Соединение параллельного движения

Размеры (длина a, b ):
Горизонтальное расстояние между швами ≈ 2 а
Таким образом, звено 1 (общее расстояние между швами заземления)

В кинематике рычаг параллельного движения представляет собой шестизвенную механическую связь, изобретенную шотландским инженером Джеймсом Уаттом в 1784 году для двойного действия паровой машины Уатта . Это позволяет стержню, движущемуся практически прямо вверх и вниз, передавать движение балке, движущейся по дуге, без значительной боковой нагрузки на стержень.
Описание
[ редактировать ]
В предыдущих двигателях, построенных Ньюкоменом и Ваттом, поршень тянул один конец балансира вниз во время рабочего хода с помощью цепи , а вес насоса тянул другой конец балки вниз во время такта восстановления с помощью второй цепи. переменные силы, вызывающие качательное движение балки. В новом двигателе двойного действия Ватта поршень производил мощность как при движении вверх, так и при движении вниз, поэтому для передачи силы на балку нельзя было использовать цепь. Уотт разработал параллельное движение для передачи силы в обоих направлениях, сохраняя при этом шток поршня очень близко к вертикали. Он назвал это «параллельным движением», потому что и поршень, и шток насоса должны были двигаться вертикально, параллельно друг другу.

В письме своему сыну в 1808 году, описывающем, как он пришел к этой конструкции, Джеймс Уотт писал: «Я больше горжусь параллельным движением, чем любым другим изобретением, которое я когда-либо делал». [1] На эскизе, который он включил, на самом деле показано то, что сейчас известно как связь Уотта , которая была связью, описанной в патенте Уотта 1784 года, но она была немедленно заменена параллельным движением. [2]
Параллельное движение отличалось от механизма Уотта тем, что в конструкцию было включено дополнительное соединение пантографа. Это не повлияло на основной принцип, но позволило уменьшить машинное отделение, поскольку рычажное соединение было более компактным. [2]
Поршень двигателя Ньюкомена двигался вниз под действием атмосферного давления. Устройство Ватта позволило использовать острый пар для непосредственной работы с обеих сторон поршня, тем самым почти удвоив мощность, а также подавая мощность более равномерно в течение цикла, что является преимуществом при преобразовании возвратно-поступательного движения во вращательное движение (будь то с помощью кривошипа). или через систему солнечной и планетарной передачи ).
Принцип работы
[ редактировать ]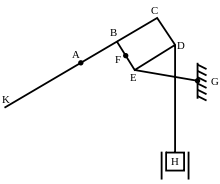
См. схему справа. А балансира KAC , который раскачивается вверх и вниз вокруг А. — шейка (подшипник ) H — поршень, который должен двигаться вертикально, а не горизонтально. Сердцем конструкции является четырехзвенная тяга, состоящая из AB , BE и EG , и базовая тяга AG , оба шарнира находятся на раме двигателя. Когда луч качается, точка F (которая нарисована для облегчения этого объяснения, но не является отмеченной точкой на самой машине) описывает вытянутую восьмерку (точнее, лемнискату Бернулли ) в воздухе. Поскольку движение шагающей балки ограничено небольшим углом, F описывает только короткий участок восьмерки, который довольно близок к вертикальной прямой. Восьмерка симметрична, пока плечи AB и EG равны по длине, и наиболее прямой, когда соотношение BF и FE соответствует соотношению AB и EG . Если длина хода (то есть максимальное перемещение F ) равна S , то прямой участок будет самым длинным, когда BE составляет около ⅔ S , а AB составляет 1,5. С. [3]
Можно было бы соединить F непосредственно со штоком поршня (конструкция «рычага Ватта»), но это придало бы машине неуклюжую форму: G находился бы далеко от конца балансира. Чтобы избежать этого, Ватт добавил параллелограммную связь ▱BCDE, чтобы сформировать пантограф . Это гарантирует, что F всегда лежит на прямой линии между A и D следовательно, движение D является увеличенной версией движения F. , и , Таким образом, D является точкой, к которой шток поршня DH прикреплен . Добавление пантографа сделало механизм короче, и поэтому здание, в котором находился двигатель, могло быть меньше.
Как уже отмечалось, путь F не является идеальной прямой, а лишь приближением. Конструкция Уотта приводила к отклонению примерно на одну 4000 от прямой линии. Позже, в 19 веке, были изобретены идеальные прямолинейные связи, начиная с связи Поселье-Липкина 1864 года.
См. также
[ редактировать ]- Пантограф , часть того, что использует механизм параллельного движения.
- Прямолинейный механизм
- Рычаг Уатта , основа работы механизма параллельного движения.
Ссылки
[ редактировать ]- ^ Jump up to: а б Франц Рёло, «Кинематика машин» (1876), стр. 4 .
- ^ Jump up to: а б Фергюсон, Юджин С. (1962). Материалы Музея истории и технологий: документ 27. Кинематика механизмов времен Ватта . Бюллетень Национального музея США. Том. 228. стр. 185–230. Также доступно по адресу https://www.gutenberg.org/files/27106/27106-h/27106-h.htm.
- ^ Нил Склейтер и Николас П. Хиронис, Справочник по механизмам и механическим устройствам, третье издание (2001), стр. 136.
- Общий
- Статья о связях в Британской энциклопедии, 1958 год.
- Статья о параллельном движении в Британской энциклопедии, 1911 год.
- Роберт Стюарт, «Описательная история парового двигателя» , Лондон, Дж. Найт и Х. Лейси, 1824 г.
Дальнейшее чтение
[ редактировать ]- Насколько круглый ваш круг? (Брайант и Сангвин, 2008) содержит главу о механизме параллельного движения Джеймса Уотта.