Модель камеры-обскуры
Эта статья включает список общих ссылок , но в ней отсутствуют достаточные соответствующие встроенные цитаты . ( февраль 2008 г. ) |
Модель камеры-обскуры описывает математическую связь между координатами точки в трехмерном пространстве и ее проекцией на плоскость изображения идеальной камеры-обскуры , где апертура камеры описывается как точка и для фокусировки света не используются линзы. Модель не учитывает, например, геометрические искажения или размытие несфокусированных объектов, вызванные линзами и апертурами конечного размера. [ 1 ] Также не учитывается, что большинство практичных камер имеют только дискретные координаты изображения. Это означает, что модель камеры-обскуры можно использовать только в качестве аппроксимации первого порядка преобразования трехмерной сцены в двухмерное изображение . Его достоверность зависит от качества камеры и, как правило, уменьшается от центра изображения к краям по мере увеличения эффекта искажения объектива.
Некоторые эффекты, которые не учитывает модель камеры-обскуры, можно компенсировать, например, путем применения подходящих преобразований координат к координатам изображения; другие эффекты достаточно малы, чтобы ими можно было пренебречь, если используется высококачественная камера. Это означает, что модель камеры-обскуры часто можно использовать в качестве разумного описания того, как камера отображает трехмерную сцену, например, в компьютерном зрении и компьютерной графике .
Геометрия
[ редактировать ]
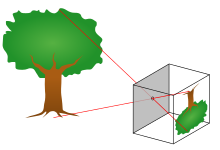
Геометрия , связанная с отображением камеры-обскуры, показана на рисунке. На рисунке присутствуют следующие основные объекты:
- Трехмерная ортогональная система координат с началом в O . Здесь же апертура камеры находится . Три оси системы координат обозначаются как X1, X2, X3. Ось X3 указывает в направлении обзора камеры и называется оптической осью , главной осью или главным лучом . Плоскость, охватываемая осями X1 и X2, является передней стороной камеры или главной плоскостью .
- Плоскость изображения, в которой трехмерный мир проецируется через апертуру камеры. Плоскость изображения параллельна осям X1 и X2 и расположена на расстоянии от начала координат О в отрицательном направлении оси X3, где f — фокусное расстояние камеры-обскуры. Практическая реализация камеры-обскуры подразумевает, что плоскость изображения расположена так, что она пересекает ось X3 в координате -f , где f > 0 .
- Точка R на пересечении оптической оси и плоскости изображения. Эту точку называют главной точкой [ 2 ] или центр изображения .
- Точка P где-то в мире по координате относительно осей X1, X2 и X3.
- Линия проекции точки P на камеру. Это зеленая линия, проходящая через точку и точку O. P
- Проекция точки P на плоскость изображения Q. обозначается Эта точка определяется пересечением линии проекции (зеленой) и плоскости изображения. В любой практической ситуации можно предположить, что > 0, что означает, что точка пересечения четко определена.
- В плоскости изображения также имеется двумерная система координат с началом координат в R и осями Y1 и Y2, параллельными X1 и X2 соответственно. Координаты точки Q относительно этой системы координат равны .




Апертура - обскура камеры, через которую должны пройти все проекционные линии, предполагается бесконечно малой, точкой. В литературе эту точку в трехмерном пространстве называют оптическим центром (или центром линзы или камеры) . [ 3 ]
Формулировка
[ редактировать ]Далее мы хотим понять, как координаты точки Q зависят от координат точки П. Это можно сделать с помощью следующего рисунка, на котором показана та же сцена, что и на предыдущем рисунке, но теперь сверху, если смотреть вниз в отрицательном направлении оси X2.

На этом рисунке мы видим два подобных треугольника , у обоих части линии проекции (зеленые) являются гипотенузами . Катеты левого треугольника и f и катеты прямоугольного треугольника равны и . Поскольку оба треугольника подобны, отсюда следует, что


- или


Аналогичное исследование, если смотреть в отрицательном направлении оси X1, дает
- или


Это можно резюмировать как

это выражение, описывающее связь между трехмерными координатами точки P и координат ее изображения заданной точкой Q в плоскости изображения.
Повернутое изображение и плоскость виртуального изображения
[ редактировать ]Преобразование 3D-координат в 2D, описываемое камерой-обскурой, представляет собой перспективную проекцию с последующим поворотом на 180° плоскости изображения. Это соответствует тому, как работает настоящая камера-обскура; полученное изображение поворачивается на 180°, и относительный размер проецируемых объектов зависит от их расстояния до фокальной точки, а общий размер изображения зависит от расстояния f между плоскостью изображения и фокальной точкой. Чтобы создать неповернутое изображение, чего мы и ожидаем от камеры, есть две возможности:
- Поверните систему координат в плоскости изображения на 180° (в любую сторону). Именно так любая практическая реализация камеры-обскуры могла бы решить проблему; в фотокамере мы поворачиваем изображение перед тем, как на него посмотреть, а в цифровой камере мы считываем пиксели в таком порядке, что оно поворачивается.
- Поместите плоскость изображения так, чтобы она пересекала ось X3 в точке f, а не в точке -f, и переработайте предыдущие расчеты. Это создаст виртуальную (или фронтальную) плоскость изображения , которую невозможно реализовать на практике, но которая обеспечивает теоретическую камеру, которую может быть проще анализировать, чем реальную.
В обоих случаях результирующее сопоставление 3D-координат с координатами 2D-изображения задается выражением выше, но без отрицания, таким образом

В однородных координатах
[ редактировать ]Отображение трехмерных координат точек пространства в координаты двумерного изображения также может быть представлено в однородных координатах . Позволять — представление трехмерной точки в однородных координатах (четырехмерный вектор), и пусть быть представлением изображения этой точки в камере-обскуре (трехмерный вектор). Тогда имеет место следующее соотношение



где это матрица камеры и означает равенство между элементами проективных пространств . Это означает, что левая и правая части равны с точностью до ненулевого скалярного умножения. Следствием этого отношения является то, что также можно рассматривать как элемент проективного пространства ; две матрицы камеры эквивалентны, если они равны с точностью до скалярного умножения. Это описание отображения камеры-обскуры как линейного преобразования вместо доли двух линейных выражений позволяет упростить многие выводы отношений между трехмерными и двумерными координатами. [ нужна ссылка ]



См. также
[ редактировать ]- Резекция камеры
- Уравнение коллинеарности
- Входной зрачок — эквивалентное расположение точечного отверстия по отношению к пространству объекта в реальной камере.
- Выходной зрачок — эквивалентное расположение точечного отверстия относительно плоскости изображения в реальной камере.
- Ибн аль-Хайсам
- Камера-обскура , практическая реализация математической модели, описанная в этой статье.
- Прямолинейная линза
Ссылки
[ редактировать ]Эта статья нуждается в дополнительных цитатах для проверки . ( январь 2008 г. ) |
- ^ Селиски, Ричард (2022). Компьютерное зрение: алгоритмы и приложения (2-е изд.). Спрингер Природа. п. 74. ИСБН 3030343723 . Проверено 30 декабря 2023 г.
- ^ Карло Томази (9 августа 2016 г.). «Простая модель камеры» (PDF) . cs.duke.edu . Проверено 18 февраля 2021 г.
- ^ Андреа Фузиелло (27 декабря 2005 г.). «Элементы геометрического компьютерного зрения» . Homepages.inf.ed.ac.uk . Проверено 18 декабря 2013 г.
Библиография
[ редактировать ]- Дэвид А. Форсайт и Жан Понсе (2003). Компьютерное зрение: современный подход . Прентис Холл. ISBN 0-12-379777-2 .
- Ричард Хартли и Эндрю Зиссерман (2003). Множественная геометрия в компьютерном зрении . Издательство Кембриджского университета. ISBN 0-521-54051-8 .
- Бернд Йене (1997). Практическое руководство по обработке изображений для научных приложений . ЦРК Пресс. ISBN 0-8493-8906-2 .
- Линда Г. Шапиро и Джордж К. Стокман (2001). Компьютерное зрение . Прентис Холл. ISBN 0-13-030796-3 .
- Ган Сюй и Чжэнъю Чжан (1996). Эпиполярная геометрия в стерео, движении и распознавании объектов . Академическое издательство Клувер. ISBN 0-7923-4199-6 .
- Селиски, Ричард (2022). Компьютерное зрение: алгоритмы и приложения (2-е изд.). Спрингер Природа. п. 925. ИСБН 3030343723 . Проверено 30 декабря 2023 г.