O B .
- Разделите левый и правый родственные слова.
- Нанесите размеры на диаграмму Кэли.
Размерные отношения
[ редактировать ]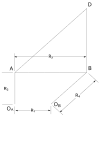
Длины четырех членов можно найти, используя закон синусов . И K L, и K R находятся следующим образом.

| Связь | Земля | Кривошип 1 | Кривошип 2 | Муфта |
|---|---|---|---|---|
| Оригинал | Р 1 | Р 2 | Р 3 | Р 4 |
| Левый родственник | К Л Р 1 | К Л Р 3 | К Л Р 4 | К Л Р 2 |
| Правый родственник | К Р Р 1 | К Р Р 2 | К Р Р 3 | К Р Р 4 |
Выводы
[ редактировать ]- Тогда и только тогда, когда оригинал представляет собой класса I. цепь Оба четырехзвенных родственника будут цепями класса I.
- Если оригинал представляет собой перетаскивающую ссылку ( двойной кривошип ), оба родственных слова будут перетаскиваемыми ссылками.
- Если исходный — кривошипно-кулисный , то один родственный будет кривошипно-кулисным, а второй — двойным коромыслом.
- Если оригинал представляет собой двойной рокер, родственными ему будут кривошипно-рокеры.

Построение зубчатых пятизвенных родственных
[ редактировать ]
Пятизвенная связь имеет две степени свободы, поэтому не существует пятизвенной связи, способной действовать как родственная. [Примечание 1] Однако можно создать родственный код с 5 тактами, используя шестерни.
- Выберите четырехзвенную связь по вашему выбору.
- Постройте два параллелограмма из центрального звена соединителя и звеньев, соединенных с землей.
- На каждом параллелограмме найдите стороны, противоположные соединительному звену. Примените между ними зубчатую передачу 1:1.
- Отдельные родственники.
Использование зубчатой передачи 1:1 используется из-за поведения параллелограммных связей. Противоположные «стороны» рычагов параллелограмма имеют одну и ту же функцию вращательного движения. Поскольку оба параллелограмма были построены на основе центрального соединительного звена, новые звенья, соединенные с землей, имеют одинаковые функции вращательного движения, что позволяет использовать зубчатую передачу 1:1 для соединения их вместе.
Построение родственных шестистержневых сцепок
[ редактировать ]

Розовая ссылка указывает на бывшую наземную ссылку, которая стала прямолинейной.
Альтернатива зубчатым пятизвенным аналогам
[ редактировать ]В родственном рычажном механизме с пятью звеньями используется зубчатая передача 1:1, обеспечивающая одинаковую функцию вращательного движения двух звеньев. Однако альтернативой использованию зубчатой передачи для достижения вращения 1:1 является соединение их вместе с помощью параллелограммной связи, добавив одно дополнительное звено.
Соединение ранее полученных родственных слов вместе
[ редактировать ]Важным свойством четырехзвенных связей является то, что после определения положения двух звеньев можно определить и два других звена в четырехзвенной связи.
Одной из характеристик родственных связей является то, что они часто имеют по крайней мере две ссылки в идентичной конфигурации. Эти звенья обычно ориентированы под углом 180 градусов друг к другу, поэтому при спаривании эти звенья могут соединяться. Это создает 4-звенную связь с двумя дополнительными звеньями, оба из которых определяются исходной четырехзвенной связью. Бывшее заземляющее звено плавкой 4-звенной связи становится прямолинейным звеном, которое перемещается по той же кривой муфты.
Каждую из этих парных шестизвенных родственных связей также можно преобразовать в другую родственную связь, перевернув связь и поменяв роли прямолинейной связи и наземной связи.
Построение родственных слов с большим количеством ссылок
[ редактировать ]Применяя метод пар из шести стержней, связи не обязательно должны перекрываться, а просто должны соответствовать такому критерию, что:
- Есть пара двух звеньев в одинаковой конфигурации.
- Бывшее заземляющее звено одной из тяг непосредственно прикреплено к точке, образующей кривую ответвителя.
Вместо того, чтобы перекрывать парные звенья, их можно прикрепить таким образом, чтобы образовался параллелограмм, в результате чего образовались родственные связи из восьми стержней.Также возможны тройные пары родственных связей и дальнейшие расширения, что позволяет теоретически неограниченно увеличивать количество звеньев родственных связей.
Родственные функции
[ редактировать ]
Родственные функции связи - это связи, которые имеют одни и те же функции движения для своих входных и выходных связей. Это осуществляется с помощью шестизвенной рычажной системы Watt II.
- Разделите шестизвенную связь на два четырехугольника (показано как и ).
- Перевести земной сустав в новое место, .
- С новым шлифовальным соединением , образуют два подобных четырехугольника (показаны как и ).
- Измените общую ссылку .
- Отдельные родственники.







Подобные четырехугольники будут иметь звенья, имеющие одну и ту же функцию движения. Поскольку одно звено является общим для двух четырехугольников, то, пока новые четырехугольники похожи на исходные, оба по-прежнему будут иметь общую связь с одной и той же функцией движения.
Если новые четырехугольники не имеют одного и того же заземляющего соединения (как показано на соединении C '), их все равно можно соединить вместе с помощью параллелограммной связи, образуя родственную 8-стержневую функцию.
См. также
[ редактировать ]- Артур Кэли - Диаграмма Кэли
- Четырехзвенная связь
- Кинематическая пара
- Соединение (механическое)
- Пафнутий Чебышев - Теорема Робертса – Чебышева
- Сэмюэл Робертс - Теорема Робертса – Чебышева
Примечания
[ редактировать ]- ^ Существуют определенные чрезмерно ограниченные конфигурации, у которых глубина резкости равна 0, однако они бесполезны при построении родственных связей.
Ссылки
[ редактировать ]- ^ Робертс и Чебышев (Спрингер). Проверено 12 октября 2012 г.
- Уикер, Джон Дж.; Пеннок, Гордон Р.; Шигли, Джозеф Э. (2003). Теория машин и механизмов . Издательство Оксфордского университета. ISBN 0-19-515598-Х .
- Сэмюэл Робертс (1875) «О движении трех стержней в плоском пространстве», Труды Лондонского математического общества , том 7.
- Хартенберг, Р.С. и Дж. Денавит (1964) Кинематический синтез связей , стр. 169, Нью-Йорк: McGraw-Hill, веб-ссылка из Корнельского университета .