Транзит (спутник)
Транзит 2А с GRAB 1 наверху во время подготовки к запуску | |
| Страна/страны происхождения | Соединенные Штаты |
|---|---|
| Статус | Пенсионер (1996) |
| Размер созвездия | |
| Первый запуск | 1959 |
| Последний запуск | 1988 |
Система Transit , также известная как NAVSAT или NNSS (от навигационной спутниковой системы ВМФ ), была первой спутниковой навигационной системой , которая использовалась в оперативном режиме. Радионавигационная подводным лодкам с система в основном использовалась ВМС США для предоставления точной информации о местоположении «Поларис» баллистическими ракетами ВМФ , а также в качестве навигационной системы на надводных кораблях , а также для гидрографических и геодезических изысканий . С 1964 года Transit обеспечивал непрерывную спутниковую навигационную службу сначала для подводных лодок Polaris, а затем и для гражданского использования. В рамках программы Project DAMP корабль слежения за ракетами USAS American Mariner также использовал данные со спутника для получения точной информации о местонахождении корабля перед позиционированием своих радаров слежения.
История
[ редактировать ]Спутниковая система Transit, спонсируемая ВМФ и разработанная совместно DARPA Джона Хопкинса и Лабораторией прикладной физики под руководством доктора Ричарда Кершнера из Университета Джонса Хопкинса, была первой спутниковой системой геопозиционирования. [1] [2] [3] Всего через несколько дней после Советским Союзом запуска «Спутника-1» , первого искусственного спутника Земли, 4 октября 1957 года, два физика из APL, Уильям Гайер и Джордж Вайффенбах, оказались в дискуссии о радиосигналах, которые, вероятно, будут исходить от спутник. Им удалось определить орбиту спутника, проанализировав доплеровский сдвиг его радиосигналов за один проход . [4] Обсуждая дальнейшие пути своих исследований, их директор Фрэнк МакКлюр, председатель Исследовательского центра APL, в марте 1958 года предположил, что, если бы положение спутника было известно и предсказуемо, доплеровский сдвиг можно было бы использовать для определения местоположения приемника на Земле, и предложил спутниковая система для реализации этого принципа. [5]
Разработка системы «Транзит» началась в 1958 году, а прототип спутника « Транзит 1А » был запущен в сентябре 1959 года. [6] Этот спутник не смог достичь орбиты. [7] Второй спутник, «Транзит 1В» , был успешно запущен 13 апреля 1960 года ракетой «Тор-Аблестар» . [8] Первые успешные испытания системы были проведены в 1960 году, а на вооружение ВМФ система поступила в 1964 году. Полностью работоспособная группировка из 36 спутников была создана в 1968 году. [9]
Ракета Chance Vought/LTV Scout была выбрана в качестве специальной ракеты-носителя для программы, поскольку она доставляла полезную нагрузку на орбиту по самой низкой цене за фунт. Однако решение Scout наложило два конструктивных ограничения. Во-первых, вес более ранних спутников составлял около 300 фунтов (140 кг) каждый, но мощность вывода Scout на транзитную орбиту составляла около 120 фунтов (54 кг), что позже было значительно увеличено. Необходимо было добиться уменьшения массы спутника, несмотря на потребность в большей мощности, чем ранее APL рассчитывала на спутник. Вторая проблема касалась повышенной вибрации, которая воздействовала на полезную нагрузку при запуске, поскольку на «Скауте» использовались твердотопливные ракетные двигатели. Таким образом, необходимо было создать электронное оборудование, которое было бы меньшим, чем раньше, и достаточно прочным, чтобы выдерживать повышенную вибрацию при запуске.Выполнить новые требования оказалось труднее, чем ожидалось, но это удалось. Первый прототип действующего спутника («Транзит 5А-1») был выведен на полярную орбиту ракетой «Скаут» 18 декабря 1962 года.Спутник проверил новую технику развертывания солнечных панелей и отделения от ракеты, но в остальном она не увенчалась успехом из-за проблем с энергосистемой. Транзит 5А-2, запущенный 5 апреля 1963 года, не смог выйти на орбиту. Транзит 5А-3 с модернизированным источником питания был запущен 15 июня 1963 года. Во время полета с двигателем произошел сбой в памяти, из-за которого она не могла принимать и сохранять навигационное сообщение, а стабильность генератора во время запуска ухудшилась. Таким образом, 5А-3 не могла использоваться для навигации. Однако этот спутник был первым, достигшим Гравитационно-градиентная стабилизация и другие ее подсистемы показали себя хорошо. [10]
Геодезисты использовали Transit для определения удаленных контрольных точек путем усреднения десятков точек Transit, обеспечивая точность менее метра. [11] Фактически, высота Эвереста была скорректирована в конце 1980-х годов с помощью приемника Transit для повторного обследования близлежащего ориентира. [12]
Тысячи военных кораблей, грузовых судов и частных плавсредств использовали Транзит с 1967 по 1991 год. В 1970-х годах Советский Союз начал запускать собственную спутниковую навигационную систему «Парус » (военная) / «Цикада» (гражданская), которая используется до сих пор, помимо ГЛОНАСС следующего поколения. . [13] Некоторые советские военные корабли были оснащены приёмниками Motorola NavSat. [14]
Транзитная система устарела из-за системы глобального позиционирования (GPS) и прекратила навигационное обслуживание в 1996 году. Улучшения в электронике позволили GPS-приемникам эффективно принимать несколько координат одновременно, что значительно снизило сложность определения местоположения. GPS использует гораздо больше спутников, чем использовалось с Transit, что позволяет использовать систему непрерывно, в то время как Transit обеспечивал определение местоположения только каждый час или чаще.
После 1996 года спутники продолжали использоваться в системе мониторинга ионосферы ВМФ (NIMS). [15]
Описание
[ редактировать ]
Спутники
[ редактировать ]Спутники (известные как спутники OSCAR или NOVA ), используемые в системе, были размещены на низких полярных орбитах на высоте около 600 морских миль (690 миль; 1100 км) с орбитальным периодом около 106 минут. спутников . Для обеспечения достаточного глобального покрытия требовалась группировка из пяти Пока система работала, на орбите обычно находились не менее десяти спутников – по одному запасному на каждый спутник в основной группировке. Обратите внимание, что эти спутники OSCAR не были такими же, как спутники серии OSCAR , которые предназначались для использования радиолюбителями для использования в спутниковой связи .
Орбиты спутников «Транзит» были выбраны так, чтобы охватить всю Землю; они пересекли полюса и разошлись по экватору. Поскольку в любой момент времени обычно был виден только один спутник, исправления можно было производить только тогда, когда один из спутников находился над горизонтом. На экваторе эта задержка между исправлениями составляла несколько часов; в средних широтах задержка сократилась до часа-двух. Для своей предполагаемой роли в качестве системы обновления для запуска БРПЛ Transit было достаточно, поскольку подводные лодки периодически вносили исправления для сброса своей инерциальной системы наведения , но Transit не имел возможности обеспечивать высокоскоростные измерения положения в реальном времени.
С более поздними улучшениями система обеспечила точность за один проход примерно 200 метров (660 футов), а также синхронизацию времени примерно до 50 микросекунд. Транзитные спутники также передают зашифрованные сообщения, хотя это и второстепенная функция. [ нужна ссылка ]
Спутники «Транзит» использовали массивы памяти на магнитных сердечниках в качестве хранилища данных объемом до 32 килобайт. [16]
Определение местоположения на местности
[ редактировать ]Определение местоположения, также известное как «фиксация местоположения», обычно требует проведения двух или более измерений для получения двухмерного местоположения. В случае современной системы GPS можно провести десятки таких измерений в зависимости от того, какие спутники видны в данный момент, и каждое из них помогает повысить точность. В случае с Транзитом лишь небольшое количество спутников находилось на орбите и было разбросано. Обычно это означало, что в любой момент времени был виден только один спутник. Требовался какой-то другой метод определения второго измерения.
Transit сделал это, измерив доплеровский сдвиг сигнала. Космический корабль двигался со скоростью около 17 000 миль в час (27 000 км/ч), что могло увеличивать или уменьшать частоту принимаемого несущего сигнала на целых 10 кГц, измеренную на земле. Пока спутник приближается к наземной станции, его сигналы будут смещаться вверх по частоте, а по мере удаления — снова вниз. Точный момент, когда частота точно равна частоте вещания, - это когда наземная траектория спутника проходит местоположение наземного местоположения (с некоторыми поправками). Это обеспечивает одно из двух необходимых измерений.
Для второй меры необходимо учитывать характер доплеровского сдвига. Если спутник проходит прямо над головой, его угловая скорость при прохождении будет больше, чем при прохождении в одну сторону. В крайнем случае, когда спутник находится вблизи горизонта, изменение относительной скорости сведено к минимуму. Таким образом, быстрота изменения частоты является показателем относительной долготы между станцией и спутником. Кроме того, вращение Земли обеспечило еще одну доплеровскую поправку, которую можно было использовать для определения того, находился ли спутник к востоку или западу от наземной станции.
Эти измерения определяют относительное местоположение по сравнению со спутником. Чтобы определить фактическое местоположение, эта относительная мера применяется к местоположению спутника. спутника Это обеспечивается путем периодической рассылки точных данных о времени (каждые две минуты), а также шести элементов орбиты и возмущения переменных орбиты. Наземный приемник загрузил эти сигналы и рассчитал местоположение спутника, пока измерял смещения. орбиты Эфемериды и поправки часов загружались дважды в день на каждый спутник с одной из четырех станций слежения и ввода данных ВМФ.
Спутник «Транзит» вещает на частотах 150 и 400 МГц. Эти две частоты использовались, чтобы компенсировать преломление спутниковых радиосигналов ионосферой, тем самым повышая точность определения местоположения. Система Transit также предоставила первую в мире услугу хронометража, позволяющую синхронизировать часы повсюду с точностью до 50 микросекунд.
Вычисление наиболее вероятного местоположения приемника оказалось нетривиальной задачей. Навигационное программное обеспечение использовало движение спутника для расчета «пробной» доплеровской кривой на основе исходного «пробного» местоположения приемника. Затем программное обеспечение будет выполнять аппроксимацию кривой методом наименьших квадратов для каждого двухминутного участка доплеровской кривой, рекурсивно перемещая пробное положение до тех пор, пока пробная доплеровская кривая «наиболее близко» не будет соответствовать фактическому доплеровскому показателю, полученному со спутника для всех двухминутных сегментов кривой. .
Если бы приемник также перемещался относительно Земли, например, на борту корабля или самолета, это могло бы вызвать несоответствие идеализированным доплеровским кривым и ухудшить точность определения местоположения. Однако точность позиционирования обычно можно вычислить с точностью до 100 метров для медленно движущегося корабля, даже при приеме всего одной двухминутной доплеровской кривой. Это был навигационный критерий, требуемый ВМС США, поскольку американские подводные лодки обычно выставляли свою УВЧ-антенну всего на 2 минуты, чтобы получить пригодную для использования точку транзита. Американская подводная версия системы Transit также включала специальную зашифрованную, более точную версию загруженных орбитальных данных спутника. [ нужна ссылка ] Эти расширенные данные позволили значительно повысить точность системы [в отличие от выборочной доступности (SA) в GPS). В этом расширенном режиме точность обычно составляла менее 20 метров, то есть точность находилась между точностью LORAN C и GPS. Конечно, Transit была самой точной навигационной системой своего времени.
Основной принцип работы Transit аналогичен системе, используемой аварийными приводными передатчиками (ELT), за исключением того, что в последнем случае передатчик находится на земле, а приемник - на орбите. ELT измеряют доплеровский сдвиг передатчика на лодке или самолете, когда он проходит над головой, и передают эти данные на землю, где можно определить местоположение корабля.
Определение спутниковых орбит
[ редактировать ]Сеть наземных станций, местоположение которых было точно известно, постоянно отслеживала спутники «Транзит». Они измерили доплеровский сдвиг и перенесли данные на бумажную ленту с 5 отверстиями. Эти данные были отправлены в Центр управления спутниками Лаборатории прикладной физики в Лореле, штат Мэриленд, с использованием коммерческих и военных телетайпных сетей. Данные со стационарных наземных станций предоставили информацию о местоположении на орбите спутника «Транзит». Обнаружение транзитного спутника на земной орбите с известной наземной станции с использованием доплеровского сдвига — это просто обратная процедура использования известного местоположения спутника на орбите для определения местоположения неизвестного местоположения на Земле, опять же с использованием доплеровского сдвига.
Типичная наземная станция занимала небольшую хижину Квонсета . Точность измерений наземной станции зависела от точности главных часов наземной станции. кварцевый генератор в печи Первоначально в качестве главных часов использовался с регулируемой температурой. Главные часы ежедневно проверялись на предмет дрейфа с помощью ОНЧ-приемника, настроенного на ОНЧ-станцию ВМС США. Сигнал ОНЧ обладал тем свойством, что фаза сигнала ОНЧ не менялась изо дня в день в полдень на пути между передатчиком и приемником, и, таким образом, его можно было использовать для измерения дрейфа генератора. Позже из рубидия и цезия стали использоваться лучевые часы . Наземные станции имели номерные названия; например, станция 019 — это станция Мак-Мердо в Антарктиде. В течение многих лет, в течение 1970-х годов, на этой станции работали аспиранты и студенты, обычно электротехники, из Техасского университета в Остине. Другие станции были расположены в Университете штата Нью-Мексико, Техасском университете в Остине, на Сицилии, в Японии, на острове Сейшельские острова, в Туле, Гренландия и в ряде других мест. Станции Гренландии и Антарктиды видели каждый проход каждого транзитного спутника из-за их близкого к полюсу расположения этих спутников на полярной орбите.
 Транзитная 3-А
Транзитная 3-А Транзитная 5-А
Транзитная 5-А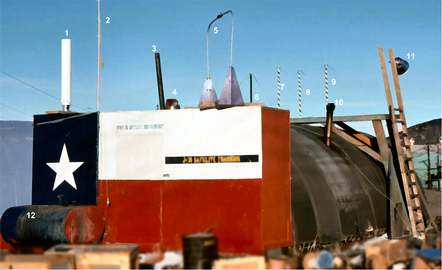 Вестибюль и хижина Quonset Транзитная станция спутникового слежения 019. 1. Триада спутникового магнитометра с нижней нагрузочной антенной. 2. Флагшток, 3. Монтажный столб на заднем плане, 4 Вращающийся световой сигнализатор температуры, 5 ОНЧ-антенна, 6–9 Доплеровские антенны спутникового слежения, 10. Печная труба для обогревателя, 11 Прожектор для условий плохой видимости, 12 Топливный бак.
Вестибюль и хижина Quonset Транзитная станция спутникового слежения 019. 1. Триада спутникового магнитометра с нижней нагрузочной антенной. 2. Флагшток, 3. Монтажный столб на заднем плане, 4 Вращающийся световой сигнализатор температуры, 5 ОНЧ-антенна, 6–9 Доплеровские антенны спутникового слежения, 10. Печная труба для обогревателя, 11 Прожектор для условий плохой видимости, 12 Топливный бак.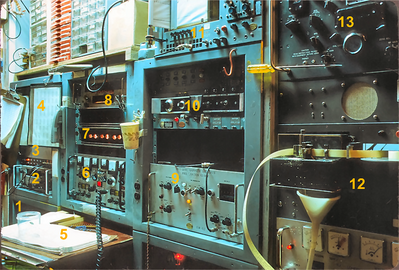 Некоторое оборудование внутри станции спутникового слежения «Транзит» 019. 1. Блок автоматического управления, 2. таймер-счетчик, 3. Детектор временных пакетов, 4. Таблица преобразования времени, 5. Спутниковые эфемериды, 6. Приемник слежения, 7. Отображение времени, 8. Программатор Header-Tailer, 9. Дигитайзер и основной тактовый генератор, 10. Задающий генератор, 11. Ленточный самописец, 12. Перфоратор для бумажной ленты, 13. Коротковолновый приемник. Вне поля зрения: ОНЧ-приемник, блок коррекции рефракции, система резервных батарей, блоки питания, стабилизаторы переменного напряжения.
Некоторое оборудование внутри станции спутникового слежения «Транзит» 019. 1. Блок автоматического управления, 2. таймер-счетчик, 3. Детектор временных пакетов, 4. Таблица преобразования времени, 5. Спутниковые эфемериды, 6. Приемник слежения, 7. Отображение времени, 8. Программатор Header-Tailer, 9. Дигитайзер и основной тактовый генератор, 10. Задающий генератор, 11. Ленточный самописец, 12. Перфоратор для бумажной ленты, 13. Коротковолновый приемник. Вне поля зрения: ОНЧ-приемник, блок коррекции рефракции, система резервных батарей, блоки питания, стабилизаторы переменного напряжения.




Портативный геосивер
[ редактировать ]Портативная версия наземной станции называлась «Геосивер» и использовалась для полевых измерений. Этот приемник, источник питания, блок перфоленты и антенны могли поместиться в несколько мягких алюминиевых кейсов и перевозиться в качестве дополнительного груза авиакомпанией. Данные собирались за определенный период времени, обычно за неделю, и отправлялись обратно в Центр управления спутниками для обработки. Поэтому, в отличие от GPS, не было немедленного точного определения местоположения геосивера. Геосивер постоянно находился на Южнополярной станции и управлялся персоналом Геологической службы США. Поскольку он располагался на поверхности движущегося ледникового покрова, его данные использовались для измерения движения ледяного покрова. Другие геосиверы были вывезены в полевые условия Антарктиды летом и использовались для измерения местоположения, например, движения шельфового ледника Росса .
Компьютер АН/УИК-1 (TRW-130)
[ редактировать ]
Этот раздел в значительной степени или полностью опирается на один источник . ( Август 2015 г. ) |
Поскольку в 1958 году не существовало компьютера, достаточно маленького, чтобы поместиться в люк подводной лодки, был разработан новый компьютер, получивший название AN/UYK-1 (TRW-130). [17] Он был построен с закругленными углами, чтобы пройти через люк, имел высоту около пяти футов и был герметичен, чтобы быть водонепроницаемым. Главным инженером-конструктором был тогдашний преподаватель Калифорнийского университета в Лос-Анджелесе Лоуэлл Амдал, брат Джина Амдала . АН/УИК-1 был построен корпорацией Ramo-Wooldridge. [18] (позже TRW) для «Лафайет» ПЛАРБ класса . Он был оснащен 8192 словами 15-битной основной памяти плюс бит четности , соединенными вручную на заводе в Канога-Парке. Время цикла составляло около одной микросекунды . АН/УИК-1 весил около 550 фунтов (250 кг). [19]
AN/UYK-1 представлял собой микропрограммную машину с длиной слова 15 бит, в которой не было аппаратных команд для вычитания, умножения или деления, но которая могла складывать, сдвигать, формировать дополнение и проверять бит переноса. Инструкции по выполнению стандартных операций с фиксированной и плавающей запятой представляли собой программные подпрограммы, а программы представляли собой списки ссылок и операторов для этих подпрограмм. Например, подпрограмма «вычитание» должна была сформировать дополнение вычитаемого до единиц и сложить его. Умножение требовало последовательных сдвигов и условного сложения.
В наборе команд AN/UYK-1 инструкции машинного языка имели два оператора, которые могли одновременно манипулировать арифметическими регистрами – например, дополняя содержимое одного регистра при загрузке или сохранении другого. Возможно, это был первый компьютер, реализовавший возможность косвенной адресации за один цикл.
Во время пролета спутника приемник GE будет получать параметры орбиты и зашифрованные сообщения со спутника, а также через определенные промежутки времени измерять частоту с доплеровским сдвигом и передавать эти данные на компьютер AN / UYK-1. Компьютер также будет получать от корабельной инерциальной навигационной системы (БИНС) данные о широте и долготе. Используя эту информацию, AN/UYK-1 применил алгоритм наименьших квадратов и определил местоположение примерно за пятнадцать минут.
Другие спутники
[ редактировать ]В серии «Транзит» был 41 спутник, которому «Транзит» . НАСА присвоило название [20]
Транзит 3Б продемонстрировал загрузку программ в память бортового компьютера во время нахождения на орбите.
Транзит 4А, запущенный 29 июня 1961 года, был первым спутником, использовавшим радиоактивный источник энергии (РТГ) ( SNAP-3 ). [21] Транзит 4Б (1961 г.) также имел РТГ SNAP-3. в США «Старфиш Прайм» Транзит 4B был среди нескольких спутников, которые были случайно повреждены или уничтожены в результате ядерного взрыва, в частности, в результате высотного ядерного испытания 9 июля 1962 года и последующего радиационного пояса . [22]
«Транзит 5А3» и «Транзит 5Б-1» (1963 г.) имели SNAP-3 РТГ . [23] [24]
Транзит 5Б-2 (1963 г.) имел РТГ СНАП-9А . [25]
В 1964 году ракете «Транзит 5БН-3» с РТГ СНАП-9А не удалось вывести на орбиту. Он «сгорел при входе в атмосферу и разлетелся на мелкие частицы» вместе с примерно 1 килограммом плутония-238. [26]
Транзит 5B-5 снова возобновил связь после длительного периода бездействия ( спутник-зомби ). [27]
Транзит-9 и 5Б4 (1964 г.), а также Транзит-5Б7 и 5Б6 (1965 г.) имели «ядерный источник энергии».
ВВС США также периодически запускали недолговечные спутники, оснащенные радиомаяками 162 МГц и 324 МГц, на гораздо более низкие орбиты для изучения орбитального сопротивления . [ нужна ссылка ] Наземные станции слежения «Транзит» также отслеживали эти спутники, определяя их местонахождение на их орбитах, используя те же принципы. Данные о местоположении спутника использовались для сбора данных об орбитальном сопротивлении, включая изменения в верхних слоях атмосферы и гравитационном поле Земли.
Beacon Explorer-A и Beacon Explorer-B также имели передатчики, совместимые с Transit.
Ссылки
[ редактировать ]- ^ Хелен Э. Уорт и Мэйм Уоррен (2009). Транзит в Завтра. Пятьдесят лет космических исследований в Лаборатории прикладной физики Университета Джонса Хопкинса (PDF) . Проверено 21 января 2024 г.
- ^ Кэтрин Александров (апрель 2008 г.). «История GPS» . Архивировано из оригинала 29 июня 2011 г.
- ^ DARPA: 50 лет преодоления разрыва . Апрель 2008 г. Архивировано из оригинала 6 мая 2011 г.
- ^ Гайер и Вайфенбах (1998). «Генезис спутниковой навигации» (PDF) .
- ^ Наследие транзита: Введение приглашенного редактора Винсента Л. Писакана, Технический дайджест Johns Hopkins APL, том 19, номер 1, 1998 г. (PDF) . Архивировано из оригинала (PDF) 20 сентября 2015 г.
- ^ «Навигационная спутниковая система ВМФ» . АПЛ.
- ^ «Транзит 1A – идентификатор NSSDC: TRAN1» . Координированный архив данных НАСА по космическим наукам.
- ^ «Транзит 1B – Идентификатор NSSDC: 1960-003B» . Координированный архив данных НАСА по космическим наукам.
- ^ Вятт, Теодор (1981). «БЕРЕМЕННОСТЬ ТРАНЗИТА В ВОСПРИЯТИИ ОДНОГО УЧАСТНИКА» (PDF) . Технический дайджест Джонса Хопкинса PL . 2 (1): 33.
- ^ «Обзор развития транзита, Роберт Дж. Данчик. Технический дайджест Johns Hopkins APL, том 19, номер 1 (1998), стр. 18–26» (PDF) . Архивировано из оригинала (PDF) 21 августа 2017 г. Проверено 2 октября 2013 г.
- ^ ЭСРИ (1991). «Материалы одиннадцатой ежегодной конференции пользователей ESRI» . Одиннадцатая ежегодная конференция пользователей ESRI . 1 :523 . Проверено 23 апреля 2021 г.
- ^ Шоу, Терри (14 января 1998 г.). «Измерение горы» . Вашингтон Пост . Проверено 23 апреля 2021 г.
- ^ Энциклопедия Astronautica: Цикада. Архивировано 22 мая 2013 г. в Wayback Machine.
- ^ Макдауэлл, Джонатан (1 января 1999 г.). «Специальное издание журнала запуска 1998 года» . Космический отчет Джонатана (384) . Проверено 23 апреля 2021 г.
- ^ «Компьютерная ионосферная томография, Арнольд Дж. Такер. Технический дайджест Johns Hopkins APL, том 19, номер 1 (1998), стр. 66–71» (PDF) . Архивировано из оригинала (PDF) 20 сентября 2015 г. Проверено 30 марта 2015 г.
- ^ Рональд К. Бурек. «Твердотельные регистраторы данных NEAR» .1998.
- ^ «Документы TRW-130» . bitsavers.org .
- ^ Справочное руководство по машине AN/UYK-1 на Bitsavers
- ^ Вейк, Мартин Х. (январь 1964 г.). «TRW 230 130 АН/УИК 1» . ed-thelen.org . Четвертый обзор отечественных электронных цифровых вычислительных систем.
- ^ «Транзит – навигационная спутниковая система ВМС США (NNSS)» . Справочник эопортала . Проверено 23 августа 2019 г.
- ↑ Дэвид, Леонард «50 лет космических кораблей с ядерной установкой: все началось со транзита спутника 4A» (29 июня 2011 г.), колонка Space Insider на Space.com, получено 30 июля 2011 г.
- ^ «Транзит 4Б – Идентификатор NSSDC: 1961-031A» . Координированный архив данных НАСА по космическим наукам.
- ^ «Транзит-5А3» . Координированный архив данных НАСА по космическим наукам.
- ^ «Транзит-5Б1» . Координированный архив данных НАСА по космическим наукам.
- ^ «Транзит-5Б2» . Координированный архив данных НАСА по космическим наукам.
- ^ Харди-младший, EP; Крей, П.В.; Волчок, Х.Л. (1 января 1972 г.). «Глобальная инвентаризация и распространение плутония-238 из SNAP-9A» . Министерство энергетики США – Управление научно-технической информации . дои : 10.2172/4689831 . ОСТИ 4689831 .
- ^ «Прием мертвых спутников с помощью RTL-SDR» . 31 октября 2014 года . Проверено 30 января 2021 г.