Резольвер (электрический)
Резольвер используемый — это тип вращающегося электрического трансформатора, для измерения градусов вращения. Он считается аналоговым устройством и имеет цифровые аналоги, такие как цифровой резольвер , поворотный (или импульсный) энкодер .
Описание
[ редактировать ]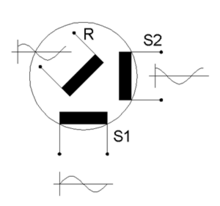

Наиболее распространенным типом резольвера является бесщеточный резольвер передатчика (остальные типы описаны в конце). Внешне резольвер этого типа может выглядеть как небольшой электродвигатель, имеющий статор и ротор. Внутри конфигурация обмоток провода делает его иным. Статорная часть резольвера содержит три обмотки: обмотку возбуждения и две двухфазные обмотки (обычно обозначаемые «x» и «y») (в случае бесщеточного резольвера). Обмотка возбуждения расположена сверху; это катушка вращающегося (вращающегося) трансформатора. Этот вращающийся трансформатор индуцирует ток в роторе без проводов и щеток, обеспечивая прямое электрическое соединение. Две другие обмотки находятся внизу и намотаны на пластину. Они настроены под углом 90 градусов друг к другу. Ротор содержит катушку, которая является вторичной обмоткой вращающегося трансформатора, и отдельную первичную обмотку в пластинах, возбуждающую две двухфазные обмотки статора.
Первичная обмотка трансформатора, закрепленная на статоре, возбуждается синусоидальным электрическим током, который за счет электромагнитной индукции индуцирует ток в роторе. Поскольку эти обмотки расположены на оси резольвера, независимо от их положения индуцируется один и тот же ток. Затем этот ток течет через другую обмотку ротора, в свою очередь индуцируя ток в его вторичных обмотках, а затем в двухфазных обмотках обратно на статор. Две двухфазные обмотки, закрепленные на статоре под прямым углом (90°) друг к другу, создают синусоидальный и косинусоидальный ток обратной связи. Относительные величины двухфазных напряжений измеряются и используются для определения угла ротора относительно статора. После одного полного оборота сигналы обратной связи повторяют свою форму. Это устройство может также иметь бесщеточный тип, т.е. состоящее только из двух пакетов пластин: ротора и статора.
Резольверы могут выполнять очень точное аналоговое преобразование из полярных координат в прямоугольные. Угол вала — это полярный угол, а напряжение возбуждения — это величина. Выходными данными являются компоненты [x] и [y]. Резольверы с четырехвыводными роторами могут вращать координаты [x] и [y], при этом положение вала задает желаемый угол вращения.
Резольверы с четырьмя выходными выводами представляют собой устройства общего назначения для синусоидальных/косинусных вычислений. При использовании с усилителями электронного драйвера и обмотками обратной связи, тесно связанными с входными обмотками, их точность повышается, и их можно каскадировать («цепи резольвера») для вычисления функций с несколькими членами, возможно, с несколькими углами, например, пушка (положение). приказы скорректированы с учетом крена и тангажа корабля.
Для оценки положения резольверно-цифровые преобразователи обычно используются . Они преобразуют синусоидальный и косинусный сигнал в двоичный сигнал (шириной от 10 до 16 бит), который легче использовать контроллеру.
Типы
[ редактировать ]Базовые резольверы являются двухполюсными, что означает, что угловая информация представляет собой механический угол статора. Эти устройства могут обеспечить абсолютное угловое положение. Другими типами резольверов являются многополюсные резольверы. Они имеют 2 p- полюса ( пары p- полюсов) и, таким образом, могут выполнять p циклов за один оборот ротора: электрический угол в p раз больше механического угла. Некоторые типы резольверов включают оба типа: двухполюсные обмотки, используемые для абсолютного положения, и многополюсные обмотки для точного положения. Двухполюсные резольверы обычно могут достигать угловой точности примерно до ±5 ' , тогда как многополюсный резольвер может обеспечить более высокую точность: до 10 дюймов для 16-полюсных резольверов и даже до 1 дюйма для 128-полюсных резольверов.
Многополюсные резольверы также могут использоваться для контроля многополюсных электродвигателей. Это устройство можно использовать в любом приложении, в котором требуется точное вращение объекта относительно другого объекта, например, в поворотной антенной платформе или роботе. На практике резольвер обычно монтируется непосредственно на электродвигатель. Сигналы обратной связи резольвера обычно отслеживаются на предмет нескольких оборотов другим устройством. Это позволяет уменьшить число вращающихся узлов и повысить точность резольверной системы.
Поскольку питание, подаваемое на резольверы, не производит фактической работы, для всех резольверов обычно используются низкие напряжения (<24 В переменного тока). Резолверы, предназначенные для наземного использования, обычно работают на частоте 50–60 Гц ( частота сети ), тогда как резольверы для морского или авиационного использования обычно работают на частоте 400 Гц (частота бортового генератора, приводимого в действие двигателями). В аэрокосмических приложениях используется частота от 2930 Гц до 10 кГц при напряжении от 4 В ( до 10 В среднеквадратичное значение) . Многие из аэрокосмических приложений используются для определения положения привода или моментного двигателя. Системы управления имеют тенденцию использовать более высокие частоты (5 кГц).
Другие типы резольверов включают:
- Резолверы приемника
- Эти резольверы используются противоположно резольверам передатчиков (типа, описанного выше). На две двухфазные обмотки подается напряжение, соотношение между синусом и косинусом представляет собой электрический угол. Система поворачивает ротор до получения нулевого напряжения в обмотке ротора. В этом положении механический угол ротора равен электрическому углу, приложенному к статору.
- Дифференциальные резольверы
- Эти типы сочетают в себе две двухфазные первичные обмотки в одной из стопок листов, как и в приемнике, и две двухфазные вторичные обмотки в другой. Отношение электрического угла, создаваемого двумя вторичными обмотками, к другим углам представляет собой вторичный электрический угол, механический угол и первичный электрический угол. Эти типы использовались, например, как аналоговые калькуляторы тригонометрических функций.
Родственным типом также является трансольвер , сочетающий в себе двухфазную обмотку, такую как резольвер, и трехфазную обмотку, такую как синхронизатор .
См. также
[ редактировать ]- CORDIC — алгоритм, используемый для вычисления гиперболических и тригонометрических функций.
- Инкрементальный энкодер
- ЛВДТ
- РВДТ
- синхронно
