Отклонение (вращение)



Вращение по рысканью — это движение твердого тела вокруг оси отклонения от курса , которое меняет направление, на которое оно указывает, влево или вправо от направления движения. Скорость рыскания или скорость рыскания автомобиля, самолета, снаряда или другого твердого тела - это угловая скорость этого вращения или скорость изменения угла курса, когда самолет находится в горизонтальном положении. Обычно измеряется в градусах в секунду или радианах в секунду.
Еще одним важным понятием является момент рыскания , или момент рыскания, который является компонентом крутящего момента вокруг оси рыскания.
Измерение
[ редактировать ]Скорость рыскания можно измерить путем измерения скорости относительно земли в двух геометрически разделенных точках тела или с помощью гироскопа , или ее можно синтезировать из акселерометров и тому подобного. Это основной показатель того, как водители визуально ощущают поворот автомобиля.

Это важно в транспортных средствах с электронной стабилизацией . Скорость рыскания напрямую связана с боковым ускорением транспортного средства, поворачивающего с постоянной скоростью вокруг постоянного радиуса, соотношением
- тангенциальная скорость*скорость рыскания = поперечное ускорение = тангенциальная скорость^2/радиус поворота, в соответствующих единицах измерения
Соглашение о знаках может быть установлено путем пристального внимания к системам координат.
В более общем маневре , когда радиус и/или скорость варьируются, вышеуказанное соотношение больше не сохраняется.
Контроль скорости рыскания
[ редактировать ]Скорость рыскания можно измерить с помощью акселерометров по вертикальной оси. Любое устройство, предназначенное для измерения скорости рыскания, называется датчиком скорости рыскания .
Дорожные транспортные средства
[ редактировать ]Исследование устойчивости дорожного транспортного средства требует разумного приближения к уравнениям движения.

На схеме изображен четырехколесный автомобиль, у которого передняя ось расположена на расстоянии метра впереди центра тяжести , а задняя ось - на b метров назад от центра тяжести. Кузов автомобиля указывает в направлении (тета), пока он движется в направлении (пси). В общем, это не одно и то же. Шина скользит в зоне контакта по направлению движения, но ступицы совмещены с кузовом автомобиля, а рулевое управление удерживается по центру. Шины деформируются при вращении, чтобы компенсировать это несоосность, и, как следствие, создают боковые силы.


Из исследования курсовой устойчивости , обозначая угловую скорость , уравнения движения:



с масса автомобиля, скорость автомобиля и общий угол автомобиля.



Коэффициент будем называть « демпфированием » по аналогии с демпфером «масса-пружина», который имеет аналогичное уравнение движения. По той же аналогии коэффициент будем называть «жесткостью», так как ее функция состоит в том, чтобы вернуть систему к нулевому прогибу, так же, как пружина.


Вид решения зависит только от знаков членов демпфирования и жесткости. На рисунке представлены четыре возможных типа решения.
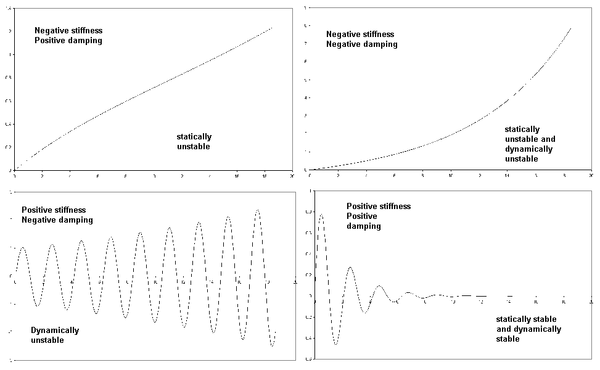
Единственное удовлетворительное решение требует, чтобы и жесткость, и демпфирование были положительными. Если центр тяжести находится впереди центра колесной базы , это всегда будет положительно, и автомобиль будет устойчив на всех скоростях. Однако, если он находится дальше назад, этот член может стать отрицательным выше скорости, определяемой следующим образом:


Выше этой скорости автомобиль будет неустойчивым по направлению (рыскания) . Поправки на относительное влияние передних и задних шин и рулевого усилия доступны в основной статье.
Связь с другими системами ротации
[ редактировать ]Эти вращения являются внутренними вращениями , и их расчет аналогичен формулам Френе-Серре . Выполнение вращения во внутренней системе отсчета эквивалентно умножению справа ее характеристической матрицы (матрицы, которая имеет вектор системы отсчета в виде столбцов) на матрицу вращения.
История
[ редактировать ]Первым самолетом, продемонстрировавшим активное управление по всем трем осям, был планер братьев Райт 1902 года . [1]
См. также
[ редактировать ]- Неблагоприятное отклонение от курса
- Главные оси самолета
- ускорение Кориолиса
- Путевая устойчивость
- Динамика полета
- Шесть степеней свободы
- Динамика автомобиля
- Датчик отклонения от курса
Ссылки
[ редактировать ]- ^ «Ротация самолетов» . Исследовательский центр Гленна . 05 мая 2015 г. Проверено 13 октября 2018 г.