Параметры Денавита–Хартенберга

В машиностроении параметры Денавита -Хартенберга (также называемые параметрами DH ) — это четыре параметра, связанные с определенным соглашением о прикреплении систем отсчета к звеньям пространственной кинематической цепи или манипулятора робота .
Жак Денавит и Ричард Хартенберг представили это соглашение в 1955 году, чтобы стандартизировать системы координат для пространственных связей . [ 1 ] [ 2 ]
Ричард Пол продемонстрировал свою ценность для кинематического анализа робототехнических систем в 1981 году. [ 3 ] Хотя было разработано множество соглашений о прикреплении систем отсчета, соглашение Денавита – Хартенберга остается популярным подходом.
Конвенция Денавита – Хартенберга
[ редактировать ]Обычно используемым соглашением для выбора системы отсчета в приложениях робототехники является соглашение Денавита и Хартенберга (D–H), которое было введено Жаком Денавитом и Ричардом С. Хартенбергом . В этом соглашении системы координат прикрепляются к соединениям между двумя ссылками так, что одно преобразование связано с соединением [ Z ] , а второе связано со ссылкой [ X ] . Преобразования координат вдоль последовательного робота, состоящего из n звеньев, образуют уравнения кинематики робота:
![{\displaystyle [T]=[Z_{1}][X_{1}][Z_{2}][X_{2}]\ldots [X_{n-1}][Z_{n}][X_{ п}]\!}](https://wikimedia.org/api/rest_v1/media/math/render/svg/823a3854e8d8c79fd94561aef7528569527d8eac)
где [ T ] — преобразование, характеризующее расположение и ориентацию конечного звена.
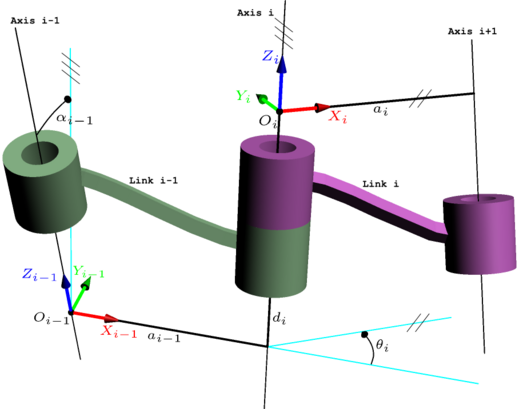
Чтобы определить преобразования координат [ Z ] и [ X ] , соединения, соединяющие звенья, моделируются как шарнирные или скользящие соединения, каждое из которых имеет уникальную линию S в пространстве, которая образует ось соединения и определяет относительное движение двух ссылки. характеризуется последовательностью из шести строк Si Типичный серийный робот ( i = 1, 2, ..., 6) , по одной для каждого сустава робота. каждой последовательности линий и Для Si + 1 существует общая нормальная линия Ai , i Si +1 . Система шести шарнирных осей S i и пяти общих нормалей A i , i +1 образует кинематический скелет типового шестистепенного серийного робота. Денавит и Хартенберг ввели соглашение, согласно которому оси координат z назначаются суставным осям Si , а оси координат x назначаются общим нормалям A i , i +1 .
Это соглашение позволяет определить движение звеньев вокруг общей шарнирной оси S i посредством перемещения винта :
![{\displaystyle [Z_{i}]={\begin{bmatrix}\cos \theta _{i}&-\sin \theta _{i}&0&0\\\sin \theta _{i}&\cos \theta _{i}&0&0\\0&0&1&d_{i}\\0&0&0&1\end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8563047c20a5956b10f7d757c727474f1c9f1d3f)
где θi — вращение вокруг, а di — скользящее движение вдоль оси z . Каждый из этих параметров может быть константой в зависимости от конструкции робота. Согласно этому соглашению размеры каждого звена последовательной цепи определяются смещением винта вокруг общей нормали i , i +1 от соединения S i до Si +1 A , которое определяется выражением
![{\displaystyle [X_{i}]={\begin{bmatrix}1&0&0&r_{i,i+1} \\0&\cos \alpha _{i,i+1}&-\sin \alpha _{i,i +1}&0\\0&\sin \alpha _{i,i+1}&\cos \alpha _{i,i+1}&0\\0&0&0&1\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b86a6ac69c0311b8a59ae3837c0eb91502e1e7b0)
где α i , i +1 и r i , i +1 определяют физические размеры линии связи с точки зрения угла, измеренного вокруг, и расстояния, измеренного вдоль оси X.
Вкратце, эталонные кадры расположены следующим образом:
- Ось z направлена в направлении оси сустава.
- Ось X параллельна общей нормали : (или вдали от z n –1 )
Если нет уникальной общей нормали (параллельных z осей ), то d (ниже) является свободным параметром. Направление x n — от z n –1 до z n , как показано на видео ниже. - ось y следует из осей x и z , если выбрать для нее правую систему координат .

Четыре параметра
[ редактировать ]
Следующие четыре параметра преобразования известны как параметры D – H: [ 4 ]
- d : смещение по предыдущему z до общей нормали
- θ : угол относительно предыдущего z от старого x к новому x
- r : длина общей нормали (также известная как a , но если вы используете это обозначение, не путайте с α ). Предполагая вращательное соединение, это радиус относительно предыдущего z .
- α : угол относительно общей нормали, от старой Z оси Z. до новой оси
В компоновке кадра есть некоторый выбор относительно того, указывает ли предыдущая ось x или следующая ось x вдоль общей нормали. Последняя система позволяет более эффективно разветвлять цепочки, поскольку все несколько фреймов могут указывать в сторону от своего общего предка, но в альтернативной схеме предок может указывать только на одного преемника. нижней цепи Таким образом, обычно используемые обозначения помещают каждую ось X коллинеарно с общей нормалью, что дает расчеты преобразования, показанные ниже.
Можно отметить ограничения на связи между осями:
- ось x n перпендикулярна z n –1 и z n осям
- ось x n пересекает z n –1 и z n оси
- начало соединения n находится на пересечении x n и z n
- y n завершает правую систему отсчета на основе x n и z n
Матрица Денавита – Хартенберга
[ редактировать ]Обычно винтовое смещение разделяют на произведение чистого перемещения вдоль линии и чистого вращения вокруг линии. [ 5 ] [ 6 ] так что
![{\displaystyle [Z_{i}]=\operatorname {Trans} _{Z_{i}}(d_{i})\operatorname {Rot} _{Z_{i}}(\theta _{i}),}](https://wikimedia.org/api/rest_v1/media/math/render/svg/acd112611a35f4af4eb7cbc7b1d146640e544675)
и
![{\displaystyle [X_{i}]=\operatorname {Trans} _{X_{i}}(r_{i,i+1})\operatorname {Rot} _{X_{i}}(\alpha _{i ,я+1}).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/158713cb1ead932df740dd529cebcdd2b963cbc9)
Используя это обозначение, каждое звено можно описать преобразованием координат из параллельной системы координат в предыдущую систему координат.
![{\displaystyle {}^{n-1}T_{n}=[Z_{n-1}]\cdot [X_{n}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c57b29eb10b34453f61996b33f7e3a6ddcfbee4f)
Обратите внимание, что это произведение двух перемещений винтов . Матрицы, связанные с этими операциями:
![{\displaystyle \operatorname {Trans} _{z_{n-1}}(d_{n})=\left[{\begin{array}{ccc|c}1&0&0&0\\0&1&0&0\\0&0&1&d_{n}\\ \hline 0&0&0&1\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/53384aa30ff82a2b85f6433f9cc439b9fecfa719)
![{\displaystyle \operatorname {Rot} _{z_{n-1}}(\theta _{n})=\left[{\begin{array}{ccc|c}\cos \theta _{n}&- \sin \theta _{n}&0&0\\\sin \theta _{n}&\cos \theta _{n}&0&0\\0&0&1&0\\\hline 0&0&0&1\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8f6829532da2c9b95b7838686240621a281d066b)
![{\displaystyle \operatorname {Trans} _{x_{n}}(r_{n})=\left[{\begin{array}{ccc|c}1&0&0&r_{n}\\0&1&0&0\\0&0&1&0\\\hline 0&0&0&1\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/32b9c367824bbe1639372c2a4805c99efd967a5f)
![{\displaystyle\operatorname {Rot}_{x_{n}}(\alpha_{n})=\left[{\begin{array}{ccc|c}1&0&0&0\\0&\cos \alpha_{n} &- \sin \easy _{n}&0\\0&\sin \easy _{n}&\cos easy _{n}&0\\\hline 0&0&0&1\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6323ca441a702b252b2d8521dde3ae9c1aa6b662)
Это дает:
![{\displaystyle\operatorname {} ^{n-1}T_{n}=\left[{\begin{array}{ccc|c}\cos\theta_{n}&-\sin\theta_{n} \cos \alpha _{n}&\sin \theta _{n}\sin \alpha _{n}&r_{n}\cos \theta _{n}\\\sin \theta _{n}&\cos \theta _{n}\cos \alpha _{n}&-\cos \theta _{n}\sin \alpha _{n}&r_{n}\sin \theta _ {n}\\0&\sin \easy _{n}&\cos easy _{n}&d_{n}\\\hline 0&0&0&1\end{array}}\right]=\left[{\begin{array}{ccc|c}&&&\\&R&&T\\&&&\\\hline 0&0&0&1\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6963d0c47a3a894ff0719c8df348d188b996074e)
где R — подматрица 3×3, описывающая вращение, а T — подматрица 3×1, описывающая перемещение.
В некоторых книгах порядок преобразования для пары последовательного вращения и перемещения (например, и ) перевернут. Это возможно (несмотря на то, что, вообще говоря, умножение матриц не является коммутативным), поскольку перемещения и вращения связаны с одними и теми же осями. и , соответственно. Поскольку порядок умножения матриц для этих пар не имеет значения, результат тот же. Например: .





Поэтому мы можем написать преобразование следующее:



Использование матриц Денавита и Хартенберга.
[ редактировать ]Обозначения Денавита и Хартенберга дают стандартную (дистальную) методологию записи кинематических уравнений манипулятора. Это особенно полезно для серийных манипуляторов, где матрица используется для представления позы (положения и ориентации) одного тела относительно другого.
Положение тела относительно может быть представлена матрицей позиций, обозначенной символом или





Эта матрица также используется для преобразования точки из кадра. к
![{\displaystyle M_{n-1,n}=\left[{\begin{array}{ccc|c}R_{xx}&R_{xy}&R_{xz}&T_{x}\\R_{yx}&R_{ yy}&R_{yz}&T_{y}\\R_{zx}&R_{zy}&R_{zz}&T_{z}\\\hline 0&0&0&1\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d2b6bdf3074d61dcd61ae2d946bef0aaf151841a)
Где верхний левый подматрица представляет собой относительное ориентация двух тел и верхний правый представляет их относительное положение или, более конкретно, положение тела в кадре n - 1, представленное элементом кадра n .


Положение тела по отношению к телу может быть получена как произведение матриц, представляющих позу в отношении и что из в отношении




Важным свойством матриц Денавита и Хартенберга является то, что обратная есть
![{\displaystyle M^{-1}=\left[{\begin{array}{ccc|c}&&&\\&R^{T}&&-R^{T}T\\&&&\\\hline 0&0&0&1\end {массив}}\вправо]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/882df2d7cbe95a1b08c0fc516b7e2d247cf5f84d)
где является одновременно транспонированием и обратной ортогональной матрицей , то есть .



Кинематика
[ редактировать ]Могут быть определены дополнительные матрицы для представления скорости и ускорения тел. [ 5 ] [ 6 ] Скорость тела по отношению к телу можно представить в рамке по матрице
![{\displaystyle W_{i,j(k)}=\left[{\begin{array}{ccc|c}0&-\omega _{z}&\omega _{y}&v_{x}\\\omega _{z}&0&-\omega _{x}&v_{y}\\-\omega _{y}&\omega _{x}&0&v_{z}\\\hline 0&0&0&0\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e502f568baa4e4d91f1733ea1f5f2ec0d0d41b42)
где угловая скорость тела по отношению к телу и все компоненты выражаются в фрейме ; это скорость одной точки тела по отношению к телу (полюс). Полюс – это точка проходящий через начало координат .


Матрицу ускорения можно определить как сумму производной скорости по времени плюс квадрат скорости.

Скорость и ускорение в кадре точки тела можно оценить как


Также можно доказать, что


Матрицы скорости и ускорения складываются по следующим правилам:


другими словами, абсолютная скорость представляет собой сумму родительской скорости плюс относительную скорость; для ускорения также присутствует член Кориолиса.
Компоненты матриц скорости и ускорения выражаются в произвольной системе координат. и преобразуем из одного кадра в другой по следующему правилу


Динамика
[ редактировать ]Для динамики необходимы еще три матрицы для описания инерции , линейный и угловой моменты , а силы и моменты наносится на тело.



Инерция :
![{\displaystyle J=\left[{\begin{array}{ccc|c}I_{xx}&I_{xy}&I_{xz}&x_{g}m\\I_{yx}&I_{yy}&I_{yz} &y_{g}m\\I_{zx}&I_{zy}&I_{zz}&z_{g}m\\\hline x_{g}m&y_{g}m&z_{g}m&m\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3e4d57dfa7fdd307bc63672a6c3c467edf6b76c3)
где это масса, представляют положение центра масс, а члены представляют инерцию и определяются как





Матрица действий , содержащий силу и крутящий момент :


![{\displaystyle \Phi =\left[{\begin{array}{ccc|c}0&-t_{z}&t_{y}&f_{x}\\t_{z}&0&-t_{x}&f_{y} \\-t_{y}&t_{x}&0&f_{z}\\\hline -f_{x}&-f_{y}&-f_{z}&0\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4368085c58c6e9ab64b78ecbb7cca5e33b54f820)
Матрица импульса , содержащий линейные и угловатый импульс


![{\displaystyle \Gamma =\left[{\begin{array}{ccc|c}0&-\gamma _{z}&\gamma _{y}&\rho _{x}\\\gamma _{z} &0&-\gamma _{x}&\rho _{y}\\-\gamma _{y}&\gamma _{x}&0&\rho _{z}\\\hline -\rho _{x}&-\rho _{y}&-\rho _{z}&0\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/73128fb4771872bdccff6c51dc5af41a17610bff)
Все матрицы представлены компонентами вектора в определенном кадре. . Трансформация компонентов из рамы обрамлять следует правилу


Описанные матрицы позволяют кратко записывать динамические уравнения.
Закон Ньютона:

Импульс:

Первое из этих уравнений выражает закон Ньютона и является эквивалентом векторного уравнения (сила равна массе, умноженной на ускорение) плюс (угловое ускорение в зависимости от инерции и угловой скорости); второе уравнение позволяет оценить линейный и угловой момент, когда известны скорость и инерция.


Измененные параметры DH
[ редактировать ]Некоторые книги, такие как «Введение в робототехнику: механика и управление» (3-е издание). [ 7 ] используйте модифицированные (проксимальные) параметры DH. Отличием классических (дистальных) параметров ЦТ от модифицированных параметров ЦЗ являются места привязки системы координат к звеньям и порядок выполняемых преобразований.
По сравнению с классическими параметрами DH, координаты кадра помещается на ось i - 1, а не на ось i в классическом соглашении DH. Координаты помещается на ось i , а не на ось i + 1 в классическом соглашении DH.


Другое отличие состоит в том, что согласно измененному соглашению матрица преобразования задается следующим порядком операций:

Таким образом, матрица модифицированных параметров DH принимает вид
![{\displaystyle\operatorname {} ^{n-1}T_{n}=\left[{\begin{array}{ccc|c}\cos\theta_{n}&-\sin\theta_{n} &0&a_{ n-1}\\\sin \theta _{n}\cos \alpha _{n-1}&\cos \theta _{n}\cos \alpha _{n-1}&-\sin \soft _{n-1}&-d_{n}\sin \soft _{n-1}\\\sin \theta _{n}\sin \soft _{ n-1}&\cos \theta _{n}\sin \soft _{n-1}&\cos \soft _{n-1}&d_{n}\cos \soft _{n-1}\\\hline 0&0&0&1\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c871f4e80e3c6be1cebb018cfb71de2f12e9e340)
Обратите внимание, что некоторые книги (например: [ 8 ] ) использовать и чтобы указать длину и крутку звена n - 1, а не звена n . Как следствие, формируется только с параметрами, использующими один и тот же индекс.



Опубликованы обзоры конвенций ЦТ и их различий. [ 9 ] [ 10 ]
См. также
[ редактировать ]- Передняя кинематика
- Обратная кинематика
- Кинематическая цепь
- Кинематика
- Конвенции по робототехнике
- Механические системы
Ссылки
[ редактировать ]- ^ Денавит, Жак; Хартенберг, Рихард Шойнеманн (1955). «Кинематическая запись механизмов младшей пары на основе матриц». Журнал прикладной механики . 22 (2): 215–221. дои : 10.1115/1.4011045 .
- ^ Хартенберг, Рихард Шойнеманн; Денавит, Жак (1965). Кинематический синтез связей . Серия McGraw-Hill по машиностроению. Нью-Йорк: МакГроу-Хилл. п. 435. Архивировано из оригинала 28 сентября 2013 г. Проверено 13 января 2012 г.
- ^ Пол, Ричард (1981). Роботы-манипуляторы: математика, программирование и управление: компьютерное управление роботами-манипуляторами . Кембридж, Массачусетс: MIT Press. ISBN 978-0-262-16082-7 . Архивировано из оригинала 15 февраля 2017 г. Проверено 22 сентября 2016 г.
- ^ Спонг, Марк В.; Видьясагар, М. (1989). Динамика и управление роботом . Нью-Йорк: Джон Уайли и сыновья. ISBN 9780471503521 .
- ^ Перейти обратно: а б Леньяни, Джованни; Казоло, Федерико; Ригеттини, Паоло; Заппа, Бруно (1996). «Гомогенный матричный подход к 3D-кинематике и динамике — I. Теория». Теория механизма и машин . 31 (5): 573–587. дои : 10.1016/0094-114X(95)00100-D .
- ^ Перейти обратно: а б Леньяни, Джованни; Казоло, Федерико; Ригеттини, Паоло; Заппа, Бруно (1996). «Гомогенный матричный подход к трехмерной кинематике и динамике — II. Приложения к цепям твердых тел и серийным манипуляторам». Теория механизма и машин . 31 (5): 589–605. дои : 10.1016/0094-114X(95)00101-4 .
- ^ Джон Дж. Крейг, Введение в робототехнику: механика и управление (3-е издание) ISBN 978-0201543612
- ^ Халил, Висама; Домбре, Этьен (2002). Моделирование, идентификация и управление роботами . Нью-Йорк: Тейлор Фрэнсис. ISBN 1-56032-983-1 . Архивировано из оригинала 12 марта 2017 г. Проверено 22 сентября 2016 г.
- ^ Липкин, Харви (2005). «Заметка об обозначениях Денавита – Хартенберга в робототехнике». Том 7: 29-я конференция по механизмам и робототехнике, части a и B. Том. 2005. стр. 921–926. дои : 10.1115/DETC2005-85460 . ISBN 0-7918-4744-6 .
- ^ Уолдрон, Кеннет; Шмиделер, Джеймс (2008). «Кинематика». Справочник Спрингера по робототехнике . стр. 9–33. дои : 10.1007/978-3-540-30301-5_2 . ISBN 978-3-540-23957-4 .