Мышечная модель Хилла
В биомеханике . мышечная модель Хилла относится к трехэлементной модели, состоящей из сократительного элемента (CE) последовательно со слегка демпфируемым упругим пружинным элементом (SE) и параллельно со слегка демпфируемым эластичным параллельным элементом (PE) В рамках этой модели расчетное соотношение силы и скорости для элемента CE обычно моделируется с помощью так называемого уравнения Хилла, которое было основано на тщательных экспериментах, включающих тетанизированное сокращение мышц , в ходе которых измерялись различные мышечные нагрузки и связанные с ними скорости. Их вывел знаменитый физиолог Арчибальд Вивиан Хилл , который к 1938 году, когда представил эту модель и уравнение, уже получил Нобелевскую премию по физиологии. Он продолжал публиковаться в этой области до 1970 года. Существует множество форм базовых моделей «Хилл» или «Хилл-тип», причем в сотнях публикаций эта структура модели использовалась для экспериментальных и имитационных исследований. Эту модель используют большинство основных пакетов моделирования опорно-двигательного аппарата.
Уравнение силы-скорости А.В. Хилла для тетанизированной мышцы
[ редактировать ]Это популярное уравнение состояния , применимое к скелетным мышцам , которые были стимулированы для проявления тетанического сокращения . Он связывает напряжение со скоростью с учетом внутренней термодинамики . Уравнение

где
- напряжение (или нагрузка) в мышце
- это скорость сокращения
- - максимальное изометрическое напряжение (или нагрузка), создаваемое в мышце
- коэффициент сокращения тепла
- — максимальная скорость, когда







Хотя уравнение Хилла очень похоже на уравнение Ван дер Ваальса , первое имеет единицы диссипации энергии , а второе — единицы энергии . Уравнение Хилла показывает, что связь между F и v является гиперболической . Следовательно, чем выше нагрузка, приложенная к мышце, тем ниже скорость сокращения. Аналогично, чем выше скорость сокращения, тем ниже напряжение в мышце. Было обнаружено, что эта гиперболическая форма соответствует эмпирической константе только во время изотонических сокращений вблизи длины покоя. [ 1 ]
Напряжение мышц уменьшается по мере увеличения скорости сокращения. Эта особенность объясняется двумя основными причинами. Основным, по-видимому, является потеря напряжения, поскольку мостики в сократительном элементе перекрещиваются , а затем восстанавливаются в укороченном состоянии. Второй причиной, по-видимому, является вязкость жидкости как в сократительном элементе, так и в соединительной ткани. Какая бы ни была причина потери натяжения, это вязкое трение , и поэтому его можно смоделировать как жидкостный демпфер. . [ 2 ]
Трехэлементная модель
[ редактировать ]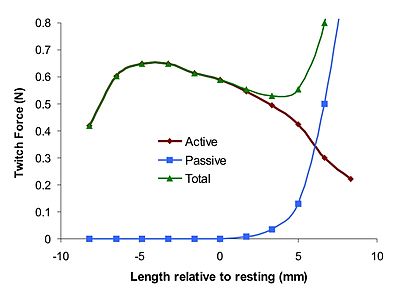


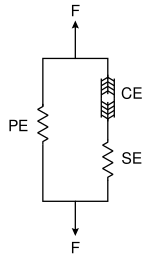
Трехэлементная мышечная модель Хилла представляет собой представление механической реакции мышц. Модель состоит из сократительного элемента ( CE ) и двух нелинейных пружинных элементов , одного последовательного ( SE ), а другого параллельного ( PE ). Активная сила сократительного элемента возникает за счет силы, создаваемой актина и миозина поперечными мостиками на уровне саркомера . Он полностью расширяем в неактивном состоянии, но может сокращаться при активации. фасция Соединительные ткани ( ), окружающие сократительный элемент , , эпимизий , перимизий и эндомизий влияют на кривую силы-длины мышцы. Параллельный элемент представляет собой пассивную силу этих соединительных тканей и имеет механическое поведение мягких тканей . Параллельный элемент отвечает за пассивное поведение мышцы при ее растяжении , даже когда сократительный элемент не активирован. Элемент серии представляет сухожилие и внутреннюю эластичность миофиламентов. Он также обладает реакцией мягких тканей и обеспечивает механизм накопления энергии. [ 2 ] [ 3 ]
Чистые характеристики силы-длины мышцы представляют собой комбинацию характеристик силы-длины как активных, так и пассивных элементов. Силы в сократительном элементе, последовательном элементе и параллельном элементе , и , соответственно, удовлетворяют




С другой стороны, длина мышцы и длины , и из этих элементов удовлетворяют





Во время изометрических сокращений последовательный эластичный компонент находится под напряжением и, следовательно, растягивается на конечную величину. Поскольку общая длина мышцы сохраняется постоянной, растяжение последовательного элемента может произойти только при равном укорочении самого сократительного элемента. [ 2 ]
Силы в параллельных, последовательных и сократительных элементах определяются: где являются мерами деформации для различных элементов, определяемых: где - длина деформированной мышцы и – длина мышцы, деформированная из-за движения сократительного элемента, как из уравнения (3). - остальная длина мышцы. можно разделить как . Силовой термин, , – пиковая изометрическая мышечная сила и функции даны:









![{\displaystyle {\begin{array}{lcr}f^{PE}(\lambda _{f})={\begin{cases}2cA(\lambda _{f}-1)e^{c(\lambda _{f}-1)^{2}},&\lambda _{f}>1\\{\text{0}},&{\text{иначе}}\end{cases}},&(6)\\[4pt]f^{SE}(\lambda ^{ SE},\lambda ^{CE})={\begin{cases}0.1(e^{100\lambda ^{CE}(\lambda ^{SE}-1)}-1),&\lambda ^{SE}\geq 1\\{\text{0}},&{\text{иначе}}\end{cases}},&(7 )\\[4pt]f_{L}^{CE}(\lambda ^{CE})={\begin{cases}-4(\lambda ^{CE}-1)^{2}+1,&0.5\leq \lambda ^{CE}\leq 1.5\\{\text{0}},&{\text{иначе}}\end{cases }},&(8)\\[4pt]f_{V}^{CE}({\dot {\lambda }}^{CE})={\begin{cases}{\text{0}},&{\dot {\lambda }}^{CE}<-10s^{-1}\\-{\frac { 1}{\arctan(5)}}\arctan(-0.5{\dot {\lambda }}^{CE})+1,&-10s^{-1}\leq {\dot {\lambda }}^{CE}\leq 2s^{-1}\\{\frac {\pi }{4\arctan(5)}}+1,&{\dot {\lambda }}^{CE }>2s^{-1}\end{cases}},&(9)\end{array}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0d6ee32e4a7f6a34f426ad1573796050962f5504)
где являются эмпирическими константами. Функция из уравнения (4) представляет собой мышечную активацию. Он определяется на основе обыкновенного дифференциального уравнения: где являются постоянными времени, связанными с подъемом и спадом мышечной активации и — минимальная граница, определяемая экспериментально. Это нервное возбуждение, которое приводит к сокращению мышц. [ 4 ] [ 5 ]






вязкоупругость
[ редактировать ]Мышцы обладают вязкоупругостью , поэтому в модель можно включить вязкий демпфер, если динамику сокращений второго порядка критически затухающих рассматривать . Одной из распространенных моделей мышечной вязкости является демпфер экспоненциальной формы, где

добавляется к глобальному уравнению модели, чье и являются константами. [ 2 ]

См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ Хилл, А.В. (октябрь 1938 г.). «Тепло сокращения и константы динамики мышц» . Учеб. Р. Сок. Лонд. Б. 126 (843). Лондон: Королевское общество: 136–195. дои : 10.1098/rspb.1938.0050 .
- ^ Jump up to: а б с д Фунг, Ю.-К. (1993). Биомеханика: механические свойства живых тканей . Нью-Йорк: Springer-Verlag. п. 568. ИСБН 0-387-97947-6 .
- ^ Мартинс, JAC; Пирес, Э.Б.; Сальвадо, Р.; Динис, ПБ (1998). «Численная модель пассивного и активного поведения скелетных мышц». Компьютерные методы в прикладной механике и технике . 151 (3–4). Эльзевир: 419–433. Бибкод : 1998CMAME.151..419M . дои : 10.1016/S0045-7825(97)00162-X .
- ^ Панди, Маркус Г.; Заяц, Феликс Э.; Сим, Ынсуп; Левин, Уильям С. (1 января 1990 г.). «Оптимальная модель управления прыжками человека на максимальную высоту» . Журнал биомеханики . 23 (12): 1185–1198. дои : 10.1016/0021-9290(90)90376-E . ISSN 0021-9290 . ПМИД 2292598 .
- ^ Мартинс, JAC; Пато, MPM; Пирес, Э.Б. (1 сентября 2006 г.). «Конечно-элементная модель скелетных мышц» . Виртуальное и физическое прототипирование . 1 (3): 159–170. дои : 10.1080/17452750601040626 . ISSN 1745-2759 . S2CID 137665181 .