Понижающий преобразователь
Эта статья нуждается в дополнительных цитатах для проверки . ( январь 2009 г. ) |

Понижающий преобразователь или понижающий преобразователь — это преобразователь постоянного тока в постоянный , который уменьшает напряжение и увеличивает ток от входа ( питания ) к выходу ( нагрузке ). Это класс импульсного источника питания . Импульсные преобразователи (например, понижающие преобразователи) обеспечивают гораздо большую энергоэффективность в качестве преобразователей постоянного тока в постоянный, чем линейные стабилизаторы , которые представляют собой более простые схемы, рассеивающие мощность в виде тепла, но не повышающие выходной ток. [1] КПД понижающих преобразователей может быть очень высоким, часто более 90 %, что делает их полезными для таких задач, как преобразование основного напряжения питания компьютера , которое обычно составляет 12 В, в более низкое напряжение, необходимое для USB , DRAM и ЦП , которые обычно 5, 3,3 или 1,8 В.
Понижающие преобразователи обычно содержат как минимум два полупроводника ( диод и транзистор , хотя современные понижающие преобразователи часто заменяют диод вторым транзистором, используемым для синхронного выпрямления ) и как минимум один элемент накопления энергии ( конденсатор , катушка индуктивности или оба в комбинации). ). Чтобы уменьшить пульсации напряжения, к выходу (фильтр на стороне нагрузки) и входу (фильтр на стороне питания) такого преобразователя обычно добавляются фильтры из конденсаторов (иногда в сочетании с катушками индуктивности). [2] Его название происходит от индуктора, который «воздействует» или противодействует напряжению питания. [3]
Понижающие преобразователи обычно работают в диапазоне частот переключения от 100 кГц до нескольких МГц. Более высокая частота переключения позволяет использовать меньшие катушки индуктивности и конденсаторы, но также увеличивает потери эффективности из-за более частого переключения транзисторов.
Теория [ править ]
Этот раздел может быть слишком техническим для понимания большинства читателей . ( Апрель 2022 г. ) |
Этот раздел может содержать чрезмерное количество сложных деталей, которые могут заинтересовать только определенную аудиторию . ( декабрь 2022 г. ) |
стиле, Этот раздел может быть написан в слишком абстрактном чтобы быть понятным широкой аудитории . ( декабрь 2022 г. ) |




Основная концепция понижающего преобразователя заключается в следующем:
- Используйте напряжение источника, превышающее необходимое, чтобы быстро индуцировать ток в индукторе («включено» на рис. 2 и 4).
- Отключите источник и используйте инерцию тока в индукторе, чтобы обеспечить больший ток, чем выдает источник («выключено» на рис. 2 и 4). Для замыкания цепи при отключенном источнике необходим второй ключ, обычно диод.
Во включенном состоянии источнику может потребоваться на мгновение обеспечить больший ток, чем позволяет его номинал для постоянной нагрузки, но время включения слишком короткое, чтобы источник мог получить повреждение. В выключенном состоянии ток от источника не потребляется, и компоненты могут остыть. Среднее потребление тока в обоих состояниях должно быть ниже спецификации источника.
Чтобы выровнять скачки напряжения при переключении между включенным и выключенным состояниями, на выходной стороне используется конденсатор.
Механической аналогией понижающего преобразователя было бы крутить педали велосипеда одиночными сильными импульсами (сила ~ напряжение) и позволять велосипеду катиться между ними (инерция ~ индуктор).
Основная работа понижающего преобразователя заключается в том, что ток в индукторе контролируется двумя переключателями (рис. 2). В физической реализации эти переключатели реализованы с помощью транзистора и диода или двух транзисторов (что позволяет избежать потерь, связанных с падением напряжения на диоде).
Идеализированный случай [ править ]
Концептуальную модель понижающего преобразователя лучше всего понять с точки зрения связи между током и напряжением индуктора. Начиная с разомкнутого переключателя (выключенного состояния), ток в цепи равен нулю. Когда переключатель впервые замкнется (включенное состояние), ток начнет увеличиваться, и индуктор будет создавать противоположное напряжение на своих клеммах в ответ на изменение тока. Это падение напряжения противодействует напряжению источника и, следовательно, снижает чистое напряжение на нагрузке. Со временем скорость изменения тока уменьшается, а затем снижается и напряжение на дросселе, увеличивая напряжение на нагрузке. За это время индуктор запасает энергию в виде магнитного поля .
Если переключатель разомкнут, пока ток все еще меняется, то на дросселе всегда будет падение напряжения, поэтому чистое напряжение на нагрузке всегда будет меньше, чем входное напряжение источника. Когда переключатель снова разомкнется (выключенное состояние), источник напряжения будет удален из цепи, и ток уменьшится. Уменьшение тока вызовет падение напряжения на индукторе (противоположное падению во включенном состоянии), и теперь индуктор становится источником тока. Запасенная энергия в магнитном поле индуктора поддерживает ток через нагрузку. Этот ток, протекающий при отключенном источнике входного напряжения, при добавлении к току, протекающему во включенном состоянии, в сумме дает ток, превышающий средний входной ток (равный нулю в выключенном состоянии).
«Увеличение» среднего тока компенсирует снижение напряжения и в идеале сохраняет мощность, подаваемую на нагрузку. В выключенном состоянии индуктор разряжает накопленную энергию в остальную часть цепи. Если переключатель снова замыкается до того, как индуктор полностью разрядится (включенное состояние), напряжение на нагрузке всегда будет больше нуля.
Непрерывный режим [ править ]
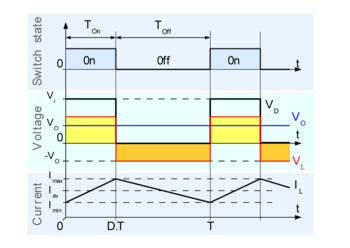
Понижающие преобразователи работают в непрерывном режиме, если ток через дроссель ( ) никогда не падает до нуля в течение цикла коммутации. В этом режиме принцип работы описывается графиками на рисунке 4: [2]

- Когда переключатель, изображенный выше, замкнут (верхняя часть рисунка 2), напряжение на катушке индуктивности равно . Ток через дроссель возрастает линейно (в приближении, пока падение напряжения практически постоянно). Поскольку диод смещен в обратном направлении источником напряжения V, ток через него не течет;
- Когда переключатель разомкнут (нижняя часть рисунка 2), диод смещен в прямом направлении. Напряжение на катушке индуктивности равно (пренебрегая падением напряжения на диоде). Текущий уменьшается.


Энергия, запасенная в индукторе L, равна

Таким образом, можно видеть, что энергия, запасенная в L, увеличивается во время включения как увеличивается, а затем уменьшается в выключенном состоянии. L используется для передачи энергии от входа к выходу преобразователя.
Скорость изменения можно рассчитать из:

С равный во включенном состоянии и во время выключенного состояния. Следовательно, увеличение тока во включенном состоянии определяется выражением:




где представляет собой скаляр, называемый рабочим циклом , со значением от 0 до 1.

И наоборот, уменьшение тока в выключенном состоянии определяется выражением:

Если предположить, что преобразователь работает в установившемся режиме, энергия, запасенная в каждом компоненте в конце цикла коммутации T, равна энергии в начале цикла. Это означает, что нынешний то же самое в и в (рисунок 4).


Итак, из приведенных выше уравнений это можно записать как:

Вышеупомянутая интеграция может быть выполнена графически. На рисунке 4 пропорциональна площади желтой поверхности, а к площади оранжевой поверхности, так как эти поверхности определяются напряжением индуктора (красные линии). Поскольку эти поверхности представляют собой простые прямоугольники, их площади можно легко найти: для желтого прямоугольника и для оранжевого. Для установившейся работы эти площади должны быть равны.




Как видно на рисунке 4, и .


Это дает:

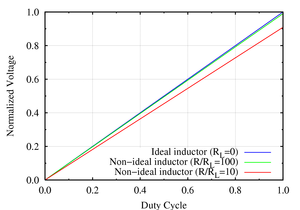
Из этого уравнения видно, что выходное напряжение преобразователя изменяется линейно в зависимости от рабочего цикла для данного входного напряжения. Поскольку рабочий цикл равен отношению между и период , оно не может быть больше 1. Следовательно, . Вот почему этот преобразователь называется понижающим преобразователем .



Так, например, для понижения напряжения с 12 В до 3 В (выходное напряжение, равное одной четверти входного напряжения) в этой теоретически идеальной схеме потребуется коэффициент заполнения 25 %.
Прерывистый режим [ править ]

В некоторых случаях количество энергии, необходимое нагрузке, слишком мало. В этом случае ток через дроссель в течение части периода падает до нуля. Единственное отличие описанного выше принципа состоит в том, что индуктор полностью разряжается в конце цикла коммутации (см. рисунок 5). Однако это оказывает некоторое влияние на предыдущие уравнения.
Падение тока дросселя ниже нуля приводит к разрядке выходного конденсатора в течение каждого цикла и, следовательно, к более высоким потерям переключения . другой метод управления, известный как частотно-импульсная модуляция Для минимизации этих потерь можно использовать .
Мы по-прежнему считаем, что преобразователь работает в установившемся режиме. Поэтому энергия в индукторе одинакова в начале и в конце цикла (в случае разрывного режима она равна нулю). Это означает, что среднее значение напряжения индуктора (V L ) равно нулю; то есть, что площади желтого и оранжевого прямоугольников на рисунке 5 одинаковы. Это дает:

Таким образом, значение δ равно:

Выходной ток, подаваемый в нагрузку ( ) является постоянным, поскольку мы считаем, что выходной конденсатор достаточно велик, чтобы поддерживать постоянное напряжение на его выводах во время цикла коммутации. Это означает, что ток, протекающий через конденсатор, имеет нулевое среднее значение. Поэтому мы имеем:


Где – среднее значение тока индуктора. Как видно на рисунке 5, форма волны тока индуктора имеет треугольную форму. Следовательно, среднее значение I L можно определить геометрически следующим образом:


Ток индуктора вначале равен нулю и возрастает в течение t on до I Lmax . Это означает, что I L max равно:

Подстановка значения I Lmax в предыдущее уравнение приводит к:

И замена δ выражением, приведенным выше, дает:

Это выражение можно переписать как:

Видно, что выходное напряжение понижающего преобразователя, работающего в прерывистом режиме, намного сложнее, чем его аналог в непрерывном режиме. Более того, выходное напряжение теперь является функцией не только входного напряжения (V i ) и рабочего цикла D, но также величины дросселя (L), периода коммутации (T) и выходного тока (I o ).
От прерывистого режима к непрерывному (и наоборот) [ править ]

Преобразователь работает в прерывистом режиме, когда нагрузка потребляет малый ток, и в непрерывном режиме при более высоких уровнях тока нагрузки. Граница между прерывистым и непрерывным режимами достигается, когда ток дросселя падает до нуля точно в конце цикла коммутации. Используя обозначения рисунка 5, это соответствует:

Следовательно, выходной ток (равный среднему току дросселя) на границе между прерывистым и непрерывным режимами равен (см. выше):

Подставив I Lmax на его значение:

На границе между двумя режимами выходное напряжение подчиняется обоим выражениям, приведенным соответственно в непрерывном и прерывистом разделах. В частности, первый

Поэтому I olim можно записать как:

Теперь введем еще два обозначения:
- нормализованное напряжение, определяемое формулой . Оно равно нулю, когда и 1, когда ;
- нормированный ток, определяемый формулой . Термин равен максимальному увеличению тока индуктора за цикл; т.е. увеличение тока дросселя с коэффициентом заполнения D=1. Итак, при установившейся работе преобразователя это означает, что равно 0 при отсутствии выходного тока и 1 при максимальном токе, который может обеспечить преобразователь.






Используя эти обозначения, имеем:
- в непрерывном режиме:
- в прерывистом режиме:


ток на границе между непрерывным и прерывистым режимом равен:

Следовательно, место предела между непрерывным и прерывистым режимами определяется выражением:

Эти выражения представлены на рисунке 6. Из этого можно сделать вывод, что в непрерывном режиме выходное напряжение зависит только от рабочего цикла, тогда как в прерывистом режиме оно гораздо сложнее. Это важно с точки зрения контроля.
На уровне схемы обнаружение границы между CCM и DCM обычно обеспечивается измерением тока индуктора, что требует высокой точности и быстрых детекторов, таких как: [4] [5]
Реальные факторы
Приведенный выше анализ был проведен с предположениями:
- Выходной конденсатор имеет достаточную емкость для подачи питания на нагрузку (простое сопротивление) без каких-либо заметных изменений ее напряжения.
- Падение напряжения на диоде при прямом смещении равно нулю.
- Отсутствие коммутационных потерь ни в переключателе, ни в диоде.
Эти предположения могут быть достаточно далеки от реальности, а несовершенство реальных компонентов может пагубно сказаться на работе преобразователя.
выходного напряжения (непрерывный режим ) Пульсации
Пульсации выходного напряжения — это название явления, при котором выходное напряжение возрастает во включенном состоянии и падает в выключенном состоянии. Этому способствуют несколько факторов, включая, помимо прочего, частоту переключения, выходную емкость, катушку индуктивности, нагрузку и любые токоограничивающие функции схемы управления. На самом базовом уровне выходное напряжение будет повышаться и падать в результате зарядки и разрядки выходного конденсатора:

Мы можем лучше всего аппроксимировать пульсации выходного напряжения, сместив форму сигнала выходного тока в зависимости от времени (непрерывный режим) вниз так, чтобы средний выходной ток располагался вдоль оси времени. Когда мы делаем это, мы видим форму сигнала переменного тока, втекающего в выходной конденсатор и выходящего из него (пилообразная форма сигнала). Заметим, что V c-min (где V c — напряжение конденсатора) возникает при t on /2 (сразу после разрядки конденсатора), а V c-max — при t off /2. Интегрируя I d t (= d Q ; как I = d Q /d t , C = Q / V , поэтому d V = d Q / C ) под форму сигнала выходного тока, записывая выходное пульсирующее напряжение как d V = I d t / C мы интегрируем площадь над осью, чтобы получить размах пульсирующего напряжения как: Δ V = Δ I T /8 C (где Δ I — размах пульсирующего тока, а T — период времени Здесь дается полное объяснение.) Из базовой теории цепей переменного тока мы отмечаем, что наше пульсирующее напряжение должно быть примерно синусоидальным: сопротивление конденсатора, умноженное на размах пульсирующего тока, или Δ V = Δ I / (2ω C ), где. ω = 2π f , f — частота пульсаций, а f = 1/ T , T — период пульсаций. Это дает: Δ V = Δ I T /2π C ), и мы сравниваем это значение, чтобы подтвердить вышеизложенное, поскольку мы имеем коэффициент 8 против коэффициента ~ 6,3 из базовой теории цепей переменного тока для синусоиды. Это придает уверенности в нашей оценке пульсаций напряжения. Абзац, расположенный непосредственно ниже, относится к тому, что непосредственно выше, и может быть неверным. Используйте уравнения в этом параграфе. Еще раз, пожалуйста, посетите вкладку обсуждения, чтобы узнать больше: о пульсациях выходного напряжения и AoE (Искусство электроники, 3-е издание).
В выключенном состоянии ток в этом уравнении является током нагрузки. Во включенном состоянии ток представляет собой разницу между током переключателя (или током источника) и током нагрузки. Продолжительность времени (d T ) определяется рабочим циклом и частотой переключения.
Для включенного состояния:

Для выключенного состояния:

Качественно, по мере увеличения выходной емкости или частоты переключения величина пульсаций уменьшается. Пульсации выходного напряжения обычно зависят от конструкции источника питания и выбираются на основе нескольких факторов. Выбор конденсатора обычно определяется на основе стоимости, физического размера и неидеальности различных типов конденсаторов. Выбор частоты переключения обычно определяется на основе требований к эффективности, которая имеет тенденцию снижаться при более высоких рабочих частотах, как описано ниже в разделе « Влияние неидеальности на эффективность» . Более высокая частота переключения также может вызвать проблемы с электромагнитными помехами.
Пульсации выходного напряжения являются одним из недостатков импульсного блока питания, а также могут быть мерой его качества.
эффективность Влияние на
Приведенный выше упрощенный анализ не учитывает неидеальность компонентов схемы и не учитывает требуемую схему управления. Потери мощности на схемах управления обычно незначительны по сравнению с потерями в силовых устройствах (переключателях, диодах, катушках индуктивности и т.п.). Основная часть потерь мощности в преобразователе приходится на неидеальность силовых устройств.
В любом импульсном стабилизаторе происходят как статические, так и динамические потери мощности. Статические потери мощности включают в себя Потери (проводимости) в проводах или дорожках печатной платы, а также в переключателях и индукторах, как и в любой электрической цепи. Динамические потери мощности происходят в результате переключения, например, при зарядке и разрядке затвора переключателя, и пропорциональны частоте переключения.

Полезно начать с расчета рабочего цикла неидеального понижающего преобразователя, который составляет:

где:
- V sw – падение напряжения на силовом ключе,
- V sw,sync — падение напряжения на синхронном переключателе или диоде, а
- V L – падение напряжения на дросселе.
Описанные выше падения напряжения представляют собой статические потери мощности, которые зависят в первую очередь от постоянного тока и поэтому могут быть легко рассчитаны. Для падения на диоде значения V sw и V sw,sync могут быть уже известны в зависимости от свойств выбранного устройства.

где:
- R on — сопротивление включения каждого переключателя, а
- R DC — сопротивление катушки индуктивности постоянному току.
Уравнение рабочего цикла является несколько рекурсивным. Грубый анализ можно провести, сначала рассчитав значения V sw и V sw,sync с использованием уравнения идеального рабочего цикла.
Для падения напряжения на МОП-транзисторе общепринятым приближением является использование R DSon из таблицы данных полевого МОП-транзистора в законе Ома, V = I DS R DSon(sat) . Это приближение приемлемо, поскольку МОП-транзистор находится в линейном состоянии с относительно постоянным сопротивлением сток-исток. Это приближение справедливо только при относительно низких значениях VDS . Для более точных расчетов таблицы данных MOSFET содержат графики зависимости V DS и I DS при нескольких значениях V GS . Наблюдайте за V DS на V GS и I DS , которые наиболее точно соответствуют ожидаемому в понижающем преобразователе. [6]
Кроме того, потери мощности происходят из-за токов утечки. Эта потеря мощности просто

где:
- I утечка — ток утечки переключателя, а
- V — напряжение на переключателе.
Динамические потери мощности обусловлены коммутационным поведением выбранных проходных устройств ( MOSFET , силовых транзисторов , IGBT и т. д.). Эти потери включают потери при включении и выключении, а также потери при переключении.
Потери при включении и выключении переключателя легко сгруппировать как

где:
- V - напряжение на переключателе, когда переключатель выключен,
- t нарастания и t падения — время нарастания и спада переключателя, а
- T — период переключения
но это не учитывает паразитную емкость полевого МОП-транзистора, из которого состоит пластина Миллера . Тогда потери на переключателе будут примерно такими:

Когда в качестве нижнего ключа используется полевой МОП-транзистор, могут возникнуть дополнительные потери в течение времени между выключением ключа верхнего плеча и включением ключа нижнего плеча, когда основной диод полевого МОП-транзистора нижнего плеча проводит выходной ток. Это время, известное как время неперекрытия, предотвращает «прострел», состояние, при котором оба переключателя одновременно включены. Начало прострела приводит к серьезным потерям мощности и нагреву. Правильный выбор времени неперекрытия должен сбалансировать риск пробоя с увеличением потерь мощности, вызванных проводимостью основного диода. Многие понижающие преобразователи на основе МОП-транзисторов также включают в себя диод, который обеспечивает проводимость нижнего диода корпуса МОП-транзистора в период отсутствия перекрытия. Когда диод используется исключительно для нижнего ключа, время прямого включения диода может снизить эффективность и привести к выбросу напряжения. [7]
Потери мощности на корпусном диоде также пропорциональны частоте переключения и составляют

где:
- V F — прямое напряжение основного диода, а
- t no — выбранное время неперекрытия.
Наконец, потери мощности происходят из-за мощности, необходимой для включения и выключения переключателей. Для переключателей MOSFET в этих потерях преобладает энергия, необходимая для зарядки и разрядки емкости затвора MOSFET между пороговым напряжением и выбранным напряжением затвора. Эти потери при переходе переключателя возникают в первую очередь в драйвере затвора и могут быть сведены к минимуму путем выбора МОП-транзисторов с низким зарядом затвора, перевода затвора МОП-транзистора на более низкое напряжение (за счет увеличения потерь проводимости МОП-транзистора) или работы на более низкой частоте. .

где:
- Q G — заряд затвора выбранного МОП-транзистора, а
- V GS — пиковое напряжение затвор-исток.
Для N-MOSFET ключ верхнего плеча должен быть подключен к более высокому напряжению, чем V i . Для достижения этой цели драйверы затворов MOSFET обычно подают выходное напряжение MOSFET обратно в драйвер затвора. Затем драйвер затвора добавляет свое собственное напряжение питания к выходному напряжению MOSFET при управлении МОП-транзисторами верхнего плеча, чтобы получить V GS , равное напряжению питания драйвера затвора. [8] нижнего плеча Поскольку V GS является напряжением питания драйвера затвора, это приводит к очень схожим значениям V GS для МОП-транзисторов верхнего и нижнего плеча.
Полная конструкция понижающего преобразователя включает в себя компромиссный анализ различных потерь мощности. Дизайнеры балансируют эти потери в соответствии с ожидаемым использованием готового проекта. Преобразователь, который, как ожидается, будет иметь низкую частоту переключения, не требует переключателей с низкими потерями на переходе затвора; Преобразователь, работающий с высоким рабочим циклом, требует переключателя нижнего плеча с низкими потерями проводимости.
Конкретные структуры [ править ]
Синхронное выпрямление [ править ]

Синхронный понижающий преобразователь представляет собой модифицированную версию базовой топологии схемы понижающего преобразователя, в которой диод D заменен вторым переключателем S2 . Эта модификация представляет собой компромисс между увеличением стоимости и повышением эффективности.
В стандартном понижающем преобразователе обратноходовой диод включается самостоятельно вскоре после выключения ключа в результате повышения напряжения на диоде. Падение напряжения на диоде приводит к потерям мощности, равным

где:
- V D – падение напряжения на диоде при токе нагрузки I o ,
- D - рабочий цикл, а
- I o – ток нагрузки.
Заменив диод переключателем, выбранным с учетом малых потерь, можно повысить эффективность преобразователя. Например, МОП-транзистор с очень низким значением R Dson может быть выбран для S 2 , обеспечивающий потери мощности на переключателе 2, что

В обоих случаях потери мощности сильно зависят от рабочего цикла D. Потери мощности на обратном диоде или нижнем ключе будут пропорциональны времени его включения. Следовательно, системы, предназначенные для работы с малым рабочим циклом, будут страдать от более высоких потерь в обратном диоде или нижнем ключе, и для таких систем выгодно рассмотреть конструкцию синхронного понижающего преобразователя.
Рассмотрим компьютерный блок питания , у которого на входе 5 В, на выходе 3,3 В, а ток нагрузки 10 А. В этом случае рабочий цикл составит 66%, а диод будет включен 34% времени. . Типичный диод с прямым напряжением 0,7 В потеряет мощность 2,38 Вт. Однако правильно выбранный МОП-транзистор с сопротивлением RDSon 0,015 Ом потеряет всего 0,51 Вт на потери проводимости. Это приводит к повышению эффективности и снижению выделения тепла.
Еще одним преимуществом синхронного преобразователя является то, что он является двунаправленным, что позволяет использовать его в приложениях, требующих рекуперативного торможения . Когда мощность передается в «обратном» направлении, она действует во многом как повышающий преобразователь .
Преимущества синхронного понижающего преобразователя не обходятся без затрат. Во-первых, нижний ключ обычно стоит дороже, чем обратный диод. Во-вторых, сложность преобразователя значительно возрастает из-за необходимости в драйвере переключателя с комплементарным выходом.
Такой драйвер должен предотвращать одновременное включение обоих переключателей - неисправность, известная как «прострел». Самый простой способ избежать прострела — это временная задержка между выключением S1 и включением S2 и наоборот. Однако установка этой задержки времени на достаточно большую величину, чтобы гарантировать, что S 1 и S 2 никогда не будут включены одновременно, сама по себе приведет к избыточным потерям мощности. Усовершенствованный метод предотвращения этого состояния известен как адаптивная защита «без перекрытия», при которой напряжение в коммутационном узле (точке соединения S1 , S2 и L) измеряется для определения его состояния. Когда напряжение коммутационного узла превышает заданный порог, запускается задержка времени. Таким образом, драйвер может адаптироваться ко многим типам переключателей без чрезмерных потерь мощности, которые могла бы вызвать такая гибкость при фиксированном времени неперекрытия.
Переключатели как нижнего, так и верхнего плеча могут быть выключены в ответ на переходный процесс нагрузки, и основной диод в МОП-транзисторе нижнего плеча или другой диод, включенный параллельно с ним, становится активным. В этом случае более высокое падение напряжения на переключателе нижнего плеча приносит пользу, помогая снизить выходной ток и быстрее удовлетворить новые требования к нагрузке.
Многофазный понижающий фактор [ править ]


Многофазный понижающий преобразователь представляет собой топологию схемы, в которой основные схемы понижающего преобразователя размещаются параллельно между входом и нагрузкой. Каждая из n «фаз» включается через равные промежутки времени в течение периода переключения. Эта схема обычно используется с топологией синхронного понижающего преобразователя , описанной выше.
Преобразователь этого типа может реагировать на изменения нагрузки так же быстро, как если бы он переключался в n раз быстрее, без увеличения коммутационных потерь, которые это могло бы вызвать. Таким образом, он может реагировать на быстро меняющиеся нагрузки, как, например, современные микропроцессоры.
Также наблюдается значительное уменьшение пульсаций переключения. Снижение происходит не только за счет увеличения эффективной частоты, [9] но каждый раз, когда n коэффициент заполнения раз равен целому числу, пульсация переключения становится равной 0; Скорость, с которой ток дросселя увеличивается во включенных фазах, точно соответствует скорости, с которой он уменьшается в выключенных фазах.
Еще одним преимуществом является то, что ток нагрузки распределяется между n фазами многофазного преобразователя. Такое разделение нагрузки позволяет распределить тепловые потери на каждом из коммутаторов по большей площади.
Эта топология схемы используется в материнских платах компьютеров для преобразования постоянного тока источника питания 12 В в более низкое напряжение (около 1 В), подходящее для ЦП . Требования к мощности современных процессоров могут превышать 200 Вт. [10] может меняться очень быстро и иметь очень жесткие требования к пульсациям, менее 10 мВ. Типичные блоки питания процессора, встречающиеся на материнских платах массового спроса, используют 3 или 4 фазы, тогда как системы высокого класса могут иметь 16 и более фаз.
Одной из основных проблем, присущих многофазному преобразователю, является обеспечение равномерной балансировки тока нагрузки по n фазам. Эту балансировку тока можно выполнить несколькими способами. Ток можно измерить «без потерь», измеряя напряжение на дросселе или нижнем переключателе (когда он включен). Этот метод считается без потерь, поскольку он основан на резистивных потерях, присущих топологии понижающего преобразователя. Другой метод — вставить в цепь небольшой резистор и измерить напряжение на нем. Этот подход более точен и настраиваем, но требует ряда затрат — места, эффективности и денег.
Наконец, ток можно измерить на входе. Напряжение можно измерить без потерь, на верхнем переключателе или с помощью силового резистора, чтобы приблизительно определить потребляемый ток. Этот подход технически более сложен, поскольку шум переключения невозможно легко отфильтровать. Однако это дешевле, чем наличие сенсорного резистора для каждой фазы.
Эффективность [ править ]
На эффективность влияют два основных явления: потери проводимости и потери переключения.
Потери проводимости возникают, когда ток протекает через компоненты, и, таким образом, зависят от нагрузки. Они вызваны эффектом Джоуля в сопротивлении, когда транзистор или MOSFET-переключатель проводит ток, сопротивлении обмотки индуктора и эквивалентном последовательном сопротивлении конденсатора. Потери в этом случае пропорциональны квадрату тока. Потери проводимости также возникают из-за падения прямого напряжения на диоде (обычно 0,7 В или 0,4 В для диода Шоттки ) и в этом случае пропорциональны току.
Потери переключения возникают в транзисторе и диоде, когда напряжение и ток перекрываются во время переходов между закрытым и открытым состояниями. Диод Шоттки можно использовать для минимизации потерь переключения, вызванных обратным восстановлением обычного PN-диода . [11] Потери переключения пропорциональны частоте переключения.
В полноценном реальном понижающем преобразователе также имеется схема управления для регулирования выходного напряжения или тока дросселя. Эта схема и контроллер затвора MOSFET потребляют мощность, влияющую на общую эффективность преобразователя. [12]
Согласование импеданса [ править ]
Понижающий преобразователь можно использовать для максимизации передачи мощности за счет согласования импеданса . Это применяется в устройствах отслеживания точки максимальной мощности, обычно используемых в фотоэлектрических системах. Это особенно полезно в приложениях, где импедансы динамически изменяются.
См. также [ править ]
Ссылки [ править ]
- ^ «Понимание преимуществ и недостатков линейных регуляторов | DigiKey» . Архивировано из оригинала 23 сентября 2016 года . Проверено 11 июля 2016 г.
- ^ Jump up to: Перейти обратно: а б Маммано, Роберт (1999). «Топология импульсного источника питания: режим напряжения и режим тока» (PDF) . Техас Инструментс Инкорпорейтед.
- ^ Мак, Раймонд (2008). «Основные коммутационные схемы». Источники питания и расходные материалы . стр. 13–28. дои : 10.1016/B978-0-7506-8626-6.00002-8 . ISBN 978-0-7506-8626-6 .
- ^ «Детектор перехода через ноль тока индуктора и граничный детектор CCM/DCM для интегрированных сильноточных импульсных преобразователей постоянного тока в постоянный» .
- ^ «Детектор границ CCM/DCM во временной области с нулевым статическим энергопотреблением» .
- ^ «Список технических характеристик силовых МОП-транзисторов» . www.magnachip.com . МагнаЧип . Проверено 25 января 2015 г.
- ^ Уильямс, Джим (1 января 2009 г.). «Отказы в импульсных регуляторах, вызванные временем включения диода» .
- ^ «Техническое описание NCP5911» (PDF) . www.onsemi.com . ОН Полупроводник . Проверено 25 января 2015 г.
- ^ Ги Сегье, Силовая электроника , 7-е издание, Dunod, Париж, 1999 (на французском языке)
- ^ «Анализ энергопотребления в режиме ожидания/пикового режима — разгон Core i7: мощность и производительность» . tomshardware.com . 13 апреля 2009 г.
- ^ «Силовые диоды, диоды Шоттки и анализ диодов с быстрым восстановлением» . Электронная клиника . 12 октября 2020 г. Проверено 9 августа 2022 г.
- ^ «iitb.ac.in — понижающий преобразователь» (PDF) . Архивировано из оригинала (PDF) 16 июля 2011 года. 090424 ee.iitb.ac.in.
Библиография [ править ]
- Джулиан, П.; Олива, А.; Мандолези, П.; Кьяккиарини, Х. (1997). «Выходное дискретное управление с обратной связью понижающего преобразователя постоянного тока». ISIE '97 Труды Международного симпозиума IEEE по промышленной электронике . стр. 925–930. doi : 10.1109/ISIE.1997.648847 . ISBN 0-7803-3936-3 . S2CID 108606109 .
- Кьяккиарини, Х.; Мандолези, П.; Олива, А. (1999). «Нелинейный аналоговый регулятор для понижающего преобразователя: теория и результаты эксперимента». МСЭ '99. Материалы Международного симпозиума IEEE по промышленной электронике (кат. № 99TH8465) . Том. 2. С. 601–606. дои : 10.1109/ISIE.1999.798680 . ISBN 0-7803-5662-4 . S2CID 111350228 .
- Д'Амико, Мария Белен; Олива, Алехандро; Паолини, Эдуардо; Герен, Николас (2006). «Бифуркационное управление понижающим преобразователем в режиме разрывной проводимости» . Тома трудов МФБ . 39 (8): 389–394. дои : 10.3182/20060628-3-FR-3903.00069 .
- Олива, А.; Кьяккиарини, Х.; Бортолотто, Г. (2005). «Разработка регулятора обратной связи по состоянию синхронного понижающего преобразователя». Латиноамериканские прикладные исследования . 35 (2): 83–88. S2CID 15484269 .
- Белен Д'Амико, Мария; Герен, Николас; Олива, Алехандро; Паолини, Эдуардо Э. (1 июля 2007 г.). «Динамика понижающего преобразователя с цифровым ПИ-регулятором» . Ибероамериканский журнал промышленной автоматики и информатики RIAI . 4 (3): 126–131. дои : 10.1016/S1697-7912(07)70232-7 . hdl : 11336/105855 .
- Чирчи, Фернандо; Паолини, Эдуардо Э. (октябрь 2009 г.). «Дискретное моделирование и управление синхронным понижающим преобразователем» . 2009 Аргентинская школа микронаноэлектроники, технологий и приложений . стр. 5–10. ISBN 978-1-4244-4835-7 .
Внешние ссылки [ править ]
- https://www.ipes.ethz.ch/mod/lesson/view.php?id=2 Интерактивный семинар по силовой электронике (iPES)] Множество Java-апплетов, демонстрирующих работу преобразователей.
- Управление цифровым понижающим преобразователем на основе модели Описание и рабочая диаграмма исходного кода VisSim для недорогого цифрового управления понижающими преобразователями постоянного тока.
- SPICE-моделирование понижающего преобразователя
- Учебное пособие по импульсному источнику питания — подробная статья о преобразователях постоянного тока, в которой дается более формальный и подробный анализ понижающего преобразователя, включая эффекты неидеального переключения ( но обратите внимание, что диаграмма повышающе-понижающего преобразователя не учитывает инверсия полярности напряжения между входом и выходом).
- Преобразователь мощности постоянного тока в постоянный практический пример
- Об оптимизации энергоэффективности
- Многофазный преобразователь постоянного тока в постоянный
| Базы данных органов управления : Национальные |
|---|