Машинное обоняние
В этой статье есть несколько проблем. Пожалуйста, помогите улучшить его или обсудите эти проблемы на странице обсуждения . ( Узнайте, как и когда удалять эти шаблонные сообщения )
|
Машинное обоняние – это автоматизированная имитация обоняния . Новое применение в современной технике, оно предполагает использование роботов или других автоматизированных систем для анализа химических веществ, находящихся в воздухе. Такой аппарат часто называют электронным носом или электронным носом. Развитие машинного обоняния осложняется тем фактом, что устройства «электронный нос» на сегодняшний день реагируют на ограниченное количество химических веществ, тогда как запахи производятся уникальными наборами (потенциально многочисленными) одорантных соединений. Технология, хотя все еще находится на ранних стадиях разработки, обещает множество применений, таких как: [1] контроль качества в пищевой промышленности , обнаружение и диагностика в медицине, [2] обнаружение наркотиков , взрывчатых веществ и других опасных или незаконных веществ , [3] реагирование на стихийные бедствия и экологический мониторинг .
Одним из типов предлагаемой технологии машинного обоняния является использование приборов с матрицей газовых датчиков, способных обнаруживать, идентифицировать и измерять летучие соединения. Однако критическим элементом в разработке этих инструментов является анализ закономерностей , а успешная разработка системы анализа закономерностей машинного обоняния требует тщательного рассмотрения различных проблем, связанных с обработкой многомерных данных: предварительная обработка сигналов, извлечение признаков , выбор признаков. , классификация , регрессия, кластеризация и проверка. [4] Еще одной проблемой в текущих исследованиях машинного обоняния является необходимость предсказать или оценить реакцию сенсора на ароматические смеси. [5] Некоторые проблемы распознавания образов при машинном обонянии, такие как классификация запахов и локализация запахов, могут быть решены с помощью методов ядра временных рядов. [6]
Обнаружение
[ редактировать ]Существует три основных метода обнаружения с использованием датчиков запаха из проводящего полимера (полипиррола), газовых датчиков на основе оксида олова и кварцевых датчиков микровесов. [ нужна ссылка ] Обычно они включают (1) массив датчиков определенного типа, (2) электронику для опроса этих датчиков и выдачи цифровых сигналов и (3) программное обеспечение для обработки данных и пользовательского интерфейса.
Вся система представляет собой средство преобразования сложных реакций датчиков в качественный профиль летучих веществ (или сложной смеси химических летучих веществ), составляющих запах, в форме выходного сигнала.
Обычные электронные носы не являются аналитическими инструментами в классическом понимании, и очень немногие утверждают, что способны количественно оценить запах. Эти инструменты сначала «обучаются» целевому запаху, а затем используются для «распознавания» запахов, чтобы будущие образцы можно было идентифицировать как «хорошие» или «плохие».
Исследования альтернативных методов распознавания образов для массивов химических датчиков предложили решения, позволяющие различать искусственное и биологическое обоняние, связанное с размерностью. Этот биологический подход предполагает создание уникальных алгоритмов обработки информации. [7]
Электронные носы способны различать запахи и летучие вещества из широкого спектра источников. В приведенном ниже списке показаны лишь некоторые из типичных применений технологии электронного носа, многие из которых подкреплены научными исследованиями и опубликованными техническими статьями.
Локализация запаха
[ редактировать ]Локализация запаха представляет собой комбинацию количественного химического анализа запаха и алгоритмов поиска пути, а условия окружающей среды играют жизненно важную роль в качестве локализации. Различные методы исследуются для разных целей и в разных реальных условиях.
Мотивация
[ редактировать ]Локализация запаха — это метод и процесс обнаружения летучего химического источника в среде, содержащей один или несколько запахов. Это жизненно важно для всех живых существ как для поиска средств к существованию, так и для предотвращения опасности. В отличие от других основных человеческих чувств , обоняние полностью основано на химических веществах. Однако по сравнению с другими измерениями восприятия обнаружение запаха сталкивается с дополнительными проблемами из-за сложных динамических уравнений запаха и непредсказуемых внешних возмущений, таких как ветер.
Приложение
[ редактировать ]Технология локализации запаха перспективна во многих приложениях, в том числе: [8] [1]
- контроль качества в пищевой промышленности (например, порча, бактериальная порча )
- определение источника опасных веществ (например: взрывчатых веществ и боевых отравляющих веществ )
- обнаружение подземных ресурсов или опасностей
- обнаружение запрещенных материалов (например: обнаружение наркотиков )
- поиск выживших после стихийных бедствий
- экологический мониторинг загрязняющих веществ
- ранняя диагностика заболеваний (например, при хронической обструктивной болезни легких ) [2]
История и постановка проблемы
[ редактировать ]Самым ранним инструментом для обнаружения специфических запахов был механический нос, разработанный в 1961 году Робертом Уайтоном Монкриффом. Первый электронный нос был создан У. Ф. Уилкенсом и Дж. Д. Хартманом в 1964 году. [9] Ларком и Холсолл обсуждали использование роботов для обнаружения запахов в атомной промышленности в начале 1980-х годов. [10] а исследования по локализации запахов были начаты в начале 1990-х годов. Локализация запаха в настоящее время является быстрорастущей областью. Были разработаны различные датчики и предложено множество алгоритмов для различных сред и условий.
Механическую локализацию запаха можно выполнить с помощью следующих трех этапов: (1) поиск присутствия летучего химического вещества (2) поиск положения источника с помощью набора датчиков запаха и определенных алгоритмов и (3) идентификация отслеживаемого объекта. источник запаха (распознавание запаха).
Методы локализации
[ редактировать ]Методы локализации запаха часто классифицируют по способам распространения запаха в различных условиях окружающей среды. Эти режимы обычно можно разделить на две категории: поток жидкости с преобладанием диффузии и поток жидкости с преобладанием турбулентности. У них разные алгоритмы локализации запаха, которые обсуждаются ниже.
Поток жидкости с преобладанием диффузии
[ редактировать ]Методы отслеживания и локализации потока жидкости с преобладанием диффузии, которые в основном используются для локализации запахов под землей, должны быть разработаны так, чтобы обонятельные механизмы могли работать в средах, в которых в движении жидкости преобладает вязкость. Это означает, что диффузия приводит к рассеиванию потока запаха, а концентрация запаха уменьшается от источника по закону распределения Гаусса . [11]
Диффузия паров химических веществ через почву без внешнего градиента давления часто моделируется вторым законом Фика :

где D — константа диффузии, d — расстояние в направлении диффузии, C — химическая концентрация и t — время.
Предполагая, что поток химического запаха распространяется только в одном направлении с однородным профилем поперечного сечения, соотношение концентрации запаха на определенном расстоянии и в определенный момент времени между концентрациями источников запаха моделируется как

где — концентрация источника запаха. Это самое простое динамическое уравнение при моделировании обнаружения запаха, игнорирующее внешний ветер или другие помехи. В рамках модели распространения с преобладанием диффузии были разработаны различные алгоритмы, просто отслеживающие градиенты химической концентрации для определения источника запаха.

кишечной палочки Алгоритм
[ редактировать ]Простой метод отслеживания — алгоритм E. coli . [12] В этом процессе датчик запаха просто сравнивает информацию о концентрации из разных мест. Робот движется по повторяющимся прямым линиям в случайных направлениях. Когда информация о текущем состоянии запаха улучшится по сравнению с предыдущим показанием, робот продолжит движение по текущему маршруту. Однако, если текущее состояние хуже предыдущего, робот вернется назад, а затем двинется в другом случайном направлении. Этот метод прост и эффективен, однако длина пути сильно варьируется, и количество ошибок увеличивается по мере приближения к источнику. [ нужны дальнейшие объяснения ]
Алгоритм шестнадцатеричного пути и алгоритм додекаэдра
[ редактировать ]Другой метод, основанный на модели диффузии, - это алгоритм шестнадцатеричного пути, разработанный Р. Эндрю Расселом. [12] для локализации подземных химических запахов с помощью заглубленного зонда, управляемого роботом-манипулятором. [12] [13] Зонд движется на определенной глубине по краям плотной гексагональной сетки. В каждом соединении состояний n существует два пути (левый и правый) для выбора, и робот выберет путь, который приводит к более высокой концентрации запаха, на основе информации о концентрации запаха в двух предыдущих состояниях перехода n −1 , n −2. . В 3D-версии алгоритма шестнадцатеричного пути , алгоритме додекаэдра, зонд движется по пути, который соответствует плотно упакованным додекаэдрам , так что в каждой точке состояния есть три возможных выбора пути.
Поток жидкости с преобладанием турбулентности
[ редактировать ]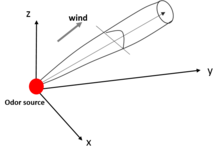
В потоке жидкости с преобладанием турбулентности методы локализации предназначены для рассмотрения фонового потока жидкости (ветра или воды) как прерывания турбулентности. Большинство алгоритмов этой категории основаны на моделировании шлейфа (рис. 1). [14]
Динамика шлейфа основана на гауссовых моделях, основанных на уравнениях Навье – Стокса . Упрощенное граничное условие модели, основанной на Гауссе:

где D x и D y – константы диффузии; - линейная скорость ветра в направлении x , — линейная скорость ветра в направлении y . Кроме того, предполагая, что окружающая среда однородна, а источник шлейфа постоянен, уравнение для обнаружения запаха в каждом датчике робота в каждый момент времени обнаружения t - th имеет вид



где — это t - th образец i - го датчика, коэффициент усиления, k интенсивность - источника , - местоположение k -го источника , – параметр затухания факела, это фоновый шум, который удовлетворяет . При моделировании шлейфа можно использовать различные алгоритмы для локализации источника запаха.







Алгоритм триангуляции
[ редактировать ]Простой алгоритм, который можно использовать для оценки местоположения, — это метод триангуляции (рис. 2). Рассмотрим приведенное выше уравнение обнаружения запаха. Положение источника запаха можно оценить, организовав расстояния до датчиков на одной стороне уравнения и игнорируя шум. Положение источника можно оценить с помощью следующих уравнений:



Метод наименьших квадратов (МНК)
[ редактировать ]Метод наименьших квадратов (LSM) — это немного сложный алгоритм локализации запаха. LSM-версия модели отслеживания запаха представлена следующим образом:

где — евклидово расстояние между узлом датчика и источником шлейфа, определяемое формулой:


Основное отличие алгоритма LSM от метода прямой триангуляции — это шум. В LSM учитывается шум, а местоположение источника запаха оценивается путем минимизации квадратичной ошибки. Нелинейная задача наименьших квадратов определяется следующим образом:

где — предполагаемое местоположение источника и представляет собой среднее значение нескольких измерений на датчиках, определяемое по формуле:



Оценка максимального правдоподобия (MLE)
[ редактировать ]Другой метод, основанный на моделировании шлейфа, - это оценка максимального правдоподобия (MLE). В этом методе локализации запаха определяются несколько матриц следующим образом:
![{\displaystyle Z=[{\frac {R_{1}-\mu _{1}}{\sigma _{1}}},{\frac {R_{2}-\mu _{2}}{\ сигма _{2}}},...{\frac {R_{N}-\mu _{N}}{\sigma _{N}}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cd5e365504e8acb95fd65d9da0849d8fd86b53f5)
![{\displaystyle G=diag[{\frac {\gamma _{1}}{\sigma _{1}}},{\frac {\gamma _{2}}{\sigma _{2}}},. ..{\frac {\gamma _{N}}{\sigma _{N}}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8223dad3dae108b8f0ff13d99944f03b42dd17a4)
![{\displaystyle D=[{\frac {1}{d_{1}^{2}}},{\frac {1}{d_{2}^{2}}},...{\frac {1 {d_{N}^{2}}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ad583fd563c7081bef2e6cf4bc4ce04f49de9f62)
![{\displaystyle \zeta =[\zeta _{1},\zeta _{2},...\zeta _{N}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f54def9ab385afd74efefb490f0a038c45cc8ae5)


С помощью этих матриц модель обнаружения запаха на основе шлейфа можно выразить следующим уравнением:

Затем MLE можно применить к моделированию и сформировать функцию плотности вероятности.

где – предполагаемое положение источника запаха, а логарифмическая функция правдоподобия –


Оценка параметра максимального правдоподобия можно рассчитать, минимизировав

а точное положение источника запаха можно оценить, решив:

Инфотакси
[ редактировать ]В 2007 году была предложена стратегия под названием «информаксис», в которой создается ментальная модель с использованием ранее собранной информации о том, где может находиться источник запаха. Робот движется в направлении, позволяющем получить максимум информации. [15] Инфотакси предназначено для отслеживания в турбулентной среде. Он был реализован как частично наблюдаемый марковский процесс принятия решений. [16] со стационарной мишенью в двумерной сетке. [17]
См. также
[ редактировать ]- Массив химических датчиков . Расположение химических датчиков.
- Химирезистор - материал, электрическое сопротивление которого меняется в зависимости от окружающей среды.
- Цифровая технология ароматов - изучение запахов вещей с помощью компьютера.
- Детектор взрывчатки Фидо
- Молекулярная коммуникация . Использование присутствия или отсутствия молекул для цифрового кодирования сообщений.
- Ольфактометр - прибор, используемый для обнаружения и измерения разбавления запаха.
Ссылки
[ редактировать ]- ^ Перейти обратно: а б «Спецвыпуск по машинному обонянию». Журнал датчиков IEEE . 11 (12): 3486. 2011. Бибкод : 2011ISenJ..11.3486. . дои : 10.1109/JSEN.2011.2167171 .
- ^ Перейти обратно: а б Геффен, Воутер Х. ван; Брюинз, Марсель; Керстьенс, Хуиб А.М. (1 января 2016 г.). «Диагностика вирусных и бактериальных респираторных инфекций при обострениях ХОБЛ с помощью электронного носа: пилотное исследование» . Журнал исследований дыхания . 10 (3): 036001. Бибкод : 2016JBR....10c6001V . дои : 10.1088/1752-7155/10/3/036001 . ISSN 1752-7163 . ПМИД 27310311 .
- ^ Стассен, И.; Букен, Б.; Рейнш, Х.; Оуденховен, JFM; Воутерс, Д.; Хаек, Дж.; Ван Спейбрук, В.; Сток, Н.; Верикекен, премьер-министр; Ван Шайк, Р.; Де Вос, Д.; Амелут, Р. (2016). «К полевым химическим сенсорам на основе металлорганического каркаса: UiO-66-NH 2 для обнаружения нервно-паралитических веществ» . хим. Наука . 7 (9): 5827–5832. дои : 10.1039/C6SC00987E . hdl : 1854/LU-8157872 . ПМК 6024240 . ПМИД 30034722 .
- ^ Гутьеррес-Осуна, Р. (2002). «Анализ закономерностей машинного обоняния: обзор». Журнал датчиков IEEE . 2 (3): 189–202. Бибкод : 2002ISenJ...2..189G . дои : 10.1109/jsen.2002.800688 .
- ^ Файсангиттисагул, Экачай; Нэгл, Х. Трой (2011). «Прогнозирование реакции смеси запахов на датчики обоняния машины». Датчики и исполнительные механизмы B: Химические вещества . 155 (2): 473–482. дои : 10.1016/j.snb.2010.12.049 .
- ^ Вембу, Шанкар; Вергара, Александр; Муэдзиноглу, Мехмет К.; Уэрта, Рамон (2012). «О функциях временных рядов и ядрах машинного обоняния». Датчики и исполнительные механизмы B: Химические вещества . 174 : 535–546. дои : 10.1016/j.snb.2012.06.070 .
- ^ Раман, Баранидхаран (декабрь 2005 г.). Сенсорное машинное обоняние с нейроморфными моделями обонятельной системы (доктор философии). Техасский университет A&M. hdl : 1969.1/4984 .
- ^ Мошаеди, Ата Джахангир. «Обзор на тему: Аспекты и препятствия робота для локализации запаха» . www.academia.edu . Проверено 12 ноября 2015 г.
- ^ Гарднер, Джулиан В.; Бартлетт, Филип Н. (1 марта 1994 г.). «Краткая история электронных носов». Датчики и исполнительные механизмы B: Химические вещества . 18 (1–3): 210–211. дои : 10.1016/0925-4005(94)87085-3 . (требуется подписка)
- ^ Ларкомб, MHE (1984). Робототехника в ядерной энергетике: телеоперация с помощью компьютера в опасных средах с особым упором на радиационные поля .
- ^ Ковадло, Гидеон; Рассел, Р. Эндрю (1 августа 2008 г.). «Локализация запаха робота: таксономия и исследование». Международный журнал исследований робототехники . 27 (8): 869–894. дои : 10.1177/0278364908095118 . ISSN 0278-3649 . S2CID 348058 .
- ^ Перейти обратно: а б с Рассел, Р. Эндрю (1 января 2004 г.). «Роботизированная локация подземных химических источников». Роботика . 22 (1): 109–115. дои : 10.1017/S026357470300540X . ISSN 1469-8668 . S2CID 40463021 .
- ^ «Расположение химического источника и проект RoboMole» (PDF) .
- ^ «Опрос: локализация источника запаха» (PDF) .
- ^ Маккензи, Дана (6 марта 2023 г.). «Как животные следуют за своим носом» . Знающий журнал . Ежегодные обзоры. doi : 10.1146/knowable-030623-4 . Проверено 13 марта 2023 г.
- ^ Редди, Гаутам; Мурти, Венкатеш Н.; Вергассола, Массимо (10 марта 2022 г.). «Обонятельное зондирование и навигация в турбулентной среде» . Ежегодный обзор физики конденсированного состояния . 13 (1): 191–213. doi : 10.1146/annurev-conmatphys-031720-032754 . ISSN 1947-5454 .
- ^ Луази, Аврора; Элой, Кристоф (июнь 2022 г.). «Поиск источника без градиентов: чем хорош инфотаксис и как его победить» . Труды Королевского общества A: Математические, физические и технические науки . 478 (2262): 20220118.arXiv : 2112.10861 . дои : 10.1098/rspa.2022.0118 . ISSN 1364-5021 .
Внешние ссылки
[ редактировать ]- Электронные носовые технологии от Scensive Technologies Ltd, Великобритания
- Т.С. Пирс, С.С. Шиффман, Х.Т. Нэгл, Дж. В. Гарднер (редакторы), Справочник по машинному обонянию: технология электронного носа, Wiley-VCH, Вайнхайм, 2002. В формате PDF по адресу: [1]
- Архив Сети искусственного обонятельного зондирования (НОС)
- Лундстрем, Ингемар (2000). «Представь запах». Природа . 406 (6797). Спрингер: 682–683. Бибкод : 2000Natur.406..682L . дои : 10.1038/35021156 . ПМИД 10963577 . S2CID 16957778 .