Бистатический гидролокатор
Бистатический гидролокатор — это конфигурация гидролокатора , в которой передатчик и приемник разделены расстоянием, достаточно большим, чтобы быть сравнимым с расстоянием до цели. Большинство гидроакустических систем являются моностатическими , то есть передатчик и приемник расположены в одном месте. Конфигурация с несколькими приемниками называется мультистатической .
Бистатический против моностатического
[ редактировать ]Потери при распространении (передаче)
[ редактировать ]Это потеря уровня звука, которая происходит, когда звуковой импульс проходит от проектора к цели и от цели к приемнику. Существует три различных механизма, вызывающих потери передачи : сферическое (или цилиндрическое на мелководье) распространение, поглощение и рассеяние неоднородностями океанской среды. Потери при передаче (TL) пропорциональны дальности (чем дальше распространяется звук, тем больше потери) и частоте звука. В моностатическом гидролокаторе звук сначала распространяется от проектора к цели, а затем таким же образом обратно от цели к приемнику, поэтому двусторонние потери составляют всего 2TL, где TL — это односторонние потери.В бистатическом гидролокаторе общие потери (в децибелах) представляют собой сумму TL pt (от проектора до цели) и TL tr (от цели до приемника).

Мертвая зона
[ редактировать ]В моностатическом эхолоте первое, что слышит приемник, — это звук передаваемого сигнала. Уровень этого звука очень высок, и обнаружить эхо во время эхо-сигнала τ невозможно. Это означает, что цели невозможно обнаружить в пределах круга радиуса Cτ/2, где C — скорость звука в воде. Эту зону обычно называют «мертвой зоной». Если гидролокатор находится близко к поверхности, дну или к тому и другому (что может произойти на мелководье), мертвая зона может быть больше, чем Cτ/2 из-за высокого уровня реверберации.
В бистатическом гидролокаторе расстояние перемещения от проектора до цели и от цели до приемника составляет R = R pt + R tr . Поскольку проектор отделен от приемника расстоянием R pr , первые R pr /C секунд после начала опроса, приемник просто ждет. По истечении этого времени он получает прямой сигнал от проектора (часто называемый «прямым сигналом»). [1] ), который длится τ секунд. Таким образом, гидролокатор не может обнаружить цели внутри эллипса R = Rpr + Cτ, как показано на рисунке. Реверберация высокого уровня в зоне проектора не влияет на мертвую зону.
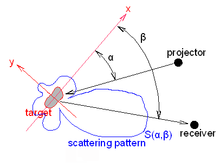
Схема рассеяния цели
[ редактировать ]Мишени не отражают звук во всех направлениях. Механизм отражения звука (или рассеяния мишенью) сложен, поскольку мишень — это не просто твердый шар. Уровень рассеянного звука зависит от угла β, под которым цель озвучивается проектором, а также зависит от угла направления рассеяния α (см. локальные оси цели Z{x,y}). Эти углы часто называют аспектами. Эта функция уровня рассеянного звука в зависимости от (α, β) называется картиной рассеяния S(α, β). Направление максимального эха (максимум S(α, β)) также зависит от формы и внутренней структуры цели. Поэтому иногда лучший аспект озвучивания — это не то же самое, что лучший аспект приема.
Это приводит к бистатическому решению. Рассеивание цели становится еще более сложным, если цель заглублена (или полузасыпана) в донные отложения. (Это происходит с морскими минами, контейнерами с мусором, затонувшими кораблями и т. д.) В этом случае на механизм рассеяния влияют не только особенности цели, но и взаимодействие звуковых волн между целью и окружающим дном.
Конкретные классы бистатических гидролокаторов
[ редактировать ]Обратное и прямое рассеяние
[ редактировать ] |  |  |
В моностатическом гидролокаторе приемник слушает эхо, которое отражается (рассеивается) прямо от цели.Бистатический гидролокатор может работать двумя способами: используя либо обратное, либо прямое рассеяние цели. Бистатический гидролокатор обратного рассеяния - это гидролокатор, в котором бистатический угол φ составляет менее 90 °. Рассеяние вперед — это физическое явление, основанное на принципе Бабине . Бистатический гидролокатор прямого рассеяния — это гидролокатор, в котором бистатический угол φ превышает 90 °.
Псевдомоностатический гидролокатор
[ редактировать ]Это гидролокатор с малым бистатическим углом. Другими словами, как расстояние от проектора до цели R pt, так и от цели до приемника R tr намного больше, чем расстояние от проектора до приемника R pr .
Мультистатический эхолот
[ редактировать ]Это многоузловая система с более чем одним проектором, приемником или тем и другим.
Приложения
[ редактировать ] |  |  |  |
Наблюдение на большом расстоянии
[ редактировать ]Для прибрежного наблюдения большую группу приемных гидрофонов обычно размещают недалеко от берега и подключают кабелями к наземному центру обработки данных. Для обнаружения целей на большом расстоянии (вдали от берега) можно использовать мощный мобильный проектор, развертываемый с корабля. В системе такого типа используется идея «приблизить проектор к интересующей области и снизить потери при передаче».
Наблюдение за большой территорией с помощью одного проектора и сети приемников
[ редактировать ]Система этого типа является мультистатической. В нем используется идея «покрыть интересующую область разреженной сетью приемников и озонировать всю область с помощью мощного проектора». Приемными узлами могут быть гидроакустические буи (с радиосвязью с центром обработки) или автономные подводные аппараты (АНПА) с акустической линией связи. [2] Примером является проект GOATS, [3] использование АНПА в качестве приемных узлов.
Низкочастотный буксируемый гидролокатор
[ редактировать ]Чем ниже частота, тем меньше потери при передаче поглощают и рассеивают компоненты. С другой стороны, чем ниже частота, тем больше размер направленного проектора и приемной решетки. Таким образом, развертываемый на корабле гидролокатор дальнего действия представляет собой низкочастотный бистатический гидролокатор с буксируемой решеткой с пространственно разделенными проектором и приемной решеткой. Примером может служить буксируемый гидролокатор LFATS. [4]
Обнаружение скрытых предметов
[ редактировать ]Чтобы обнаружить закопанный объект, передающий сигнал должен проникнуть на дно. Для этого требуется мощный и узконаправленный проектор. Затем направленный приемник следует разместить в точке, где отражение «цель + окружающее дно» является наилучшим. Это бистатическая система. Примером является проект SITAR, [5] разработан для поиска таких объектов, как контейнеры с токсичными отходами и мины.
К основным преимуществам бистатического и мультистатического сонара относятся: [ нужна ссылка ]
- Снижение затрат на приобретение и обслуживание (при использовании передатчика стороннего производителя)
- Работа без разрешения частоты (при использовании передатчика стороннего производителя)
- Скрытая работа приемника
- Повышенная устойчивость к электронным противодействиям, поскольку используемая форма сигнала и местоположение приемника потенциально неизвестны.
- Возможное увеличение радиолокационной заметности цели из-за геометрических эффектов.
К основным недостаткам бистатических и мультистатических гидролокаторов относятся: [ нужна ссылка ]
- Сложность системы
- Затраты на обеспечение связи между площадками
- Отсутствие контроля над передатчиком (при использовании стороннего передатчика)
- Сложнее развернуть
- Сокращение зоны покрытия низкого уровня из-за необходимости обеспечения прямой видимости из нескольких мест.
См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ Кокс Х. Основы бистатического активного сонара. В: «Обработка подводных акустических данных», Ю. Т. Чан (редактор). Спрингер, 1989 г.
- ^ Сяолун Ю. Проводная качественная беспроводная связь с использованием высокоскоростных акустических модемов. MTS/IEEE Oceans 2000 , Том 1, стр. 417–422.
- ^ Те-Чи Луи, Шмидт Х. Обнаружение и отслеживание целей на морском дне с помощью АНПА. MTS/IEEE Oceans 2002 , Том 1, стр. 474–478.
- ^ ПК Сенгупта. Конкурентные преимущества LFATS для подводной войны на мелководье. FORCE, июнь 2005 г., стр. 8–10.
- ^ М. Кошки, А. Каити, П. Блондель и Н. Жасундре. Потенциальный алгоритм классификации целей в бистатических геометриях гидролокаторов. В: «Граничные влияния в высокочастотной акустике мелкой воды», Н.Г. Пейдж и П. Блондель (редакторы), Университет Бата, Великобритания, 2005 г.
Источники
[ редактировать ]- Объяснение бистатического сонара. Александр Якубовский, FarSounder Inc.. Архивировано 10 июля 2011 г. в Wayback Machine.
Дальнейшее чтение
[ редактировать ]- Н.К. Налуаи и др. Бистатическое применение обработки интенсивности. Журнал Акустического общества Америки, 2007, 121 (4), стр. 1909–1915.
- Дж. Р. Эдвардс, Х. Шмидт и К. ЛеПейдж, «Обнаружение и визуализация целей с бистатической синтетической апертурой с помощью AUV», IEEE Journal of Oceanic Engineering, 2001, 26 (4): стр. 690–699.
- И. Люцифреди и Х. Шмидт. Докритическое рассеяние на скрытых упругих оболочках. Журнал Акустического общества Америки, 2006 г., 120 (6), стр. 3566–3583, 2006 г.
- Низкочастотный буксируемый гидролокатор Captas Nano. www.thalesgroup.com/naval
- Дж. И. Боуэн и Р. В. Митник. Методика мультистатического прогнозирования производительности. Технический дайджест Johns Hopkins APL, 1999, т.2, № 3, стр. 424–431.
