Конформная геометрическая алгебра
Конформная геометрическая алгебра ( CGA ) — это геометрическая алгебра, построенная на результирующем пространстве карты из точек n -мерного базового пространства R. п , д к нулевым векторам в R р +1, д +1 . Это позволяет представлять операции в базовом пространстве, включая отражения, вращения и перемещения, с использованием версоров геометрической алгебры; и обнаружено, что точки, линии, плоскости, круги и сферы получают особенно естественные и вычислительно доступные представления.
Эффект отображения заключается в том, что обобщенные (т.е. включая нулевую кривизну) , и так , что эффект перевода k-сферы в базовом пространстве отображаются на (k + 2)-лопасти (или любого конформного отображения ) базового пространства соответствует к вращению в многомерном пространстве. В алгебре этого пространства, основанной на геометрическом произведении векторов, такие преобразования соответствуют характерным для алгебры сэндвич-операциям, подобным использованию кватернионов для пространственного вращения в 3D , которые сочетаются очень эффективно. Следствием того, что роторы представляют преобразования, является то, что представления сфер, плоскостей, кругов и других геометрических объектов, а также соединяющие их уравнения преобразуются ковариантно. Геометрический объект ( k -сфера) может быть синтезирован как произведение клина k + 2 линейно независимых векторов, представляющих точки на объекте; и наоборот, объект можно разложить как повторяющееся произведение векторов, представляющих k + 2 различных точки на его поверхности. Некоторые операции пересечения также приобретают аккуратный алгебраический вид: например, для евклидова базисного пространства Р 3 , применение клинового произведения к двойственному тетравекторам, представляющим две сферы, дает двойственное тривекторному представлению их круга пересечения.
Поскольку эта алгебраическая структура непосредственно подходит для эффективных вычислений, она облегчает исследование классических методов проективной геометрии и инверсной геометрии в конкретной, простой в использовании среде. Он также использовался в качестве эффективной структуры для представления и облегчения вычислений в теории винтов . CGA особенно применялся в связи с проективным отображением повседневного евклидова пространства R. 3 в пятимерное векторное пространство R 4,1 , который исследовался на предмет применения в робототехнике и компьютерном зрении. Его вообще можно применить к любому псевдоевклидову пространству - например, к пространству Минковского R. 3,1 в пространство R 4,2 .
Этот раздел может потребовать очистки Википедии , чтобы соответствовать стандартам качества . ( февраль 2012 г. ) |
Строительство ЦГА
[ редактировать ]Обозначения и терминология
[ редактировать ]В этой статье основное внимание уделяется алгебре поскольку именно эта конкретная алгебра с течением времени была предметом наибольшего внимания; другие случаи кратко рассмотрены в отдельном разделе.Пространство, содержащее моделируемые объекты, называется здесь базовым пространством , а алгебраическое пространство, используемое для моделирования этих объектов, — представлением или конформным пространством. Однородное подпространство относится к линейному подпространству алгебраического пространства.

Термины для объектов: точка , линия , круг , сфера , квазисфера и т. д. используются для обозначения либо геометрического объекта в базовом пространстве, либо однородного подпространства пространства представления, которое представляет этот объект, причем последнее обычно подразумевается. если не указано иное. [а] Алгебраически будет использоваться любой ненулевой нулевой элемент однородного подпространства, при этом один элемент будет называться нормализованным по некоторому критерию.
Жирные строчные латинские буквы используются для обозначения векторов положения от начала координат до точки в базовом пространстве. Для остальных элементов пространства представления используются символы курсива.
Базовые и представительские пространства
[ редактировать ]Базовое пространство R 3 представляется путем расширения базиса для смещений из выбранного начала координат и добавления двух базисных векторов e - и e +, ортогональных базовому пространству и друг другу, с e - 2 = −1 и е + 2 = +1 , создавая пространство представления .
удобно использовать два нулевых вектора n o и n ∞ В качестве базисных векторов вместо e + и e − , где n o = ( e − − e + )/2 и n ∞ = e − + e + . Можно проверить, что где x находится в базовом пространстве, что:

Эти свойства приводят к следующим формулам для коэффициентов базисного вектора общего вектора r в пространстве представления базиса с элементами ei , ортогональными каждому другому базисному элементу:
- Коэффициент при n o для r равен − n ∞ ⋅ r
- Коэффициент при n ∞ для r равен − n o ⋅ r
- Коэффициент ei для r равен ei при −1 ⋅ р .
Сопоставление между базовым пространством и пространством представления
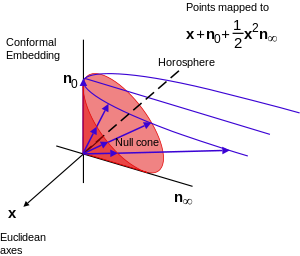
[ редактировать ]Отображение вектора в базовом пространстве (находящегося от начала координат до точки представленного аффинного пространства) задается формулой: [б]

Точки и другие объекты, которые отличаются только ненулевым скалярным коэффициентом, все сопоставляются с одним и тем же объектом в базовом пространстве. Когда желательна нормализация, например, для создания простой обратной карты точки из пространства представления в базовое пространство или определения расстояний, условие g ( x ) ⋅ n ∞ = −1 можно использовать .
Прямое отображение эквивалентно:
- сначала конформно проецируем x из e 123 на единичную 3-сферу в пространстве e + ∧ e 123 (в 5-D это находится в подпространстве r ⋅ (− n o − 1 / 2 n ∞ ) = 0 );
- затем поднимите его в проективное пространство, присоединив e – = 1 и отождествив все точки на одном и том же луче от начала координат (в 5-D это находится в подпространстве r ⋅ (− n o − 1 / 2 n ∞ ) = 1 );
- затем измените нормализацию, так что плоскость для однородной проекции задается координатой n o, имеющей значение 1 , т.е. r ⋅ n ∞ = −1 .
Обратное отображение
[ редактировать ]Обратное отображение для X на нулевом конусе задается (уравнение Первасса 4.37) формулой

Сначала это дает стереографическую проекцию светового конуса на плоскость r ⋅ n ∞ = −1 , а затем отбрасывает части n o и n ∞ , так что общий результат состоит в отображении всех эквивалентных точек αX = α ( н о + х + 1 / 2 x 2 п ∞ ) к Икс .
Начало координат и точка на бесконечности
[ редактировать ]Точка x = 0 в R п , д соответствует n o в R р +1, д +1 , поэтому n o идентифицируется как вектор (представления) точки в начале координат.
Вектор в R р +1, д +1 с ненулевым коэффициентом n ∞ , но нулевым коэффициентом n o , должен (с учетом обратного отображения) быть образом бесконечного вектора в R п , д . направление n∞ Таким образом , представляет собой (конформную) точку на бесконечности . Это мотивирует индексы o и ∞ для идентификации нулевых базисных векторов.
Выбор начала координат произволен: можно выбрать любую другую точку, поскольку представление представляет собой аффинное пространство . Начало координат просто представляет собой точку отсчета и алгебраически эквивалентно любой другой точке. Как и в случае любого перевода, изменение начала координат соответствует повороту в пространстве представления.
Геометрические объекты
[ редактировать ]Основа
[ редактировать ]Вместе с и , это 32 базисных лезвия алгебры.Начало плоской точки записывается как внешний продукт, поскольку геометрический продукт имеет смешанный класс.( ).



| Элементы | Геометрическая концепция |
|---|---|
| Точка и двойная сфера | |
| Без двухплоскостной | |
| Пара точек | |
| Бивектор | |
| Касательный вектор | |
| Вектор направления (плюс бивектор — двойная линия) | |
| Начало плоской точки * | |
| Круг | |
| 3D псевдоскаляр | |
| Касательный бивектор | |
| Направление бивектора (плюс это линия) | |
| Сфера | |
| Без это самолет | |











Как решение пары уравнений
[ редактировать ]Для любой ненулевой лопатки A представляющего пространства множество векторов, являющихся решениями пары однородных уравнений вида [3]


представляет собой объединение однородных 1-мерных подпространств нулевых векторов и, таким образом, является представлением набора точек в базовом пространстве. Это приводит к выбору лезвия А как удобного способа представления определенного класса геометрических объектов. Конкретными случаями для лопасти А (независимо от количества измерений пространства), когда базовым пространством является евклидово пространство, являются:
- скаляр: пустой набор
- вектор: одна точка
- бивектор: пара точек
- тривектор: обобщенный круг
- 4-вектор: обобщенная сфера
- и т. д.
Каждый из них можно разделить на три случая в зависимости от того, является ли A 2 является положительным, нулевым или отрицательным, соответствующим (в некоторых случаях в обратном порядке) указанному объекту, вырожденному случаю одной точки или отсутствию точек (где ненулевые решения X ∧ A исключают нулевые векторы).
Перечисленные геометрические объекты (обобщенные n -сферы ) становятся квазисферами в более общем случае, когда базовое пространство псевдоевклидово. [4]
Плоские объекты можно идентифицировать по точке, находящейся на бесконечности, которая включена в решения. Таким образом, если n ∞ ∧ A = 0 , объектом будет линия, плоскость и т. д., причем лопасть A соответственно имеет класс 3, 4 и т. д.
Как получено из точек объекта
[ редактировать ]Лезвие A, представляющее один из объектов этого класса, можно найти как внешнее произведение линейно независимых векторов, представляющих точки на объекте. В базовом пространстве эта линейная независимость проявляется в том, что каждая точка лежит вне объекта, определяемого другими точками. Так, например, четвертая точка, лежащая на обобщенной окружности, определяемой тремя различными точками, не может использоваться в качестве четвертой точки для определения сферы.
шансы
[ редактировать ]- Точки в e 123 отображаются на нулевой конус — нулевую параболу , если мы установим .

- Мы можем рассмотреть геометрическое положение точек в e 123st в конформном пространстве , для различных типов геометрического объекта А.

- Начнем с того, что заметим, что

сравнивать:
- х. а = 0 => х перп а; x.(a∧b) = 0 => x perp a и x perp b
- x∧a = 0 => x параллельно a; x∧(a∧b) = 0 => x параллельно a или b (или некоторой линейной комбинации)
представления внутреннего продукта и внешнего продукта связаны дуализацией
- х∧А знак равно 0 <=> х . A* = 0 ( проверка — работает, если x 1-dim, A n-1 dim)
г(х) . А = 0
[ редактировать ]- Точка R. место x в : 3 является точкой , если A в R 4,1 вектор на нулевом конусе.
- (Обратите внимание: поскольку это однородное проективное пространство, векторы любой длины на луче, проходящем через начало координат, эквивалентны, поэтому g(x).A =0 эквивалентно g(x).g(a) = 0).
- Сфера если : геометрическое место x является сферой, A = S, вектор вне нулевого конуса.
- Если тогда С. Х = 0 =>
- это точки, соответствующие сфере
- какие направления гиперболически ортогональны для вектора S вне нулевого конуса? (см. изображение преобразования Лоренца)
- в 2+1 D, если S равно (1,a,b) (используя координаты e-, {e+, e i }), точки, гиперболически ортогональные S, являются точками, евклидово ортогональными (-1,a, б) — т. е. самолет; или в n измерениях - гиперплоскость, проходящая через начало координат. Это разрезало бы другую плоскость не через начало координат в прямой (гиперповерхность в поверхности с n -2), а затем через конус в двух точках (соответственно, какая-то коническая поверхность с n -3). Так что это, вероятно, будет похоже на какую-то коническую форму. Это поверхность, которая является образом сферы под действием g .
- какие направления гиперболически ортогональны для вектора S вне нулевого конуса? (см. изображение преобразования Лоренца)


- Плоскость , : геометрическое место x является плоскостью если A = P , вектор с нулевым компонентом . В однородном проективном пространстве такой вектор P представляет собой вектор на плоскости n o =1, который находится бесконечно далеко от начала координат (т. е. бесконечно далеко за пределами нулевого конуса), поэтому g(x).P =0 соответствует x на сфера бесконечного радиуса, плоскость.
- В частности:
- соответствует x на плоскости с нормалью ортогональное расстояние α от начала координат.
- соответствует плоскости на полпути между a и b , с нормалью a - b



- круги
- касательные плоскости
- линии
- линии на бесконечности
- пары точек
Преобразования
[ редактировать ]- размышления
- Можно проверить, что формирование Pg ( x ) P дает новое направление на нуль-конусе g( x' ), где x' соответствует отражению в плоскости точек p в R. 3 которые удовлетворяют g( p ) . П = 0.
- г( Икс ) . А знак равно 0 => п г( Икс ) . А п знак равно 0 => п г( Икс ) п . P A P (и аналогично для клинового произведения), поэтому эффект применения сэндвич-моды P к любым величинам A в разделе выше аналогичным образом отражает соответствующее геометрическое положение точек x , поэтому соответствующие круги, сферы, линии и плоскости, соответствующие определенным типам A, отражаются точно так же, как применение P к g( x ) отражает точку x .
Эту операцию отражения можно использовать для создания общих перемещений и вращений:
- переводы
- Отражение в двух параллельных плоскостях дает перевод,
- Если и затем




- вращения
- соответствует элементу x' , который повернут вокруг начала координат на угол 2 θ, где θ — угол между a и b — тот же эффект, который имел бы этот ротор, если бы он был приложен непосредственно к x .

- общие ротации
- вращение вокруг общей точки может быть достигнуто путем сначала перемещения точки в начало координат, затем вращения вокруг начала координат, а затем перевода точки обратно в исходное положение, т. е. путем сэндвича с помощью оператора так


- винты
- Эффект винта или двигателя (вращение вокруг общей точки с последующим перемещением параллельно оси вращения) может быть достигнут путем размещения g( x ) оператором .
- M также можно параметризовать ( теорема Шаля )


- инверсии
- инверсия — это отражение в сфере — различные операции, которые можно осуществить с помощью таких инверсий, обсуждаются на сайте инверсной геометрии . В частности, комбинации инверсии вместе с евклидовыми преобразованиями перемещения и вращения достаточно, чтобы выразить любое конформное отображение , то есть любое отображение, которое универсально сохраняет углы. ( теорема Лиувилля ).
- расширения
- две инверсии с одним и тем же центром производят расширение .
Обобщения
[ редактировать ]Этот раздел пуст. Вы можете помочь, добавив к нему . ( февраль 2021 г. ) |
История
[ редактировать ]Этот раздел пуст. Вы можете помочь, добавив к нему . ( февраль 2021 г. ) |
Конференции и журналы
[ редактировать ]Вокруг Клиффорда и геометрической алгебры существует активное междисциплинарное сообщество с широким спектром приложений. К основным конференциям по этой теме относятся Международная конференция по алгебрам Клиффорда и их приложениям в математической физике (ICCA) и серия «Приложения геометрической алгебры в информатике и технике» (AGACSE) . Основным изданием является журнал Springer « Advances in Applied Clifford Algebras» .
Примечания
[ редактировать ]- ^ Для ясности, это однородное подпространство включает ненулевые векторы, которые не соответствуют ни одной точке базового пространства.
- ^ Отображение также можно записать F : x → −( x − e + ) n ∞ ( x − e + ) , как указано в Hestenes and Sobczyk (1984), стр.303. [1] Эквивалентность двух форм отмечена у Ласенби и Ласенби (2000). [2]
Ссылки
[ редактировать ]- ^ Хестенес, Дэвид и Гаррет Собчик (1984), От алгебры Клиффорда до геометрического исчисления: единый язык математики и физики . Дордрехт: Рейдель; стр. 302–303.
- ^ Ласенби, А.Н. и Ласенби, Дж (2000), Эволюция поверхности и представление с использованием геометрической алгебры ; в книге «Математика поверхностей IX: 9-я конференция IMA», Кембридж, 4–7 сентября 2000 г. , стр. 144–168.
- ^ Крис Доран (2003), Смешение круга и сферы с конформной геометрической алгеброй
- ^ Джейме Ваз-младший; Ролдан да Роча-младший (2016). Введение в алгебры и спиноры Клиффорда . Издательство Оксфордского университета. п. 140. ИСБН 9780191085789 .
Библиография
[ редактировать ]Книги
[ редактировать ]- Хестенес и др. (2000), в книге Г. Соммера (ред.), «Геометрические вычисления с алгеброй Клиффорда» . Спрингер Верлаг. ISBN 3-540-41198-4 ( книги Google ) ( https://davidhestenes.net/geocalc/html/UAFCG.html веб-сайт Hestenes)
- Ч. 1: Новые алгебраические инструменты для классической геометрии
- Ч. Глава 2. Обобщенные однородные координаты для вычислительной геометрии.
- Ч. Глава 3: Сферическая конформная геометрия с геометрической алгеброй
- Ч. Глава 4. Универсальная модель конформной геометрии евклидовых, сферических и дважды гиперболических пространств.
- Хестенес (2001), Э. Байро-Коррочано и Г. Собчик (ред.), « Достижения в геометрической алгебре с приложениями в науке и технике» , Springer Verlag. ISBN 0-8176-4199-8 Книги Google
- Старое вино в новых бутылках (стр. 1–14)
- Хестенес (2010), Э. Байро-Коррочано и Г. Шойерманн (2010), Геометрическая алгебра и вычисления в технике и информатике . Издательство Спрингер. ISBN 1-84996-107-7 ( книги Google ).
- Доран К. и Ласенби А. (2003), Геометрическая алгебра для физиков , Издательство Кембриджского университета. ISBN 0-521-48022-1 §10.2; п. 351 и последующие
- Дорст, Л. и др. (2007), Геометрическая алгебра для информатики , Морган-Кауфманн. ISBN 0-12-374942-5 Глава 13; п. 355 и последующие
- Винс, Дж. (2008), Геометрическая алгебра для компьютерной графики , Springer Verlag. ISBN 1-84628-996-3 Глава 11; п. 199 и последующие
- Первасс, К. (2009), Геометрическая алгебра с приложениями в технике , Springer Verlag. ISBN 3-540-89067-X §4.3: стр. 145 и последующие
- Байро-Корочано, Э. и Шойерманн Г. (2010, ред.), Геометрическая алгебра и вычисления в технике и информатике . Спрингер Верлаг. ISBN 1-84996-107-7 стр. 3–90.
- Байро-Коррочано (2010), Геометрические вычисления для вейвлет-преобразований, зрение роботов, обучение, управление и действие . Спрингер Верлаг. ISBN 1-84882-928-0 Глава 6; стр. 149–183
- Дорст Л. и Ласенби Дж. (2011, ред.), Руководство по геометрической алгебре на практике . Springer Verlag, стр. 3–252. ISBN 978-0-85729-810-2 .
- Дитмар Хильденбранд (2013). Основы вычислений по геометрической алгебре . Springer Science & Business Media. ISBN 978-3-642-31793-4 .
Интернет-ресурсы
[ редактировать ]- Уэрхэм, Р. (2006), Компьютерная графика с использованием конформной геометрической алгебры , докторская диссертация, Кембриджский университет, стр. 14–26, 31–67.
- Бромборский, А. (2008), Конформная геометрия с помощью геометрической алгебры (онлайн-слайды)
- Делл'Аква, А. и др. (2008), 3D-движение из структур точек, линий и плоскостей , Image and Vision Computing , 26 529–549
- Дорст, Л. (2010), Учебное пособие: Сохраняющее структуру представление евклидовых движений посредством конформной геометрической алгебры , в Э. Байро-Коррочано, Г. Шойерманне (ред.), Вычисление геометрической алгебры , Springer Verlag.
- Колапинто, П. (2011), Пространственные вычисления VERSOR с конформной геометрической алгеброй , магистерская диссертация, Калифорнийский университет в Санта-Барбаре
- Макдональд, А. (2013), Обзор геометрической алгебры и геометрического исчисления . (Интернет-заметки) §4.2: с. 26 и далее.
- по моторной алгебре над R п+1 :
- Эдуардо Байро Коррочано (2001), Геометрические вычисления для систем действия восприятия: концепции, алгоритмы и научные приложения . ( Google книги )