Венский фильтр
этой статьи Начальный раздел может быть слишком коротким, чтобы адекватно суммировать ключевые моменты . ( октябрь 2023 г. ) |
При обработке сигналов фильтр Винера — это фильтр, используемый для получения оценки желаемого или целевого случайного процесса посредством линейной нестационарной ( LTI ) фильтрации наблюдаемого шумного процесса, предполагая известные стационарные спектры сигнала и шума, а также аддитивный шум. Фильтр Винера минимизирует среднеквадратическую ошибку между оцененным случайным процессом и желаемым процессом.
Описание [ править ]
Целью фильтра Винера является вычисление статистической оценки неизвестного сигнала с использованием связанного сигнала в качестве входного сигнала и фильтрация этого известного сигнала для получения оценки в качестве выходного сигнала. Например, известный сигнал может состоять из интересующего неизвестного сигнала, искаженного аддитивным шумом . Фильтр Винера можно использовать для фильтрации шума из искаженного сигнала, чтобы получить оценку основного интересующего сигнала. Фильтр Винера основан на статистическом подходе, и более статистическое описание теории приведено в статье об оценке минимальной среднеквадратической ошибки (MMSE) .
Типичные детерминированные фильтры рассчитаны на желаемую частотную характеристику . Однако в конструкции фильтра Винера используется другой подход. Предполагается, что человек знает спектральные свойства исходного сигнала и шума, и ищет линейный, не зависящий от времени фильтр, выходной сигнал которого будет максимально приближен к исходному сигналу. Фильтры Винера характеризуются следующим: [1]
- Предположение: сигнал и (аддитивный) шум представляют собой стационарные линейные случайные процессы с известными спектральными характеристиками или известной автокорреляцией и взаимной корреляцией.
- Требование: фильтр должен быть физически реализуемым/ каузальным (это требование можно отбросить, что приведет к некаузальному решению)
- Критерий эффективности: минимальная среднеквадратическая ошибка (MMSE).
Этот фильтр часто используется в процессе деконволюции ; для этого приложения см. Винеровскую деконволюцию .
Решения для фильтров Винера [ править ]
Позволять быть неизвестным сигналом, который необходимо оценить на основе измерительного сигнала . Где альфа — настраиваемый параметр. известно как предсказание, называется фильтрацией, и известно как сглаживание (см. главу «Фильтрация Винера» в [1] для более подробной информации).





Проблема фильтра Винера имеет решения для трех возможных случаев: один, когда непричинный фильтр приемлем (требуется бесконечное количество как прошлых, так и будущих данных), случай, когда причинный желателен фильтр (использующий бесконечное количество прошлых данных) и случай с конечной импульсной характеристикой (FIR), когда используются только входные данные (т. е. результат или выход не возвращаются обратно в фильтр, как в случае IIR). Первый случай легко решить, но он не подходит для приложений реального времени. Главным достижением Винера было решение случая, когда действует требование причинности; Норман Левинсон представил решение FIR в приложении к книге Винера.
решение Непричинное

где являются спектральными плотностями . При условии, что является оптимальным, то уравнение минимальной среднеквадратической ошибки сводится к



и решение — обратное двустороннее Лапласа преобразование .

решение Причинное

где
- состоит из причинной части (то есть та часть этой дроби, имеющая решение с положительным временем при обратном преобразовании Лапласа)
- является причинным компонентом (т.е. обратное преобразование Лапласа не равно нулю только для )
- является антипричинным компонентом (т.е. обратное преобразование Лапласа не равно нулю только для )







Эта общая формула сложна и заслуживает более подробного пояснения. Чтобы записать решение в конкретном случае следует выполнить следующие действия: [2]
- Начнем со спектра в рациональной форме и разложить его на причинные и антикаузальные компоненты: где содержит все нули и полюса в левой полуплоскости (LHP) и содержит нули и полюса в правой полуплоскости (RHP). Это называется факторизацией Винера-Хопфа .
- Разделять к и запишите результат в виде разложения в неполные дроби .
- Выберите в этом разложении только те члены, которые имеют полюсы в ПЛТ. Назовите эти условия .
- Разделять к . Результатом является искомая передаточная функция фильтра. .




Фильтр Винера с конечной импульсной характеристикой серий для дискретных
Причинно-следственный фильтр Винера с конечной импульсной характеристикой (FIR) вместо использования некоторой заданной матрицы данных X и выходного вектора Y находит оптимальные веса отводов, используя статистику входных и выходных сигналов. Он заполняет входную матрицу X оценками автокорреляции входного сигнала (T) и заполняет выходной вектор Y оценками взаимной корреляции между выходным и входным сигналами (V).
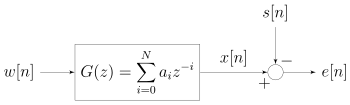
Чтобы получить коэффициенты фильтра Винера, рассмотрим сигнал w [ n ], подаваемый на фильтр Винера порядка (количества прошлых отводов) N и с коэффициентами . Выход фильтра обозначается x [ n ] и определяется выражением

![{\displaystyle x[n]=\sum _{i=0}^{N}a_{i}w[ni].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b52e807887e91ea452fcc1d5c0b8037593336d05)
Остаточная ошибка обозначается e [ n ] и определяется как e [ n ] = x [ n ] − s [ n ] (см. соответствующую блок-схему). Фильтр Винера спроектирован таким образом, чтобы минимизировать среднеквадратическую ошибку ( критерий MMSE ), которую кратко можно сформулировать следующим образом:
![{\displaystyle a_{i}=\arg \min E\left[e^{2}[n]\right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c1479360ebceaf703b055388dcd8a3f1d251ca6)
где обозначает оператор ожидания. В общем случае коэффициенты может быть комплексным и может быть получено для случая, когда w [ n ] и s [ n ] также являются комплексными. При комплексном сигнале решаемая матрица представляет собой эрмитову матрицу Теплица , а не симметричную матрицу Теплица . Для простоты ниже рассматривается только случай, когда все эти величины действительны. Среднеквадратическую ошибку (MSE) можно переписать как:
![{\displaystyle E[\cdot ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/57d488a22bc9f41e976d3afb6036190bcbb36b2e)

![{\displaystyle {\begin{aligned}E\left[e^{2}[n]\right]&=E\left[(x[n]-s[n])^{2}\right]\\ &=E\left[x^{2}[n]\right]+E\left[s^{2}[n]\right]-2E[x[n]s[n]]\\&=E \left[\left(\sum _{i=0}^{N}a_{i}w[ni]\right)^{2}\right]+E\left[s^{2}[n]\ right]-2E\left[\sum _{i=0}^{N}a_{i}w[ni]s[n]\right]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/93fade3732a89c3c06d14e7532d4e5ac8e8ba5e0)
Чтобы найти вектор что минимизирует приведенное выше выражение, вычислите его производную по каждому
![{\displaystyle [a_{0},\,\ldots,\,a_{N}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/23b15c3b4639ed827b254c60c133606cec814d33)
![{\displaystyle {\begin{aligned}{\frac {\partial }{\partial a_{i}}}E\left[e^{2}[n]\right]&={\frac {\partial } \partial a_{i}}}\left\{E\left[\left(\sum _{j=0}^{N}a_{j}w[nj]\right)^{2}\right]+ E\left[s^{2}[n]\right]-2E\left[\sum _{j=0}^{N}a_{j}w[nj]s[n]\right]\right\ }\\&=2E\left[\left(\sum _{j=0}^{N}a_{j}w[nj]\right)w[ni]\right]-2E[w[ni]s [n]]\\&=2\left(\sum _{j=0}^{N}E[w[nj]w[ni]]a_{j}\right)-2E[w[ni]s [n]]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/32d0c093c419d914a8d0b81eb7b53aec3d2e77bf)
Предполагая, что w [ n ] и s [ n ] стационарны и совместно стационарны, последовательности и известная соответственно как автокорреляция w [ n ] и взаимная корреляция между w [ n ] и s [ n ] могут быть определены следующим образом:
![{\displaystyle R_{w}[м]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6fd433a0ac1fe24b6b95d7bad92cea453be5c7f2)
![{\displaystyle R_{ws}[м]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7e7790e74796ce594e25ef54c65a4af6ea895803)
![{\displaystyle {\begin{aligned}R_{w}[m]&=E\{w[n]w[n+m]\}\\R_{ws}[m]&=E\{w[n ]s[n+m]\}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/013fa6d6fbd4e75c4c4ffefdc98dde2ba69d0aeb)
Таким образом, производную MSE можно переписать как:
![{\displaystyle {\frac {\partial }{\partial a_{i}}}E\left[e^{2}[n]\right]=2\left(\sum _{j=0}^{N }R_{w}[ji]a_{j}\right)-2R_{ws}[i]\qquad i=0,\cdots ,N.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0b838dec6ea00072ce0d8b4ec7e69c4c24768811)
Обратите внимание, что на самом деле , автокорреляция симметрична:
![{\displaystyle w[n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2a4e3e5afc2a8c6da9020b8c6b21450959101a18)
![{\displaystyle R_{w}[ji]=R_{w}[ij]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0a7c44b249eb0d5faa8fd08516814ecedbebc451)
![{\displaystyle \sum _{j=0}^{N}R_{w}[ji]a_{j}=R_{ws}[i]\qquad i=0,\cdots,N.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2a9984c26d8ebeb301f22cbeeaa797ee44ef7632)
который можно переписать (используя указанное выше свойство симметричности) в матричной форме
![{\displaystyle \underbrace {\begin{bmatrix}R_{w}[0]&R_{w}[1]&\cdots &R_{w}[N]\\R_{w}[1]&R_{w}[0 ]&\cdots &R_{w}[N-1]\\\vdots &\vdots &\ddots &\vdots \\R_{w}[N]&R_{w}[N-1]&\cdots &R_{w }[0]\end{bmatrix}} _{\mathbf {T} }\underbrace {\begin{bmatrix}a_{0}\\a_{1}\\\vdots \\a_{N}\end{bmatrix }} _{\mathbf {a} }=\underbrace {\begin{bmatrix}R_{ws}[0]\\R_{ws}[1]\\\vdots \\R_{ws}[N]\end {bmatrix}} _ {\mathbf {v} }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/22ca4ea294dd47b8d634cb78e5be93073547626f)
Эти уравнения известны как уравнения Винера – Хопфа . Матрица T, фигурирующая в уравнении, является симметричной матрицей Теплица . В подходящих условиях на , эти матрицы, как известно, положительно определены и, следовательно, невырождены, что дает уникальное решение для определения вектора коэффициентов фильтра Винера, . Более того, существует эффективный алгоритм решения таких уравнений Винера-Хопфа, известный как алгоритм Левинсона-Дурбина, поэтому явное обращение T не требуется.


В некоторых статьях функция взаимной корреляции определяется противоположным образом:
![{\displaystyle R_{sw}[m]=E\{w[n]s[n+m]\}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/674ae192cf58157ffa143e5a78c60150f9e0ec96)

![{\displaystyle R_{sw}[0]\ldots R_{sw}[N]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c74f1a47c80f31bc0f228f14d5efc080ecfb440e)
Какие бы обозначения ни использовались, обратите внимание, что на самом деле :
![{\displaystyle w[n],s[n]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/47e41c9959e941c5694db0af5c0634c4537c574c)
![{\displaystyle R_{sw}[k]=R_{ws}[-k]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/185aafdce950ee0f36925021ae3c93f5c5023d5b)
Связь с фильтром наименьших квадратов [ править ]
Реализация причинного фильтра Винера во многом похожа на решение оценки методом наименьших квадратов , за исключением области обработки сигналов. Решение методом наименьших квадратов для входной матрицы и выходной вектор является



КИХ-фильтр Винера связан с фильтром наименьших средних квадратов , но минимизация критерия ошибки последнего не зависит от взаимной корреляции или автокорреляции. Его решение сходится к решению фильтра Винера.
Комплексные сигналы [ править ]
Для сложных сигналов вывод комплексного фильтра Винера выполняется путем минимизации = . Это включает в себя вычисление частных производных как по действительной, так и по мнимой части. и требуя, чтобы они оба были равны нулю.
![{\displaystyle E\left[|e[n]|^{2}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ff9d46fcdf6b205655f7182df44cc92ec004ce5d)
![{\displaystyle E\left[e[n]e^{*}[n]\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/660e20966e374f35618b457d09451af5d0b1d7b1)
Итоговые уравнения Винера-Хопфа:
![{\displaystyle \sum _{j=0}^{N}R_{w}[ji]a_{j}^{*}=R_{ws}[i]\qquad i=0,\cdots,N.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5a382076f2533f0688f1875d8f3a133be3d531f1)
которое можно переписать в матричной форме:
![{\displaystyle \underbrace {\begin{bmatrix}R_{w}[0]&R_{w}^{*}[1]&\cdots &R_{w}^{*}[N-1]&R_{w}^ {*}[N]\\R_{w}[1]&R_{w}[0]&\cdots &R_{w}^{*}[N-2]&R_{w}^{*}[N-1 ]\\\vdots &\vdots &\ddots &\vdots &\vdots \\R_{w}[N-1]&R_{w}[N-2]&\cdots &R_{w}[0]&R_{w }^{*}[1]\\R_{w}[N]&R_{w}[N-1]&\cdots &R_{w}[1]&R_{w}[0]\end{bmatrix}} _ {\mathbf {T} }\underbrace {\begin{bmatrix}a_{0}^{*}\\a_{1}^{*}\\\vdots \\a_{N-1}^{*}\ \a_{N}^{*}\end{bmatrix}} _{\mathbf {a^{*}} }=\underbrace {\begin{bmatrix}R_{ws}[0]\\R_{ws}[ 1]\\\vdots \\R_{ws}[N-1]\\R_{ws}[N]\end{bmatrix}} _{\mathbf {v} }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5189a3cd5eb8558934169b1ed63016fa0f5b14a7)
Обратите внимание, что:
![{\displaystyle {\begin{aligned}R_{w}[-k]&=R_{w}^{*}[k]\\R_{sw}[k]&=R_{ws}^{*}[ -k]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b747272d7edd8e56a4fa0ae17bc829245cefd5c2)
Вектор коэффициентов Винера затем вычисляется как:

Приложения [ править ]
Фильтр Винера имеет множество применений в обработке сигналов, обработке изображений, [3] системы управления и цифровая связь. Эти приложения обычно попадают в одну из четырех основных категорий:


Например, фильтр Винера можно использовать при обработке изображений для удаления шума из изображения. Например, используя функцию Mathematica: WienerFilter[image,2] на первом изображении справа, создается отфильтрованное изображение под ним.
Он обычно используется для шумоподавления аудиосигналов, особенно речи, в качестве препроцессора перед распознаванием речи .
История [ править ]
Фильтр был предложен Норбертом Винером в 1940-х годах и опубликован в 1949 году. [4] [5] Эквивалент работы Винера в дискретном времени был независимо получен Андреем Колмогоровым и опубликован в 1941 году. [6] Поэтому теорию часто называют теорией фильтрации Винера-Колмогорова ( см. Кригинг ). Фильтр Винера был первым предложенным статистическим фильтром, который впоследствии породил множество других, включая фильтр Калмана .
См. также [ править ]
Ссылки [ править ]
- ↑ Перейти обратно: Перейти обратно: а б Браун, Роберт Гровер; Хван, Патрик Ю.К. (1996). Введение в случайные сигналы и прикладную фильтрацию Калмана (3-е изд.). Нью-Йорк: Джон Уайли и сыновья. ISBN 978-0-471-12839-7 .
- ^ Уэлч, Ллойд Р. «Теория Винера – Хопфа» (PDF) . Архивировано из оригинала (PDF) 20 сентября 2006 г. Проверено 25 ноября 2006 г.
- ^ Бульфельфель, Д.; Рангаян, РМ; Хан, LJ; Клойбер, Р. (1994). «Трехмерная реставрация изображений однофотонной эмиссионной компьютерной томографии». Транзакции IEEE по ядерной науке . 41 (5): 1746–1754. Бибкод : 1994ИТНС...41.1746Б . дои : 10.1109/23.317385 . S2CID 33708058 .
- ^ Винер Н.: Интерполяция, экстраполяция и сглаживание стационарных временных рядов», Отчет Службы 19, Исследовательский проект DIC-6037 MIT, февраль 1942 г.
- ^ Винер, Норберт (1949). Экстраполяция, интерполяция и сглаживание стационарных временных рядов . Нью-Йорк: Уайли. ISBN 978-0-262-73005-1 .
- ^ Колмогоров А.Н.: «Стационарные последовательности в гильбертовом пространстве», (на русском языке) Bull. Московский ун-т. 1941 т.2 №6 1-40. Английский перевод в Кайлат Т. (ред.) Линейная оценка методом наименьших квадратов Дауден, Хатчинсон и Росс, 1977 г. ISBN 0-87933-098-8
Дальнейшее чтение [ править ]
- Томас Кайлат , Али Х. Сайед и Бабак Хассиби , Линейная оценка, Прентис-Холл, Нью-Джерси, 2000 г., ISBN 978-0-13-022464-4 .
Внешние ссылки [ править ]
- Mathematica WienerFilter Функция