Адаптивный фильтр
Эта статья включает список общих ссылок , но в ней отсутствуют достаточные соответствующие встроенные цитаты . ( февраль 2013 г. ) |
Адаптивный фильтр — это система с линейным фильтром которого , передаточная функция контролируется переменными параметрами, и средства для настройки этих параметров в соответствии с алгоритмом оптимизации . Из-за сложности алгоритмов оптимизации почти все адаптивные фильтры являются цифровыми . Адаптивные фильтры необходимы для некоторых приложений, поскольку некоторые параметры желаемой операции обработки (например, расположение отражающих поверхностей в реверберирующем пространстве) заранее не известны или изменяются. Адаптивный фильтр с замкнутым контуром использует обратную связь в виде сигнала ошибки для уточнения своей передаточной функции.
Вообще говоря, адаптивный процесс с замкнутым контуром включает использование функции стоимости , которая является критерием оптимальной производительности фильтра, для подачи алгоритма, который определяет, как изменить передаточную функцию фильтра, чтобы минимизировать затраты на следующей итерации. Наиболее распространенной функцией стоимости является средний квадрат сигнала ошибки.
По мере увеличения мощности процессоров цифровых сигналов адаптивные фильтры стали гораздо более распространенными и теперь регулярно используются в таких устройствах, как мобильные телефоны и другие устройства связи, видеокамеры и цифровые камеры, а также оборудование для медицинского мониторинга.
Пример приложения
[ редактировать ]Запись сердечного ритма (ЭКГ ) может быть искажена помехами от сети переменного тока . Точная частота мощности и ее гармоники могут меняться от момента к моменту.
Одним из способов устранения шума является фильтрация сигнала режекторным фильтром на частоте сети и вблизи нее, но это может привести к чрезмерному ухудшению качества ЭКГ, поскольку частота сердечных сокращений также, скорее всего, будет иметь частотные компоненты в отклоненном диапазоне.
Чтобы избежать этой потенциальной потери информации, можно использовать адаптивный фильтр. Адаптивный фильтр будет принимать входные данные как от пациента, так и от сети и, таким образом, сможет отслеживать фактическую частоту шума по мере его колебаний и вычитать шум из записи. Такой адаптивный метод обычно позволяет использовать фильтр с меньшим диапазоном подавления, а это означает, что в данном случае качество выходного сигнала является более точным для медицинских целей. [1] [2]
Блок-схема
[ редактировать ]Идея адаптивного фильтра с замкнутым контуром заключается в том, что переменный фильтр настраивается до тех пор, пока ошибка (разница между выходным сигналом фильтра и желаемым сигналом) не будет минимизирована. Фильтр наименьших средних квадратов (LMS) и фильтр рекурсивных наименьших квадратов (RLS) являются типами адаптивного фильтра.
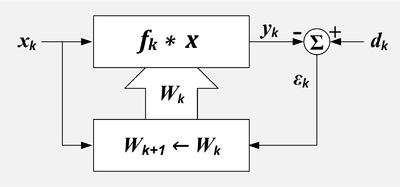
Адаптивный фильтр. k = номер выборки, x = эталонный вход, X = набор последних значений x, d = желаемый вход, W = набор коэффициентов фильтра, ε = выход ошибки, f = импульсная характеристика фильтра, * = свертка, Σ = суммирование, верхнее поле = линейный фильтр, нижнее поле = алгоритм адаптации


Адаптивный фильтр имеет два входных сигнала: и которые иногда называют основным входом и опорным входом соответственно. [3] Алгоритм адаптации пытается отфильтровать опорный входной сигнал в копию желаемого входного сигнала путем минимизации остаточного сигнала. . Если адаптация прошла успешно, на выходе фильтра фактически является оценкой полезного сигнала.




- который включает в себя полезный сигнал плюс нежелательные помехи и
- который включает в себя сигналы, которые коррелируют с некоторыми нежелательными помехами в .
- k представляет номер дискретной выборки.
Фильтр управляется набором коэффициентов или весов L+1.
- представляет набор или вектор весов, которые управляют фильтром в момент расчета k.
- где относится к '-й вес в k-й раз.
- представляет собой изменение весов, которое происходит в результате корректировок, вычисленных в момент расчета k.
- Эти изменения будут применены после момента выборки k и до того, как они будут использованы в момент выборки k+1.
![{\displaystyle \mathbf {W} _{k}=\left[w_{0k},\,w_{1k},\,...,\,w_{Lk}\right]^{T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/927bf9a780012f1a80bb6608a3ff410221a7b43e)



Выход обычно но это может быть или это могут быть даже коэффициенты фильтра. [4] (Видроу)
Входные сигналы определяются следующим образом:

- где:
- g = полезный сигнал,
- g ' = сигнал, который коррелирует с желаемым сигналом g ,
- u = нежелательный сигнал, который добавляется к g , но не коррелирует с g или g '
- u ' = сигнал, который коррелирует с нежелательным сигналом u , но не коррелирует с g или g ' ,
- v = нежелательный сигнал (обычно случайный шум), не коррелирующий с g , g ' , u , u ' или v ' ,
- v ' = нежелательный сигнал (обычно случайный шум), не коррелирующий с g , g ' , u , u ' или v .

Выходные сигналы определяются следующим образом:
- .
- где:
- = выход фильтра, если на входе было только g ' ,
- = выход фильтра, если на входе было только u ' ,
- = выход фильтра, если на входе было только v ' .





КИХ-фильтр линии задержки с отводом
[ редактировать ]Если переменный фильтр имеет структуру конечной импульсной характеристики (FIR) линии задержки с отводом , то импульсная характеристика равна коэффициентам фильтра. Выход фильтра определяется выражением
- где относится к '-й вес в k-й раз.

Идеальный случай
[ редактировать ]В идеальном случае . Все нежелательные сигналы в представлены . полностью состоит из сигнала, коррелирующего с нежелательным сигналом в .



Выход переменного фильтра в идеальном случае равен
- .

Сигнал ошибки или функция стоимости – это разница между и
- . Полезный сигнал g k проходит без изменения.

Сигнал ошибки минимизируется в среднеквадратическом смысле, когда сведен к минимуму. Другими словами, это лучшая среднеквадратическая оценка . В идеальном случае и , и все, что остается после вычитания, который представляет собой неизмененный полезный сигнал с удаленными всеми нежелательными сигналами.
![{\displaystyle [u_{k}-{\hat {u}}_{k}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cbc75695df122bd9dc20a1832864efec904c1446)




Компоненты сигнала на опорном входе
[ редактировать ]В некоторых ситуациях опорный вход включает в себя компоненты полезного сигнала. Это означает, что g' ≠ 0.
Полное подавление нежелательных помех в этом случае невозможно, но возможно улучшение соотношения сигнал/помеха. Результат будет
- . Полезный сигнал будет изменен (обычно уменьшен).

Отношение выходного сигнала к помехе имеет простую формулу, называемую инверсией мощности .
- .
- где
- = отношение выходного сигнала к помехе.
- = отношение опорного сигнала к помехе.
- = частота в z-домене.
- где




Эта формула означает, что отношение выходного сигнала к помехе на определенной частоте является обратной величиной отношения опорного сигнала к помехе. [5]
Пример: в ресторане быстрого питания есть окно для подъезда к дому. Прежде чем подойти к окну, покупатели оформляют заказ, говоря в микрофон. Микрофон также улавливает шум двигателя и окружающей среды. Этот микрофон обеспечивает основной сигнал. Мощность сигнала голоса клиента и мощность шума двигателя равны. Сотрудникам ресторана сложно понять клиента. Чтобы уменьшить количество помех в основном микрофоне, второй микрофон расположен там, где он предназначен для улавливания звуков двигателя. Он также улавливает голос клиента. Этот микрофон является источником опорного сигнала. В этом случае шум двигателя в 50 раз сильнее голоса клиента. После того как подавитель сойдется, отношение первичного сигнала к помехе улучшится с 1:1 до 50:1.
Адаптивный линейный сумматор
[ редактировать ]
Адаптивный линейный сумматор, показывающий объединитель и процесс адаптации. k = номер выборки, n = индекс входной переменной, x = эталонные входы, d = желаемый вход, W = набор коэффициентов фильтра, ε = выход ошибки, Σ = суммирование, верхний блок = линейный сумматор, нижний блок = алгоритм адаптации. 
Адаптивный линейный сумматор, компактное представление. k = номер выборки, n = индекс входной переменной, x = эталонные входы, d = желаемый вход, ε = выход ошибки, Σ = суммирование.


Адаптивный линейный сумматор (ALC) напоминает КИХ-фильтр с адаптивной линией задержки с отводом, за исключением того, что между значениями X нет предполагаемой взаимосвязи. Если бы значения X были получены с выходов отводной линии задержки, то комбинация отводной линии задержки и ALC представляла бы собой адаптивный фильтр. Однако значения X могут быть значениями массива пикселей. Или они могут быть выходами нескольких линий задержки. ALC находит применение в качестве адаптивного формирователя луча для массивов гидрофонов или антенн.
- где относится к '-й вес в k-й раз.

Алгоритм LMS
[ редактировать ]Если переменный фильтр имеет КИХ-структуру с ответвленной линией задержки, то алгоритм обновления LMS особенно прост. Обычно после каждой выборки коэффициенты КИХ-фильтра корректируются следующим образом: [6]
- для

- µ называется коэффициентом сходимости .

Алгоритм LMS не требует, чтобы значения X имели какую-либо конкретную взаимосвязь; поэтому его можно использовать для адаптации линейного сумматора, а также КИХ-фильтра. В этом случае формула обновления записывается как:

Эффект алгоритма LMS состоит в том, чтобы в каждый момент времени k вносить небольшое изменение в каждый вес. Направление изменения таково, что оно уменьшило бы ошибку, если бы оно было применено в момент k. Величина изменения каждого веса зависит от μ, соответствующего значения X и ошибки во время k. Веса, вносящие наибольший вклад в результат, , изменяются больше всего. Если ошибка равна нулю, то весов не должно быть никаких изменений. Если соответствующее значение X равно нулю, то изменение веса не имеет значения, поэтому оно не изменяется.
Конвергенция
[ редактировать ]μ контролирует, насколько быстро и насколько хорошо алгоритм сходится к оптимальным коэффициентам фильтра. Если µ слишком велико, алгоритм не сходится. Если µ слишком мало, алгоритм сходится медленно и может быть не в состоянии отслеживать изменяющиеся условия. Если µ велико, но не слишком велико, чтобы предотвратить сходимость, алгоритм быстро достигает устойчивого состояния, но постоянно выходит за пределы оптимального весового вектора. Иногда значение μ сначала делают большим для быстрой сходимости, а затем уменьшают, чтобы минимизировать перерегулирование.
В 1985 году Уидроу и Стернс заявили, что им не известны доказательства сходимости алгоритма LMS во всех случаях. [7]
Однако при определенных предположениях о стационарности и независимости можно показать, что алгоритм сходится, если

- где
- = сумма всей входной мощности
- где

- среднеквадратичное значение 'й вход

В случае линейного фильтра задержки с отводом каждый вход имеет одно и то же среднеквадратичное значение, поскольку они просто имеют одинаковые значения задержки. В этом случае полная мощность равна

- где
- среднеквадратичное значение , входной поток. [7]
- где

Это приводит к нормализованному алгоритму LMS:
- в этом случае критериями сходимости становятся: .


Нелинейные адаптивные фильтры
[ редактировать ]Цель нелинейных фильтров — преодолеть ограничения линейных моделей. Существует несколько часто используемых подходов: Volterra LMS, адаптивный фильтр ядра , адаптивный сплайновый фильтр. [8] и адаптивный фильтр Урысона. [9] [10] Многие авторы [11] включите в этот список также нейронные сети. Общая идея Volterra LMS и Kernel LMS заключается в замене выборок данных различными нелинейными алгебраическими выражениями. Для Volterra LMS это выражение представляет собой серию Volterra . В Spline Adaptive Filter модель представляет собой каскад линейного динамического блока и статической нелинейности, аппроксимируемой сплайнами.В адаптивном фильтре Урысона линейные члены модели

заменяются кусочно-линейными функциями

которые идентифицируются из выборок данных.
Применение адаптивных фильтров
[ редактировать ]- Адаптивное шумоподавление
- Акустический шумоконтроль
- Прогнозирование сигнала
- Адаптивная отмена обратной связи
- Эхоподавление
Фильтрация реализаций
[ редактировать ]- Фильтр наименьших средних квадратов
- Рекурсивный фильтр наименьших квадратов
- Адаптивный фильтр частотной области блока с несколькими задержками
См. также
[ редактировать ]- 2D-адаптивные фильтры
- Фильтр (обработка сигнала)
- Фильтр Калмана
- Адаптивный фильтр ядра
- Линейное предсказание
- Оценщик MMSE
- Венский фильтр
- Уравнение Винера – Хопфа
Ссылки
[ редактировать ]- ^ Такор, Невада; Чжу, И-Шэн (1 августа 1991 г.). «Применение адаптивной фильтрации для анализа ЭКГ: шумоподавление и обнаружение аритмии». Транзакции IEEE по биомедицинской инженерии . 38 (8): 785–794. дои : 10.1109/10.83591 . ISSN 0018-9294 . ПМИД 1937512 . S2CID 11271450 .
- ^ Уидроу, Бернард; Стернс, Сэмюэл Д. (1985). Адаптивная обработка сигналов (1-е изд.). Прентис-Холл. п. 329 . ISBN 978-0130040299 .
- ^ Уидроу стр. 304
- ^ Уидроу, стр. 212.
- ^ Уидроу стр. 313
- ^ Уидроу с. 100
- ^ Перейти обратно: а б Уидроу стр. 103
- ^ Данило Комминиелло; Хосе К. Принсипи (2018). Адаптивные методы обучения для моделирования нелинейных систем . Elsevier Inc. ISBN 978-0-12-812976-0 .
- ^ М.Полуэктов и А.Полярный. Адаптивный фильтр Урысона . 2019.
- ^ «Нелинейная адаптивная фильтрация» . ezcodesample.com .
- ^ Вэйфэн Лю; Джозеф К. Принс; Саймон Хайкин (март 2010 г.). Адаптивная фильтрация ядра: подробное введение (PDF) . Уайли. стр. 100-1 12–20. ISBN 978-0-470-44753-6 .
Источники
[ редактировать ]- Хейс, Монсон Х. (1996). Статистическая цифровая обработка сигналов и моделирование . Уайли. ISBN 978-0-471-59431-4 .
- Хайкин, Саймон (2002). Адаптивная теория фильтров . Прентис Холл. ISBN 978-0-13-048434-5 .
- Уидроу, Бернард; Стернс, Сэмюэл Д. (1985). Адаптивная обработка сигналов . Энглвуд Клиффс, Нью-Джерси: Прентис Холл. ISBN 978-0-13-004029-9 .