3D-локализация звука
Трехмерная локализация звука относится к акустической технологии, которая используется для обнаружения источника звука в трехмерном пространстве . Местоположение источника обычно определяется направлением приходящих звуковых волн (горизонтальный и вертикальный углы) и расстоянием между источником и датчиками. Он включает в себя проектирование структуры датчиков и методов обработки сигналов .
Большинство млекопитающих (включая человека) используют бинауральный слух для локализации звука путем сравнения информации, полученной от каждого уха, в сложном процессе, включающем значительный объем синтеза. Трудно локализовать с помощью монофонического слуха, особенно в трехмерном пространстве .
Технология
[ редактировать ]Технология локализации звука используется в некоторых областях аудио и акустики , таких как слуховые аппараты , наблюдение. [1] и навигация . Существующие системы пассивной локализации звука в реальном времени в основном основаны на подходе разницы во времени прибытия ( TDOA ), ограничивающем локализацию звука двумерным пространством , и непрактичны в шумных условиях.
Приложения
[ редактировать ]
Приложения локализации источника звука включают разделение источника звука, отслеживание источника звука и улучшение речи. Сонар использует методы локализации источника звука для определения местоположения цели. Локализация 3D-звука также используется для эффективного взаимодействия человека и робота. С ростом спроса на роботизированный слух изучаются некоторые приложения трехмерной локализации звука, такие как человеко-машинный интерфейс, помощь инвалидам и военное применение. [2]
Подсказки для локализации звука
[ редактировать ]Подсказки локализации [3] — это функции, которые помогают локализовать звук. Сигналы локализации звука включают бинауральные и моноауральные сигналы.
- Моноауральные сигналы могут быть получены с помощью спектрального анализа и обычно используются при вертикальной локализации.
- Бинауральные сигналы генерируются разницей в слухе между левым и правым ухом. Эти различия включают межушную разницу во времени (ITD) и межушную разницу интенсивности (IID). Бинауральные сигналы используются в основном для горизонтальной локализации.
Как локализовать звук?
[ редактировать ]Первая подсказка, которую использует наш слух, — это межушная разница во времени. Звук от источника, находящегося прямо перед нами или позади нас, будет достигать обоих ушей одновременно. Если источник перемещается влево или вправо, наши уши улавливают звук от одного и того же источника, поступающий в оба уха – но с определенной задержкой. Другими словами, два уха улавливают разные фазы одного и того же сигнала. [4]
Методы
[ редактировать ]Существует множество различных методов локализации трехмерного звука. Например:
- Различные типы сенсорных структур, такие как микрофонная решетка и голова робота с бинауральным слухом. [5]
- Различные методы для достижения оптимальных результатов, такие как нейронная сеть , максимальное правдоподобие и классификация множественных сигналов (МУЗЫКА).
- Методы в реальном времени с использованием массива акустических векторных датчиков (AVS) [6]
- Методы сканирования [7]
- Офлайн-методы (по своевременности)
- Подход к микрофонной решетке
Подход с управляемым формирователем луча
[ редактировать ]В этом подходе используются восемь микрофонов в сочетании с управляемым формирователем луча, улучшенным за счет взвешенного фазового преобразования надежности (RWPHAT). Конечные результаты фильтруются через фильтр частиц , который отслеживает источники и предотвращает ложные указания.
Мотивация использования этого метода основана на предыдущих исследованиях. Этот метод используется для отслеживания и локализации нескольких источников звука, несмотря на то, что звуковое сопровождение и локализация применимы только для одного источника звука.
Локализация звука на основе Beamformer
[ редактировать ]Максимизировать выходную энергию формирователя луча с задержкой и суммированием , чтобы найти максимальное значение выходной мощности формирователя луча, управляемого во всех возможных направлениях.Используя метод взвешенного фазового преобразования по надежности (RWPHAT),Выходная энергия М-микрофонного формирователя луча с задержкой и суммой равна

Где E указывает на энергию, а K — константа, пар микрофонов — это взаимная корреляция , определяемая взвешенным по надежности фазовым преобразованием:


весовой коэффициент отражают надежность каждого частотного компонента и определяются как коэффициент усиления фильтра Винера. , где является оценкой предварительного SNR в микрофон, в временной интервал , для частоты , рассчитанный с использованием подхода, ориентированного на принятие решений. [8]






The это сигнал от микрофон и это задержка прибытия этого микрофона. Более конкретная процедура этого метода предложена Валином и Мишо. [9]



Преимущество этого метода в том, что он определяет направление звука и определяет расстояние до источников звука. Основным недостатком подхода формирования луча является несовершенство точности и возможностей локализации звука по сравнению с подходом нейронной сети, в котором используются движущиеся динамики.
Подход с использованием совмещенной микрофонной решетки
[ редактировать ]Этот метод относится к технологии локализации звука в реальном времени с использованием массива акустических векторных датчиков (AVS), который измеряет все три компонента скорости акустических частиц, а также звуковое давление, в отличие от традиционных массивов акустических датчиков , которые используют только давление. информации и задержек в распространяющемся акустическом поле. Используя эту дополнительную информацию, массивы AVS способны значительно повысить точность локализации источника.
Акустический векторный массив
[ редактировать ]
• Содержит три ортогонально расположенных датчика скорости акустических частиц (показаны в виде матрицы X, Y и Z) и один всенаправленный акустический микрофон (O).
• Обычно используется как в воздухе [10] и под водой.
• Может использоваться в сочетании с процессом автономной калибровки. [11] измерять и интерполировать импульсную характеристику массивов X, Y, Z и O, чтобы получить их управляющий вектор.
Звуковой сигнал сначала обрабатывается с помощью прямоугольного окна, затем каждый результирующий сегментный сигнал создается в виде кадра. 4 параллельных кадра обнаруживаются из массива XYZO и используются для оценки DOA. Четыре кадра разбиваются на небольшие блоки одинакового размера, затем окно Хэмминга и БПФ используются для преобразования каждого блока из временной области в частотную область. Тогда выходной сигнал этой системы представлен горизонтальным углом и вертикальным углом источников звука, который находится по пику в объединенном трехмерном пространственном спектре.
Преимущества этой решетки по сравнению с предыдущими микрофонными решетками заключаются в том, что это устройство имеет высокую производительность даже при небольшой апертуре и может одновременно локализовать несколько низкочастотных и высокочастотных широкополосных источников звука. Применение массива O может сделать более доступной акустическую информацию, такую как амплитуда и разница во времени. Самое главное, что массив XYZO имеет лучшую производительность при небольшом размере.
AVS представляет собой один из видов совмещенной матрицы из нескольких микрофонов. Он использует подход с использованием нескольких микрофонных решеток для оценки направлений звука с помощью нескольких решеток, а затем находит местоположения, используя информацию об отражении, например, где определяется направление, где пересекаются разные массивы.
Мотивация использования усовершенствованного микрофонного массива
[ редактировать ]Отражения звука всегда возникают в реальной обстановке и в микрофонных решетках. [12] не могу не наблюдать за этими размышлениями. Этот подход с использованием нескольких массивов был протестирован с использованием фиксированных массивов на потолке; эффективность сценария перемещения еще необходимо проверить.
Научимся применять множественную микрофонную решетку
[ редактировать ]Угловая неопределенность (AU) возникает при оценке направления, а неопределенность положения (PU) также увеличивается с увеличением расстояния между антенной решеткой и источником.Мы знаем, что:

Где r — расстояние между центром массива и источником, а AU — угол неопределенности.Измерения используются для определения того, пересекаются ли два направления в каком-то месте или нет.Минимальное расстояние между двумя линиями:

где и два направления, являются векторами, параллельными обнаруженному направлению, и являются позициями массивов.




Если

Две линии считаются пересечением.Когда две линии пересекаются, мы можем вычислить местоположение источника звука, используя следующее:

— оценка положения источника звука, - это позиция, в которой каждое направление пересекает линию на минимальном расстоянии, и – это взвешенные факторы. В качестве весового коэффициента , мы определили использование или от массива до линии с минимальным расстоянием.





Методы сканирования
[ редактировать ]
Методы сканирования являются мощным инструментом для локализации и визуализации стационарных во времени источников звука, поскольку они требуют использования только одного датчика и системы отслеживания положения. Одним из популярных методов достижения этой цели является использование датчика вектора акустики (AVS), также известного как 3D-зонд интенсивности звука, в сочетании с 3D-трекером.
Процедура измерения включает ручное перемещение датчика AVS вокруг источника звука, в то время как стереокамера используется для определения мгновенного положения датчика в трехмерном пространстве. Записанные сигналы затем разделяются на несколько сегментов и присваиваются набору позиций с использованием алгоритма пространственной дискретизации. Это позволяет рассчитывать векторное представление акустических изменений звукового поля, используя комбинации звукового давления и трех ортогональных скоростей акустических частиц.
Результаты анализа AVS могут быть представлены в виде трехмерного эскиза тестируемого объекта, обеспечивая визуальное представление распределения звука вокруг трехмерной сетки объекта или окружающей среды. Это может быть полезно для локализации источников звука в различных областях, таких как архитектурная акустика, контроль шума и аудиотехника, поскольку позволяет получить детальное представление о распространении звука и его взаимодействии с окружающей средой.
Метод обучения бинауральному слуху
[ редактировать ]
Обучение бинауральному слуху [5] это бионический метод. Датчик представляет собой манекен головы робота с двумя сенсорными микрофонами и искусственной ушной раковиной (отражателем). Голова робота имеет 2 оси вращения и может вращаться горизонтально и вертикально. Отражатель вызывает изменение спектра в определенную структуру входящей звуковой волны белого шума, и эта структура используется для определения вертикальной локализации. Сигналом горизонтальной локализации является ITD. Система использует процесс обучения с использованием нейронных сетей , вращая голову с устойчивым источником звука белого шума и анализируя спектр. Эксперименты показывают, что система может хорошо определять направление источника в определенном диапазоне углов прихода. Он не может идентифицировать звук, выходящий за пределы диапазона, из-за схлопывания спектра отражателя. Бинауральный слух использует только 2 микрофона и способен концентрироваться на одном источнике среди множества источников шума.
Передаточная функция, связанная с головой (HRTF)
[ редактировать ]В реальной локализации звука, помимо двух ушных раковин, функциональную роль играют голова и туловище робота. Это действует как пространственная линейная фильтрация, и фильтрация всегда количественно выражается с точки зрения передаточной функции, связанной с головой (HRTF). [14] HRTF также использует датчик головы робота, который представляет собой бинауральную модель слуха. HRTF может быть получен на основе различных признаков локализации. Локализация звука с помощью HRTF — это фильтрация входного сигнала с помощью фильтра, разработанного на основе HRTF. Вместо использования нейронных сетей используется передаточная функция, связанная с головой, а локализация основана на простом корреляционном подходе.
См. подробнее: Передаточная функция, связанная с головой .
Фазовый анализ перекрестного спектра мощности (CSP)
[ редактировать ]метод CSP [15] также используется для бинауральной модели. Идея состоит в том, что угол прихода можно определить через временную задержку прихода (TDOA) между двумя микрофонами, а TDOA можно оценить, найдя максимальные коэффициенты CSP. Коэффициенты CSP получаются по формуле:
![{\displaystyle csp_{ij}(k)={\text{IFFT}}\left\{{\frac {{\text{FFT}}[s_{i}(n)]\cdot {\text{FFT} }[s_{j}(n)]^{*}}{\left|{\text{FFT}}[s_{i}(n)]\right\vert \cdot \left|{\text{FFT} }[s_{j}(n)]\right\vert \quad }}\right\}\quad }](https://wikimedia.org/api/rest_v1/media/math/render/svg/7edeb234c5d51c97f20561585f8b3d5c55149f50)
Где и сигналы, поступающие в микрофон и соответственно
Задержка прибытия( ) тогда можно оценить по формуле:






Направление источника звука

Где скорость распространения звука, частота дискретизации и расстояние с максимальной задержкой между двумя микрофонами.



Метод CPS не требует данных об импульсном отклике системы, которые нужны HRTF. Алгоритм максимизации ожидания также используется для локализации нескольких источников звука и уменьшения ошибок локализации. Система способна идентифицировать несколько движущихся источников звука, используя всего два микрофона.
Линейный массив 2D-сенсоров
[ редактировать ]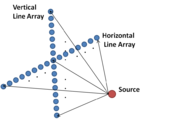
Чтобы оценить местоположение источника в трехмерном пространстве, две матрицы линейных датчиков можно разместить горизонтально и вертикально. Примером может служить двумерный линейный массив, используемый для локализации подводных источников. [16] Обрабатывая данные двух массивов методом максимального правдоподобия , можно одновременно определить направление, дальность и глубину источника. В отличие от модели бинаурального слуха, этот метод аналогичен методу спектрального анализа . Метод может быть использован для локализации удаленного источника.
Самовращающаяся двухмикрофонная матрица
[ редактировать ]Вращение массива из двух микрофонов (также называемого массивом из двух микрофонов) [17] ) приводит к синусоидальному сигналу межканальной разницы во времени (ICTD) для стационарного источника звука, присутствующего в трехмерной среде. Фазовый сдвиг результирующего синусоидального сигнала можно напрямую сопоставить с углом азимута источника звука, а амплитуду сигнала ICTD можно представить как функцию угла места источника звука и расстояния между двумя микрофонами. [18] В случае нескольких источников сигнал ICTD имеет точки данных, образующие несколько прерывистых синусоидальных сигналов. Методы машинного обучения, такие как консенсус случайных выборок (RANSAC) и пространственная кластеризация приложений с шумом на основе плотности (DBSCAN), могут применяться для определения фазовых сдвигов (сопоставление с азимутами) и амплитуд (сопоставление с возвышениями) каждой прерывистой синусоидальной формы сигнала в сигнал ИКТР. [19]
Подход иерархических нечетких искусственных нейронных сетей
[ редактировать ]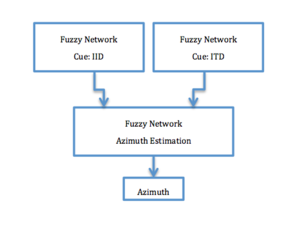
Система локализации звука в рамках подхода иерархических нечетких искусственных нейронных сетей была смоделирована на основе биологической бинауральной локализации звука. Некоторые примитивные животные с двумя ушами и маленьким мозгом могут воспринимать трехмерное пространство и обрабатывать звуки, хотя этот процесс до конца не изучен. Некоторые животные испытывают трудности с локализацией объемного звука из-за небольшого размера головы. Кроме того, длина волны коммуникационного звука может быть намного больше диаметра их головы, как в случае с лягушками .
Основываясь на предыдущих методах бинауральной локализации звука, иерархическая нечеткая система искусственных нейронных сетей сочетает в себе методы локализации звука на основе межушной разницы во времени (на основе ITD) и межушной разницы в интенсивности (на основе IID) для более высокой точности, аналогичной человеческой. Иерархические нечеткие искусственные нейронные сети [20] использовались с целью достижения такой же точности локализации звука, как и человеческие уши.
У методов локализации звука на основе IID или ITD есть основная проблема, называемая путаницей спереди и сзади. [21] В этой локализации звука, основанной на системе иерархических нейронных сетей, для решения этой проблемы оценка IID выполняется с оценкой ITD. Эта система использовалась для широкополосного звука и могла быть развернута в нестационарных сценариях.
3D-локализация звука для монофонического источника звука
[ редактировать ]Обычно локализация звука осуществляется с помощью двух (или более) микрофонов. Используя разницу времени прихода звука в два микрофона, можно математически оценить направление источника звука. Однако точность, с которой массив микрофонов может локализовать звук (с использованием межушной разницы во времени ), фундаментально ограничена физическим размером массива. Если массив слишком мал, микрофоны расположены слишком близко друг к другу, так что все они записывают по существу один и тот же звук (с ITF, близким к нулю), что чрезвычайно затрудняет оценку ориентации. Таким образом, микрофонные решетки нередко имеют длину от десятков сантиметров (для настольных приложений) до многих десятков метров (для подводной локализации). Однако микрофонные решетки такого размера становятся непрактичными для использования на небольших роботах. даже для больших роботов такие микрофонные решетки могут быть громоздкими в установке и маневрировании. Напротив, способность локализовать звук с помощью одного микрофона (который можно сделать очень маленьким) открывает потенциал для создания значительно более компактных, а также более дешевых и мощных устройств для локализации.
Традиционный подход HRTF
[ редактировать ]Общий способ реализации локализации 3D-звука — использование HRTF ( функции передачи, связанной с головой ). Сначала вычислите HRTF для трехмерной локализации звука, сформулировав два уравнения; один представляет сигнал данного источника звука, а другой указывает выходной сигнал микрофонов головы робота для звука, передаваемого от источника. Монофонические входные данные обрабатываются этими HRTF, а результаты выводятся через стереонаушники. Недостатком этого метода является то, что для реализации трехмерной локализации звука всем набором фильтров необходимо множество параметрических операций, что приводит к высокой вычислительной сложности.
DSP-реализация 3D-локализации звука
[ редактировать ]
Реализация подхода трехмерной локализации звука в реальном времени на основе DSP с использованием встроенного DSP может снизить вычислительную сложность. Как показано на рисунке, процедура реализации этого алгоритма реального времени разделена на три фазы: (i) Разделение частот, ( ii) локализация звука и (iii) сведение. В случае 3D-локализации звука для монофонического источника звука входные аудиоданные делятся на два: левый и правый каналы, и входные аудиоданные во временных рядах обрабатываются один за другим. [22]
Отличительной особенностью этого подхода является то, что слышимый диапазон частот разделен на три, так что для каждого из трех поддиапазонов можно использовать отдельную процедуру трехмерной локализации звука.
Подход с одним микрофоном
[ редактировать ]Монауральная локализация становится возможной благодаря структуре ушной раковины (наружного уха), которая изменяет звук в зависимости от угла его падения. Подход машинного обучения адаптирован для монофонической локализации с использованием только одного микрофона и «искусственной ушной раковины» (которая искажает звук в зависимости от направления). Этот подход моделирует типичное распределение естественных и искусственных звуков, а также зависящие от направления изменения звуков, вызываемых ушной раковиной. [23] Результаты экспериментов также показывают, что алгоритм способен достаточно точно локализовать широкий спектр звуков, таких как человеческая речь, лай собаки, водопад, гром и так далее. В отличие от микрофонных решеток, этот подход также предлагает возможность создания значительно более компактных, а также более дешевых и мощных устройств для локализации звука.
См. также
[ редактировать ]- 3D реконструкция звука
- Локализация акустического источника
- Бинауральная запись
- Передаточная функция, связанная с головой
- Перцептивная 3D-локализация звука
- Звуковая локализация
- Вертикальная локализация звука
Ссылки
[ редактировать ]- ^ Кейруз, Фахередин; Дипольд, Клаус; Кейруз, Шейди (сентябрь 2007 г.). «Высокопроизводительная 3D-локализация звука для приложений наблюдения». Конференция IEEE 2007 г. по усовершенствованному видеонаблюдению и сигнальному наблюдению . стр. 563–6. дои : 10.1109/AVSS.2007.4425372 . ISBN 978-1-4244-1695-0 . S2CID 11238184 .
- ^ Дорогой Брюль. «Идентификация источника шума» . bksv.com . Брюль и Кьер.
- ^ Гольдштейн, Э.Брюс (13 февраля 2009 г.). Ощущение и восприятие (Восьмое изд.). Cengage Обучение. стр. 293–297. ISBN 978-0-495-60149-4 .
- ^ Дорогой Брюль. «Слушание в 3D» . Брюль и Кьер .
- ^ Jump up to: а б Накашима, Х.; Мукаи, Т. (2005). «Система 3D-локализации источника звука, основанная на обучении бинауральному слуху». 2005 Международная конференция IEEE по системам, человеку и кибернетике . Том. 4. С. 3534–3539. дои : 10.1109/ICSMC.2005.1571695 . ISBN 0-7803-9298-1 . S2CID 7446711 .
- ^ Лян, Юн; Цуй, Чжэн; Чжао, Шэнкуй; Рупноу, Кайл; Чжан, Ихао; Джонс, Дуглас Л.; Чен, Деминг (2012). «Внедрение и оптимизация производительности локализации 3D-звука на графических процессорах в реальном времени». Конференция и выставка «Автоматизация и испытания в Европе» : 832–5. ISSN 1530-1591 .
- ^ Фернандес Комесана, Д.; Стелтенпул, С.; Корбасевич, М.; Тайс, Э. (2015). «Прямое картографирование акустического векторного поля: новые инструменты сканирования для измерения трехмерной интенсивности звука в трехмерном пространстве» . Труды Euronoise : 891–895. ISSN 2226-5147 .
- ^ Ефрем Ю.; Малах, Д. (декабрь 1984 г.). «Улучшение речи с использованием краткосрочной оценки спектральной амплитуды с минимальной среднеквадратической ошибкой». Транзакции IEEE по акустике, речи и обработке сигналов . 32 (6): 1109–21. дои : 10.1109/ТАССП.1984.1164453 . ISSN 0096-3518 .
- ^ Валин, Дж. М.; Мишо, Ф.; Руа, Жан (14–19 мая 2006 г.). «Надежная 3D-локализация и отслеживание источников звука с использованием формирования луча и фильтрации частиц». Международная конференция IEEE 2006 г. по материалам акустики речи и обработки сигналов . Том. 4. с. IV. arXiv : 1604.01642 . дои : 10.1109/ICASSP.2006.1661100 . ISBN 978-1-4244-0469-8 . ISSN 1520-6149 . S2CID 557491 .
- ^ Перес Кабо, Даниэль; де Бри, Ганс Элиас; Фернандес Комсанья, Даниэль; Собрейра Сеоане, Маноэль. «Реальная локализация источника гармоник с использованием сети акустических векторных датчиков» . ЕвроШум 2015 .
- ^ Салас Натера, Массачусетс; Мартинес Родригес-Осорио, Р.; де Аро Ариет, Л.; Сьерра Перес, М. (2012). «Предложение по калибровке новых архитектур антенных решеток и технологий для космической связи» . Антенны IEEE и письма о распространении беспроводной связи . 11 : 1129–32. Бибкод : 2012IAWPL..11.1129S . дои : 10.1109/LAWP.2012.2215952 . ISSN 1536-1225 .
- ^ Иши, Коннектикут; Эвен, Дж.; Хагита, Н. (ноябрь 2013 г.). «Использование нескольких микрофонных решеток и отражений для трехмерной локализации источников звука». Международная конференция IEEE/RSJ по интеллектуальным роботам и системам , 2013 г. стр. 3937–42. дои : 10.1109/IROS.2013.6696919 . ISBN 978-1-4673-6358-7 . S2CID 16043629 .
- ^ «Снижение уровня шума компрессора Lontra LP2» .
- ^ Кейруз, Фахередин; Дипольд, Клаус (2006). «Усовершенствованный алгоритм бинауральной локализации трехмерного звука» . 2006 Международный симпозиум IEEE по обработке сигналов и информационным технологиям . стр. 662–665. дои : 10.1109/ISSPIT.2006.270883 . ISBN 0-7803-9754-1 . S2CID 14042947 .
- ^ Хён-Дон Ким; Коматани, К.; Огата, Т.; Окуно, Х.Г. (январь 2008 г.). Оценка локализации двухканального источника звука с использованием инструмента создания 3D-движущегося звука . ICERI 2008. doi : 10.1109/ICKS.2008.25 .
- ^ Табрикян, Дж. ; Мессер, Х. (январь 1996 г.). «Трехмерная локализация источника в волноводе». Транзакции IEEE по обработке сигналов . 44 (1): 1–13. Бибкод : 1996ИТСП...44....1Т . дои : 10.1109/78.482007 .
- ^ Гала, Дипак; Линдси, Натан; Сунь, Лян (июль 2018 г.). «Локализация активного источника звука в реальном времени для беспилотных наземных роботов с использованием самовращающейся матрицы бимикрофонов». Журнал интеллектуальных и робототехнических систем . 95 (3): 935–954. arXiv : 1804.03372 . дои : 10.1007/s10846-018-0908-3 . S2CID 4745823 .
- ^ Гала, Дипак; Линдси, Натан; Сунь, Лян (июнь 2018 г.). Трехмерная локализация источника звука для беспилотных наземных транспортных средств с помощью самовращающейся двухмикрофонной решетки . CDSR 2018. doi : 10.11159/cdsr18.104 .
- ^ Гала, Дипак; Линдси, Натан; Сунь, Лян (октябрь 2021 г.). Локализация нескольких источников звука с использованием машинного обучения для небольших автономных беспилотных транспортных средств с самовращающейся бимикрофонной решеткой . Журнал интеллектуальных и робототехнических систем . Том. 103, нет. 3. arXiv : 1804.05111 . дои : 10.1007/s10846-021-01481-4 .
- ^ Кейруз, Фахередин; Дипольд, Клаус (май 2008 г.). «Новое решение на основе нейронной сети, основанное на биологии, для роботизированного трехмерного обнаружения источника звука». Мягкие вычисления . 12 (7): 721–9. дои : 10.1007/s00500-007-0249-9 . ISSN 1432-7643 . S2CID 30037380 .
- ^ Хилл, Пенсильвания; Нельсон, Пенсильвания; Киркеби, О.; Хамада, Х. (декабрь 2000 г.). «Разрешение путаницы спереди и сзади в системах виртуальных акустических изображений». Журнал Акустического общества Америки . 108 (6): 2901–10. Бибкод : 2000ASAJ..108.2901H . дои : 10.1121/1.1323235 . ISSN 0001-4966 . ПМИД 11144583 .
- ^ Нориаки, Сакамото; ватару, Кобаяши; Такао, Оное; Исао, Сиракава (2001). «Реализация DSP алгоритма трехмерной локализации звука для монофонического источника звука». ICCS 2001. 8-я Международная конференция IEEE по электронике, схемам и системам (кат. № 01EX483) . Том. 2. С. 1061–1064. дои : 10.1109/ICECS.2001.957673 . ISBN 978-0-7803-7057-9 . S2CID 60528168 .
- ^ Саксена, А.; Нг, АЙ (2009). «Изучение местоположения звука с одного микрофона». 2009 Международная конференция IEEE по робототехнике и автоматизации . стр. 1737–1742. дои : 10.1109/РОБОТ.2009.5152861 . ISBN 978-1-4244-2788-8 . S2CID 14665341 .