Расслабленный перекресток
Расслабленное пересечение m множеств соответствует классическомупересечение между наборами, за исключением того, что разрешено ослаблять несколько наборов, чтобы избежать пустого пересечения.Это понятие можно использовать для решения задач удовлетворения ограничений. которые являются непоследовательными из-за ослабления небольшого количества ограничений .Когда подход с ограниченной ошибкой рассматривается для оценки параметров ,расслабленное пересечение позволяет быть устойчивым в отношениинекоторым выбросам .
Определение
[ редактировать ]пересечение q -релаксированное m подмножеств из ,обозначается это совокупность всех которые принадлежат всем 's, кроме самое большее.Это определение иллюстрируется рисунком 1.







Определять

У нас есть
![{\displaystyle X^{\{q\}}=\lambda ^{-1}([mq,m]).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1a061a3400e3891d6b2019b6f5577398e3af8766)
Таким образом, характеристика q-релаксированного пересечения представляет собой задачу обращения множества . [1]
Пример
[ редактировать ]Рассмотрим 8 интервалов:
![{\displaystyle X_{1}=[1,4],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/af99892b7ed95bc8b01972b7be903134c2cba0f6)
![{\displaystyle X_{2}=\ [2,4],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f9531f6c8b6ff361af716c5c8155d0cd3007425b)
![{\displaystyle X_{3}=[2,7],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ba7b91e36dc6f2c88dfaa80d1ee0bf336644c5c7)
![{\displaystyle X_{4}=[6,9],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7fce11a196f5e840bf955d7d7bffb4c8cc86cf62)
![{\displaystyle X_{5}=[3,4],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6dd8dafdc016bd7fb9b7fcefe19a7a4dc7d471fb)
![{\displaystyle X_{6}=[3,7].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/562b9e580672a7c75318ac96a7995ec3fab13587)
У нас есть

![{\displaystyle X^{\{1\}}=[3,4],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d7928014128a53893e7d057601d027b84c9f9a0b)
![{\displaystyle X^{\{2\}}=[3,4],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/80dac0757559626654549f071041b301a8f90621)
![{\displaystyle X^{\{3\}}=[2,4]\чашка [6,7],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5ece0be4f2d5a10db46776a9c106ca65b79b96d4)
![{\displaystyle X^{\{4\}}=[2,7],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b3fc1592c25b36e319d639b0f5b52fb1e7b885fc)
![{\displaystyle X^{\{5\}}=[1,9],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/48f7fda52531e256cee2b6d9440d64ce21be8dae)
![{\displaystyle X^{\{6\}}=]-\infty ,\infty [.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dd443cc01f235d00232b0e04e637bff1a3f723b5)
Расслабленное пересечение интервалов
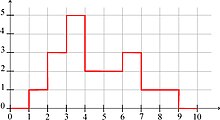
[ редактировать ]Расслабленное пересечение интервалов не обязательно является интервалом. Таким образом, мы принимаеминтервальная оболочка результата. Если это интервалы, расслаблениепересечение можно вычислить со сложностью m .log( m ), используя Алгоритм Марзулло . Этого достаточно, чтобыотсортировать все нижние и верхние границы интервалов m, чтобы представитьфункция . Тогда мы легко получаем набор

![{\displaystyle X^{\{q\}}=\lambda ^{-1}([mq,m])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/294b77be8504fee0a62cbc855b66de2badd9b759)
что соответствует объединению интервалов.Затем мы возвращаемнаименьший интервал, содержащий это объединение.
На рисунке 2 показана функция связанный с предыдущим примером.

Расслабленное пересечение коробок
[ редактировать ]Чтобы вычислить q -релаксированное пересечение m блоков , мы проецируем все m блоков относительно осей n .Для каждой из n групп по m интервалов мы вычисляем q -релаксированное пересечение.Мы возвращаем декартово произведение n полученных интервалов. [2] На рисунке 3 представлениллюстрация 4-расслабленного пересечения 6 ящиков. Каждая точкакрасный ящик принадлежит 4 из 6 ящиков.

Расслабленный союз
[ редактировать ]объединение q -релаксированное определяется

Обратите внимание, что когда q = 0, расслабленное объединение/пересечение соответствуетклассический союз/пересечение. Точнее, мы имеем

и

Закон де Моргана
[ редактировать ]Если обозначает дополнительный набор , у нас есть



Как следствие

Расслабление подрядчиков
[ редактировать ]Позволять быть подрядчиками для съемок ,затем

![{\displaystyle C([x])=\bigcap ^{\{q\}}C_{i}([x]).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/788587729f7e8ca9fb9fe1fdd1102cecdc2a0f1d)
является подрядчиком по и

![{\displaystyle {\overline {C}}([x])=\bigcap ^{\{mq-1\}}{\overline {C}}_{i}([x])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d59a6070cd4b8efebd4b14a71f7d2d0497ae2d7b)
является подрядчиком по , где


являются подрядчиками для

В сочетании с алгоритмом ветвей и границ, таким как SIVIA (инверсия множеств посредством интервального анализа), q -расслабленныйпересечение m подмножеств можно вычислить.
Приложение к оценке ограниченной ошибки
[ редактировать ]-релаксированное пересечение q можно использовать для надежной локализации. [3] [4] или для отслеживания. [5]
Надежные наблюдатели также могут быть реализованы с использованием расслабленных пересечений, чтобы быть устойчивыми к выбросам. [6]
Мы предлагаем здесь простой пример [7] для иллюстрации метода.Рассмотрим модель, выход i -й модели которой определяется выражением

где . Предположим, что мы имеем

![{\displaystyle f_{i}(p)\in [y_{i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/64f73d68f14eabca9ecdda9f468cc96106ecc7bd)
где и приведены следующим списком

![{\displaystyle [y_{i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e0733aa435bd20b12b259b38350ab7b3e2bd2a9d)
![{\displaystyle \{(1,[0;0,2]),(2,[0,3;2]),(3,[0,3;2]),(4,[0,1;0,2]),(5,[0,4 ;2]),(6,[-1;0.1])\}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/eefb2caf9e7b28cf4e0a7f3c3f7a3524bc186ba7)
Наборы для разных изображены наРисунок 4.


Ссылки
[ редактировать ]- ^ Жолен, Л.; Уолтер, Э.; Дидрит, О. (1996). Гарантированное надежное нелинейное ограничение параметров (PDF) . В материалах мультиконференции CESA'96 IMACS (симпозиум по моделированию, анализу и симуляции).
- ^ Жолен, Л.; Уолтер, Э. (2002). «Гарантированная робастная нелинейная минимаксная оценка» (PDF) . Транзакции IEEE при автоматическом управлении . 47 (11): 1857–1864. дои : 10.1109/TAC.2002.804479 .
- ^ Киффер, М.; Уолтер, Э. (2013). Гарантированная характеристика точных неасимптотических доверительных областей при нелинейной оценке параметров (PDF) . В материалах симпозиума МФБ по нелинейным системам управления, Тулуза: Франция (2013).
- ^ Древель, В.; Боннифе, доктор философии (2011). «Подход с использованием набора участников для высокоточного спутникового позиционирования с использованием высоты» . GPS-решения . 15 (4): 357–368. дои : 10.1007/s10291-010-0195-3 . S2CID 121728552 .
- ^ Лангервиш, М.; Вагнер, Б. (2012). «Гарантированное отслеживание мобильных роботов с использованием надежного распространения интервальных ограничений». Интеллектуальная робототехника и приложения . .
- ^ Жолен, Л. (2009). «Оценка состояния членства в устойчивом наборе; Приложение к подводной робототехнике» (PDF) . Автоматика . 45 : 202–206. дои : 10.1016/j.automatica.2008.06.013 .
- ^ Жолен, Л.; Киффер, М.; Уолтер, Э.; Мейзель, Д. (2002). «Гарантированная надежная нелинейная оценка с применением для локализации роботов» (PDF) . Транзакции IEEE в системах, человеке и кибернетике. Часть C: Приложения и обзоры . 32 (4): 374–381. дои : 10.1109/TSMCC.2002.806747 . S2CID 17436801 . Архивировано из оригинала (PDF) 28 апреля 2011 г.