Электромагнитный акустический преобразователь
Эта статья нуждается в дополнительных цитатах для проверки . ( май 2023 г. ) |
Электромагнитно -акустический преобразователь ( ЭМАП ) — преобразователь для бесконтактной генерации и приема акустических волн в проводящих материалах. Его действие основано на электромагнитных механизмах, не требующих прямого взаимодействия с поверхностью материала. Из-за отсутствия контактной жидкости ЭМАП особенно полезны в суровых условиях, т. е. в жарких, холодных, чистых или сухих средах. ЭМАП подходят для генерации всех видов волн в металлических и/или магнитострикционных материалах. В зависимости от конструкции и ориентации катушек и магнитов, поперечная горизонтальная (SH) объемная волна (нормальный или угловой луч), поверхностная волна, пластинчатые волны, такие как волны SH и волны Лэмба , а также все виды других объемных и направленных волн. волновые моды могут возбуждаться. [1] [2] [3] После десятилетий исследований и разработок EMAT нашел свое применение во многих отраслях, таких как производство и обработка металлов, автомобилестроение, железная дорога, трубопроводы, котлы и сосуды под давлением , [3] в которых они обычно используются для неразрушающего контроля (НК) металлических конструкций.
Основные компоненты
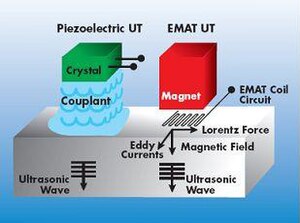
[ редактировать ]Датчик ЭМАП состоит из двух основных компонентов. Один из них представляет собой магнит, а другой — электрическую катушку. Магнит может быть постоянным магнитом или электромагнитом , который создает статическое или квазистатическое магнитное поле. В терминологии ЭМАП это поле называется магнитным полем смещения. Электрическая катушка приводится в действие электрическим сигналом переменного тока (AC) ультразвуковой частоты, обычно в диапазоне от 20 кГц до 10 МГц. В зависимости от потребностей приложения сигнал может быть непрерывным, импульсным или тональным. Электрическая катушка с переменным током также генерирует переменное магнитное поле. Когда испытуемый материал находится близко к ЭМАП, в испытуемом материале генерируются ультразвуковые волны за счет взаимодействия двух магнитных полей.
Механизм трансдукции
[ редактировать ]Существует два механизма генерации волн посредством взаимодействия магнитного поля. Одним из них является сила Лоренца , когда материал является проводящим. Другой — магнитострикция, когда материал ферромагнитный.
сила Лоренца
[ редактировать ]Переменный ток в электрической катушке создает вихревой ток на поверхности материала. Согласно теории электромагнитной индукции, вихревой ток распространяется только в очень тонком слое материала, называемом глубиной кожи. Эта глубина уменьшается с увеличением частоты переменного тока, проводимости и проницаемости материала. Обычно при возбуждении переменным током частотой 1 МГц глубина скин-слоя составляет лишь доли миллиметра для первичных металлов, таких как сталь, медь и алюминий. На вихревой ток в магнитном поле действует сила Лоренца . С микроскопической точки зрения сила Лоренца действует на электроны в вихревом токе. С макроскопической точки зрения сила Лоренца прикладывается к поверхностной области материала вследствие взаимодействия между электронами и атомами. Распределение силы Лоренца в первую очередь контролируется конструкцией магнита и конструкцией электрической катушки, а также свойствами испытуемого материала, относительным положением между преобразователем и испытуемой деталью, а также сигналом возбуждения преобразователя. Пространственное распределение силы Лоренца определяет точную природу упругих возмущений и то, как они распространяются от источника. Большинство успешных приложений ЭМАП основаны на механизме силы Лоренца. [4]
Магнитострикция
[ редактировать ]Ферромагнитный материал будет иметь изменение размеров при приложении внешнего магнитного поля. Этот эффект называется магнитострикцией . Поле магнитного потока расширяется или сжимается в зависимости от расположения ферромагнитного материала, имеющего индуцирующее напряжение в катушке, и на величину изменения влияют величина и направление поля. [5] Переменный ток в электрической катушке индуцирует переменное магнитное поле и, таким образом, вызывает магнитострикцию на ультразвуковой частоте в материале. Возмущения, вызванные магнитострикцией, затем распространяются в материале в виде ультразвуковой волны.
В поликристаллическом материале реакция магнитострикции очень сложна. На него влияют направление поля смещения, направление поля электрической катушки переменного тока, сила поля смещения и амплитуда переменного тока. В некоторых случаях при увеличении поля смещения можно наблюдать один или два пика отклика. В некоторых случаях отклик можно значительно улучшить за счет изменения относительного направления между подмагничивающим магнитным полем и магнитным полем переменного тока. Количественно магнитострикцию можно описать в том же математическом формате, что и пьезоэлектрические константы. [5] Эмпирически, чтобы полностью понять явление магнитострикции, необходим большой опыт.
Эффект магнитострикции использовался для генерации волн как SH-типа, так и волн Лэмба в стальных изделиях. В последнее время из-за более сильного магнитострикционного эффекта в никеле, чем в стали, для неразрушающего контроля стальных изделий были разработаны магнитострикционные датчики с использованием никелевых пластинок.
Сравнение с пьезоэлектрическими преобразователями
[ редактировать ]Как метод ультразвукового контроля (УЗК), ЭМАП обладает всеми преимуществами УЗК по сравнению с другими методами неразрушающего контроля. Как и пьезоэлектрические датчики УЗД, датчики ЭМАП могут использоваться в конфигурациях импульсно-эхо, улавливания тона и сквозной передачи. Датчики ЭМАП также могут быть собраны в датчики с фазированной решеткой, обеспечивающие возможности фокусировки и управления лучом. [6]
Преимущества
[ редактировать ]По сравнению с пьезоэлектрическими преобразователями датчики ЭМАП имеют следующие преимущества:
- Никакой контактной жидкости не требуется. Учитывая механизм трансдукции ЭМАП, контактная жидкость не требуется. Это делает EMAT идеальным для контроля при температурах ниже точки замерзания и выше точки испарения жидких контактных жидкостей. Это также делает его удобным в ситуациях, когда обращение с контактной жидкостью нецелесообразно.
- ЭМАТ – бесконтактный метод. Хотя близость является предпочтительной, физический контакт между преобразователем и испытуемым образцом не требуется.
- Сухой осмотр. Поскольку контактная жидкость не требуется, проверку ЭМАП можно проводить в сухой среде.
- Менее чувствителен к состоянию поверхности. При использовании контактных пьезоэлектрических преобразователей испытательная поверхность должна быть обработана гладко, чтобы обеспечить соединение. При использовании ЭМАТ требования к гладкости поверхности менее строгие; единственное требование – удалить отслоившуюся окалину и тому подобное.
- Легче развертывать датчики. При использовании пьезоэлектрического преобразователя на угол распространения волны в контролируемой части влияет закон Снеллиуса . В результате небольшое изменение в размещении датчика может вызвать значительное изменение угла преломления.
- Легче генерировать волны типа SH. При использовании пьезоэлектрических преобразователей SH-волну сложно соединить с испытуемой деталью. ЭМАП обеспечивает удобные средства генерации объемных и направленных волн SH.
Проблемы и недостатки
[ редактировать ]Недостатки ЭМАП по сравнению с пьезоэлектрическими УЗ можно резюмировать следующим образом:
- Низкая эффективность трансдукции. Преобразователи ЭМАП обычно выдают необработанный сигнал меньшей мощности, чем пьезоэлектрические преобразователи. В результате необходимы более сложные методы обработки сигналов для изоляции сигнала от шума.
- Ограничено металлическими или магнитными изделиями. НК пластика и керамики не подходит или, по крайней мере, неудобен с использованием ЭМАП.
- Ограничения по размеру. Хотя существуют датчики ЭМАП размером всего в копейку, обычно используемые датчики имеют большие размеры. Малозаметные проблемы ЭМАП все еще находятся в стадии исследования и разработки. Из-за ограничений по размеру фазированную решетку ЭМАП также сложно изготовить из очень маленьких элементов.
- Необходимо соблюдать осторожность при обращении с магнитами вокруг стальных изделий.
Приложения
[ редактировать ]ЭМАТ использовался в широком спектре приложений и имеет потенциал для использования во многих других. Краткий и неполный список выглядит следующим образом.
- Измерение толщины для различных применений [7]
- Дефектоскопия металлопродукции
- Проверка дефектов ламинирования пластины
- Обнаружение ламинирования склеенной структуры [8] [9]
- Лазерный контроль сварных швов автомобильных компонентов
- Проверка сварных швов соединений змеевиков, труб и трубок [10]
- Эксплуатационный осмотр трубопровода [11] [12]
- Инспекция железнодорожных рельсов и колес
- Контроль аустенитных сварных швов для электроэнергетики [6]
- Характеристика материала [13] [14]
Помимо вышеупомянутых применений, подпадающих под категорию неразрушающего контроля , ЭМАП используются в исследованиях ультразвуковой связи , где они генерируют и принимают акустический сигнал в металлической конструкции. [15] Ультразвуковая связь особенно полезна в тех областях, где невозможно использовать радиочастоту. Сюда входят подводные и подземные среды, а также герметичные среды, например, связь с датчиком внутри резервуара под давлением.
Использование ЭМАТ также изучается для биомедицинских применений. [16] в частности, для электромагнитно-акустической визуализации. [17] [18]
Ссылки
[ редактировать ]- ^ Р.Б. Томпсон, Физические принципы измерений с помощью датчиков ЭМАП, Ультразвуковые методы измерения, Физическая акустика Том XIX, под редакцией Р.Н. Терстона и Аллана Д. Пирса, Academic Press, 1990
- ^ Б.В. Максфилд, А. Курамото и Дж. К. Халберт, Оценка конструкции EMAT для избранных приложений, Mater. Эвал. , Том 45, 1987, с1166
- ^ Jump up to: а б Внутренние технологии
- ^ BW Максфилд и З. Ван, 2018, Электромагнитные акустические преобразователи для неразрушающего контроля, в Справочнике ASM, Том 17: Неразрушающий контроль материалов , изд. А. Ахмад и Л. Дж. Бонд, ASM International, Materials Park, Огайо, стр. 214–237.
- ^ Jump up to: а б Масахико Хирао и Хироцугу Оги, EMATS для науки и промышленности, Kluwer Academic Publishers, 2003 г.
- ^ Jump up to: а б Гао Х. и Б. Лопес, «Разработка одноканальных ЭМАП с фазированной решеткой для контроля аустенитных сварных швов», Materials Evaluation (ME), Vol. 68(7), 821-827 (2010).
- ^ М. Гори, С. Джамбони, Э. Д'Алессио, С. Гиа и Ф. Чернуски, «ЭМАП-преобразователи и определение толщины старых котельных труб», Ultrasonics 34 (1996) 339-342.
- ^ С. Диксон, С. Эдвардс и С. Б. Палмер, «Анализ адгезионных связей с использованием электромагнитно-акустических преобразователей», Ultrasonics Vol. 32 № 6, 1994.
- ^ Х. Гао, С.М. Али и Б. Лопес, «Эффективное обнаружение расслоения в многослойных структурах с использованием ЭМАП с ультразвуковой направленной волной» в журнале NDT&E International Vol. 43 июня 2010 г., стр: 316–322.
- ^ Х. Гао, Б. Лопес, С. М. Али, Дж. Флора и Дж. Монкс (Innerspec Technologies), «Линейное тестирование трубок ERW с использованием ультразвуковых волноводных ЭМАП» на 16-м Национальном конгрессе теоретической и прикладной механики США (USNCTAM2010- 384), Государственный колледж, Пенсильвания, США, 27 июня – 2 июля 2010 г.
- ^ М. Хирао и Х. Оги, «Техника ЭМАП SH-волны для проверки газопроводов», NDT&E International 32 (1999) 127-132.
- ^ Стефан Сэнсон, «Онлайн-инспекция трубопроводов: принципы и методы», Изд. Лавуазье, 2007 г.
- ^ Х. Оги, Х. Ледбеттер, С. Ким и М. Хирао, «Бесконтактная модально-селективная резонансная ультразвуковая спектроскопия: электромагнитный акустический резонанс», Журнал ASA, том. 106, стр. 660–665, 1999.
- ^ М.П. да Кунья и Дж.В. Джордан, «Улучшенный продольный датчик ЭМАП для извлечения упругой константы», в Proc. IEEE Интер. Частота. Контр. Симп, 2005, стр. 426–432.
- ^ X. Хуанг, Дж. Сание, С. Бахтиари и А. Хейфец, «Проектирование ультразвуковой системы связи с использованием электромагнитного акустического преобразователя», Международный симпозиум по ультразвуку IEEE (IUS), 2018 г., стр. 1–4.
- ^ Лю С., Чжан Р., Чжэн З., Чжэн Ю. (2018). «Электромагнитный − Акустическое зондирование для биомедицинских применений» Датчики . 18 ( 10): 3203. Bibcode : 2018Senso..18.3203L . doi : 10.3390/s18103203 . PMC 6210000. . PMID 30248969 .
{{cite journal}}: CS1 maint: несколько имен: список авторов ( ссылка ) - ^ Эмерсон Дж. Ф., Чанг Д. Б., Макнотон С., Эмерсон Э. М., Сервин С. А. (2021 г.). «Методы электромагнитно-акустической визуализации: разрешение, соотношение сигнал-шум и контраст изображения в фантомах» . J Med Imaging (Беллингем) . 8 (6): 067001. doi : 10.1117/1.JMI.8.6.067001 . ПМЦ 8685282 . ПМИД 34950749 .
{{cite journal}}: CS1 maint: несколько имен: список авторов ( ссылка ) - ^ Бунсанг С., Ричард Дж. Дьюхерст (март 2014 г.). Высокочувствительная лазерно-ЭМАП система визуализации для биомедицинских применений . 2014 Международный электротехнический конгресс (iEECON). дои : 10.1109/iEECON.2014.6925962 .
Кодексы и стандарты
[ редактировать ]- Стандартное руководство ASTM E1774-96 для электромагнитных акустических преобразователей (EMAT)
- ASTM E1816-96 Стандартная практика ультразвуковых исследований с использованием технологии электромагнитно-акустического преобразователя (EMAT)
- ASTM E1962-98 Стандартные методы испытаний для ультразвукового исследования поверхности с использованием технологии электромагнитно-акустического преобразователя (EMAT)