Радиус устойчивости
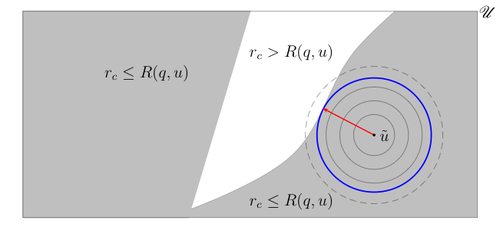
В математике радиус устойчивости объекта шара (системы, функции , матрицы , параметра ) в данной номинальной точке — это радиус наибольшего . с центром в номинальной точке, все элементы которого удовлетворяют заранее заданным условиям устойчивости Картина этого интуитивного понятия такова:

где обозначает номинальную точку, обозначает пространство всех возможных значений объекта , и заштрихованная область, , представляет собой набор точек, удовлетворяющих условиям устойчивости. Радиус синего круга, показанного красным, представляет собой радиус устойчивости.




Абстрактное определение
[ редактировать ]Формальное определение этого понятия варьируется в зависимости от области применения. Следующее абстрактное определение весьма полезно. [1] [2]

где обозначает замкнутый шар радиуса в сосредоточено в .


История
[ редактировать ]Похоже, что концепция была изобретена в начале 1960-х годов. [3] [4] В 1980-е годы он стал популярен в теории управления. [5] и оптимизация. [6] Он широко используется в качестве модели локальной устойчивости к небольшим изменениям заданного номинального значения интересующего объекта.
Связь с максимин-моделью Вальда
[ редактировать ]Было показано [2] что модель радиуса устойчивости является примером максимин-модели Вальда . То есть,

где

Большой штраф( ) представляет собой устройство, позволяющее игрок не должен нарушать номинальное значение за пределами радиуса устойчивости системы. Это указывает на то, что модель стабильности является моделью локальной стабильности/устойчивости, а не глобальной.


Теория принятия решений при информационном дефиците
[ редактировать ]Теория принятия решений в связи с информационным дефицитом — это новейшая невероятностная теория принятия решений. Утверждается, что она радикально отличается от всех современных теорий принятия решений в условиях неопределенности. Но это было показано [2] что его модель устойчивости, а именно

на самом деле это модель радиуса устойчивости, характеризующаяся простым требованием устойчивости вида где обозначает рассматриваемое решение, обозначает интересующий параметр, обозначает оценку истинного значения и обозначает шар радиуса сосредоточено в .






Поскольку модели радиуса устойчивости предназначены для работы с небольшими возмущениями номинального значения параметра, модель устойчивости информационного разрыва измеряет локальную устойчивость решений в окрестности оценки. .
Снедович [2] утверждает, что по этой причине теория непригодна для рассмотрения серьезной неопределенности, характеризующейся плохой оценкой и огромным пространством неопределенности.
Альтернативное определение
[ редактировать ]Бывают случаи, когда удобнее определить радиус устойчивости несколько иначе. Например, во многих приложениях теории управления радиус устойчивости определяется как размер наименьшего дестабилизирующего возмущения номинального значения интересующего параметра. [7] Картина такая:

Более формально,

где обозначает расстояние от .


Радиус устойчивости функций
[ редактировать ]Радиус устойчивости f непрерывной функции ( в функциональном пространстве F ) относительно открытой области устойчивости D — это расстояние между f и множеством неустойчивых функций (относительно D ). Мы говорим, что функция устойчива относительно D если ее спектр находится в D. , Здесь понятие спектра определяется в каждом конкретном случае, как поясняется ниже.
Определение
[ редактировать ]Формально, если обозначить множество устойчивых функций через S(D) и радиус устойчивости через r(f,D) , то:

где C подмножество F. —
Обратите внимание, что если f уже нестабильна (относительно D ), то r(f,D)=0 (пока C содержит ноль).
Приложения
[ редактировать ]Понятие радиуса устойчивости обычно применяется к специальным функциям, таким как полиномы (спектр тогда является корнями) и матрицы (спектр - это собственные значения ). Случай, когда C является собственным подмножеством F, позволяет нам рассматривать структурированные возмущения (например, для матрицы нам могут потребоваться возмущения только в последней строке). Это интересная мера устойчивости, например, в теории управления .
Характеристики
[ редактировать ]Пусть f — ( комплексный ) многочлен степени n , C=F — множество многочленов степени меньше (или равной) n (которые мы отождествляем здесь с набором коэффициентов). возьмем В качестве D открытый единичный круг , а это значит, что мы ищем расстояние между полиномом и множеством устойчивых полиномов Шура . Затем:


где q содержит каждый базисный вектор (например, когда q — обычный степенной базис). Этот результат означает, что радиус устойчивости ограничен минимальным значением, которого f достигает на единичной окружности.

Примеры
[ редактировать ]- Полином (чьи нули — это корни восьмой степени из 0,9 ) имеет радиус устойчивости 1/80, если q — степенной базис, а норма — норма бесконечности. Таким образом, должен существовать многочлен g с (бесконечной) нормой 1/90 такой, что f + g имеет (по крайней мере) корень на единичной окружности. такая буква g Например, . Действительно, (f+g)(1)=0 и 1 находится на единичной окружности, а это означает, что f+g неустойчиво.


См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ Злобец С. (2009). Недифференцируемая оптимизация: Параметрическое программирование. Стр. 2607–2615, в Энциклопедии оптимизации, Флудас CA и Пардалос, редакторы PM, Springer.
- ^ Jump up to: а б с д Снедович, М. (2010). Взгляд с высоты птичьего полета на теорию принятия решений при информационном дефиците. Журнал рискового финансирования, 11(3), 268-283.
- ^ Уилф, HS (1960). Максимально стабильное численное интегрирование. Журнал Общества промышленной и прикладной математики, 8 (3), 537–540.
- ^ Милн, МЫ, и Рейнольдс, Р.Р. (1962). Методы пятого порядка численного решения обыкновенных дифференциальных уравнений. Журнал ACM, 9 (1), 64–70.
- ^ Хиндриксен, Д. и Притчард, А.Дж. (1986). Радиусы устойчивости линейных систем, Системы и управляющие буквы, 7, 1-10.
- ^ Злобец С. (1988). Характеристика оптимальности в моделях математического программирования. Acta Applicandae Mathematicae, 12, 113–180.
- ^ Пайс АБР и Вирт, Франция (1998). Анализ локальной робастности устойчивости потоков. Математика управления, сигналов и систем , 11, 289–302.