Чистая сила

В механике чистая сила — это сумма всех сил, действующих на объект. Например, если на объект действуют две силы в противоположных направлениях, и одна сила больше другой, эти силы можно заменить одной силой, которая представляет собой разность большей и меньшей силы. Эта сила является чистой силой. [1]
Когда на объект действуют силы, они изменяют его ускорение . Чистая сила — это совокупное воздействие всех сил на ускорение объекта, как это описано вторым законом движения Ньютона .
Когда чистая сила прикладывается в определенной точке объекта, соответствующий крутящий момент можно рассчитать . Сумма чистой силы и крутящего момента называется равнодействующей силой , которая заставляет объект вращаться так же, как все действующие на него силы, если бы они были приложены по отдельности. [2]
Вполне возможно, что все силы, действующие на объект, вообще не создают крутящего момента. Это происходит, когда результирующая сила прикладывается вдоль линии действия .
В некоторых текстах термины результирующая сила и чистая сила используются так, как будто они означают одно и то же. Это не всегда так, особенно в сложных темах, таких как движение вращающихся объектов или в ситуациях, когда все идеально сбалансировано, известных как статическое равновесие . В этих случаях важно понимать, что «чистая сила» и «результирующая сила» могут иметь разные значения.
Концепция [ править ]
В физике сила считается векторной величиной. Это означает, что оно имеет не только размер (или величину), но и направление, в котором оно действует. Обычно мы обозначаем силу символом F, выделенным жирным шрифтом, или иногда мы помещаем стрелку над символом, чтобы указать его векторную природу, например: .

Когда нам нужно визуально представить силу, мы рисуем отрезок линии. Этот отрезок начинается в точке А приложена сила, и заканчивается в другой точке В. , где Эта линия не только показывает нам направление силы (от А до В ), но и ее величину: чем длиннее линия, тем сильнее сила.
Одна из важнейших концепций физики заключается в том, что силы можно складывать, что является основой сложения векторов. Эта концепция была центральной в физике со времен Галилея и Ньютона, образуя краеугольный камень векторного исчисления , которое появилось в конце 1800-х и начале 1900-х годов. [3]
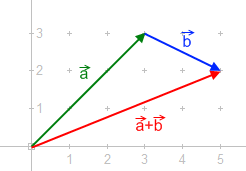


На рисунке справа показано, как сложить две силы методом «от кончика к хвосту». Этот метод предполагает привлечение сил , и с кончика первой силы. Результирующая сила, или «общая» сила, , затем рисуется от начала первой силы (хвост) до конца второй силы (кончик). Понимание этой концепции имеет основополагающее значение для понимания того, как силы взаимодействуют и объединяются, влияя на движение и равновесие объектов.


Когда силы применяются к протяженному телу (телу, которое не является единственной точкой), они могут быть приложены в разных точках. Такие силы называются «связанными векторами». Важно помнить, что для сложения этих сил их необходимо рассматривать в одной и той же точке.
Понятие «чистой силы» вступает в игру, когда вы смотрите на общее воздействие всех этих сил на тело. Однако чистая сила сама по себе не обязательно может сохранить движение тела. Это связано с тем, что, помимо чистой силы, также имеет значение «крутящий момент» или эффект вращения, связанный с этими силами. Чистая сила должна быть приложена в нужной точке и с правильным крутящим моментом, чтобы воспроизвести эффект исходных сил.
Когда чистая сила и соответствующий крутящий момент прикладываются в одной точке, они вместе образуют так называемую результирующую силу . Эта результирующая комбинация силы и момента будет иметь такое же воздействие на тело, как и все первоначальные силы и связанные с ними крутящие моменты.
Правило параллелограмма для сложения сил [ править ]
Сила известна как связанный вектор, что означает, что она имеет направление, величину и точку приложения. Удобный способ определить силу — провести отрезок линии от точки до точки B. A Если мы обозначим координаты этих точек как A = (A x , A y , A z ) и B = (B x , B y , B z ), то вектор силы, приложенный к точке A, будет равен

Длина вектора определяет величину и дается



Сумма двух сил F 1 и F 2, приложенных к точке А, может быть вычислена из суммы определяющих их сегментов. Пусть F 1 = B − A и F 2 = D − A , тогда сумма этих двух векторов равна

который можно записать как

где E — середина отрезка BD соединяющего точки B и D. ,
Таким образом, сумма сил F 1 и F 2 равна удвоенному отрезку, соединяющему A с средней точкой E отрезка, соединяющего конечные точки B и D двух сил. Удвоение этой длины легко достигается путем определения отрезков BC и DC , параллельных AD и AB соответственно, для завершения параллелограмма ABCD . Диагональ AC этого параллелограмма представляет собой сумму двух векторов сил. Это известно как правило сложения сил параллелограмма.
Перевод и вращение под действием силы [ править ]
Точечные силы [ править ]
Когда на частицу действует сила, она прикладывается к одной точке (объем частицы пренебрежимо мал): это точечная сила, а частица — точка ее приложения. Но внешняя сила на протяженное тело (предмет) может быть приложена к ряду составляющих его частиц, т. е. может быть «распространена» по некоторому объему или поверхности тела. Однако для определения его вращательного воздействия на тело необходимо указать точку его приложения (фактически, линию приложения, как поясняется ниже). Обычно проблему решают следующими способами:
- Часто объем или поверхность, на которую действует сила, относительно мала по сравнению с размером тела, так что ее можно аппроксимировать точкой. Обычно нетрудно определить, является ли ошибка, вызванная такой аппроксимацией, допустимой.
- Если это неприемлемо (очевидно, например, в случае гравитационной силы), такую «объемно-поверхностную» силу следует описать как систему сил (компонент), каждая из которых действует на одну частицу, а затем следует выполнить расчет для каждый из них отдельно. Такой расчет обычно упрощается за счет использования дифференциальных элементов объема/поверхности тела и интегрального исчисления. Однако в ряде случаев можно показать, что такую систему сил можно заменить одноточечной силой без фактического расчета (как в случае с однородной гравитационной силой).
В любом случае анализ движения твердого тела начинается с модели точечных сил. А когда сила, действующая на тело, изображается графически, ориентированный отрезок линии, изображающий силу, обычно рисуется так, чтобы «начинаться» (или «кончаться») в точке приложения.
Твердые тела [ править ]

В примере, показанном на диаграмме напротив, одна сила действует в точке приложения H на свободное твердое тело. Тело имеет массу его центр масс — точка С. а В приближении постоянной массы сила вызывает изменения в движении тела, описываемые следующими выражениями:

- – центр масс ускорения; и

- – угловое ускорение тела.

Во втором выражении - крутящий момент или момент силы, тогда как – момент инерции тела. Крутящий момент, вызванный силой – векторная величина, определенная относительно некоторой точки отсчета:


- вектор крутящего момента, а

- это величина крутящего момента.

Вектор — вектор положения точки приложения силы, и в этом примере он нарисован из центра масс в качестве опорной точки (см. Диаграмму). Отрезок прямой является рычагом силы относительно центра масс. Как видно из иллюстрации, крутящий момент не меняется (то же плечо рычага), если точку приложения перемещать по линии приложения силы (черный пунктир). Более формально это следует из свойств векторного произведения и показывает, что вращательное действие силы зависит только от положения линии ее приложения, а не от конкретного выбора точки приложения вдоль этой линии.


Вектор крутящего момента перпендикулярен плоскости, определяемой силой и вектором , и в этом примере оно направлено на наблюдателя; вектор углового ускорения имеет то же направление. Правило правой руки связывает это направление с вращением по часовой стрелке или против часовой стрелки в плоскости чертежа.
Момент инерции рассчитывается относительно оси, проходящей через центр масс, параллельной крутящему моменту. Если тело, изображенное на рисунке, представляет собой однородный диск, то этот момент инерции равен . Если диск имеет массу 0,5 кг и радиус 0,8 м, момент инерции равен 0,16 кгм. 2 . Если величина силы 2 Н, а плечо рычага 0,6 м, то величина крутящего момента составит 1,2 Нм. В показанный момент сила сообщает диску угловое ускорение α = τ /I = 7,5 рад/с. 2 , а своему центру масс сообщает линейное ускорение a = F / m = 4 м/с. 2 .

Результирующая сила [ править ]
Результирующая сила и крутящий момент заменяют действие системы сил, действующих на движение твердого тела. Интересным частным случаем является результат без крутящего момента, который можно найти следующим образом:
- Сложение векторов используется для нахождения чистой силы;
- Используйте уравнение для определения точки приложения при нулевом крутящем моменте:

где чистая сила, находит точку приложения, а отдельные силы с точками приложения . Возможно, не существует такой точки приложения, которая давала бы результат без крутящего момента.




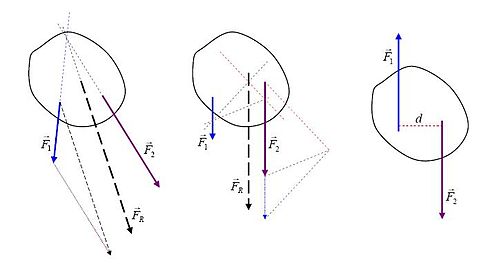
Схема напротив иллюстрирует простые графические методы нахождения линии приложения равнодействующей силы простых плоских систем:
- Линии приложения действующих сил и на крайнем левом рисунке пересекаются. После того, как сложение векторов выполнено «по местоположению ", полученная результирующая сила переводится так, что линия ее приложения проходит через общую точку пересечения. По отношению к этой точке все крутящие моменты равны нулю, поэтому крутящий момент результирующей силы равна сумме моментов действующих сил.
- На рисунке в середине диаграммы показаны две параллельные действующие силы. После сложения векторов "по местоположению ", результирующая сила переводится в соответствующую линию приложения, где она становится равнодействующей силой. . Процедура основана на разложении всех сил на составляющие, для которых линии приложения (бледные пунктирные линии) пересекаются в одной точке (так называемый полюс, произвольно установленный в правой части иллюстрации). Затем аргументы из предыдущего случая применяются к силам и их компонентам, чтобы продемонстрировать отношения крутящих моментов.
- На крайнем правом рисунке показана пара , две равные, но противоположные силы, для которых величина чистой силы равна нулю, но они создают чистый крутящий момент. где расстояние между линиями их применения. Поскольку результирующей силы нет, этот крутящий момент можно [есть?] описать как «чистый» крутящий момент.





Использование [ править ]

В общем, систему сил, действующих на твердое тело, всегда можно заменить одной силой плюс одним чистым (см. предыдущий раздел) крутящим моментом. Сила — это чистая сила, но для расчета дополнительного крутящего момента чистой силе необходимо приписать линию действия. Линия действия может быть выбрана произвольно, но от этого выбора зависит дополнительный чистый крутящий момент. В частном случае можно найти такую линию действия, при которой этот дополнительный момент равен нулю.
Результирующая сила и крутящий момент могут быть определены для любой конфигурации сил. Однако интересным частным случаем является результат без крутящего момента. Это полезно как концептуально, так и практически, поскольку тело движется, не вращаясь, как если бы оно было частицей.
Некоторые авторы не отличают результирующую силу от чистой силы и используют эти термины как синонимы . [4]
См. также [ править ]
Ссылки [ править ]
- ^ «Университетская физика, том 1» . openstax.org .
- ^ Саймон, Кейт Р. (1964), Механика, Аддисон-Уэсли, LCCN 60-5164
- ^ Майкл Дж. Кроу (1967). История векторного анализа: эволюция идеи векторной системы . Dover Publications (переиздание; ISBN 0-486-67910-1 ).
- ^ Резник, Роберт и Холлидей, Дэвид (1966), Физика, (Том I и II, объединенное издание), Wiley International Edition, Каталожная карточка Библиотеки Конгресса № 66-11527