Лоран-С

«Лоран-С» — гиперболическая радионавигационная система, позволяющая приемнику определять свое положение путем прослушивания низкочастотных радиосигналов, которые передаются стационарными наземными радиомаяками . «Лоран-С» объединил два разных метода, чтобы обеспечить сигнал, который был одновременно дальним и высокоточным — функции, которые раньше были несовместимы. Его недостатком была стоимость оборудования, необходимого для интерпретации сигналов, а это означало, что после его внедрения в 1957 году Loran-C использовался в основном военными.
К 1970-м годам стоимость, вес и размер электроники, необходимой для реализации Loran-C, резко сократились благодаря внедрению твердотельной электроники , а с середины 1970-х - первых микроконтроллеров для обработки сигнала. Недорогие и простые в использовании блоки Loran-C стали обычным явлением с конца 1970-х, особенно в начале 1980-х, а более ранние модели LORAN-C стали обычным явлением. [а] система была прекращена в пользу установки большего количества станций Loran-C по всему миру. Loran-C стала одной из самых распространенных и широко используемых навигационных систем на обширных территориях Северной Америки, Европы, Японии и всей Атлантики и Тихого океана. В Советском Союзе использовалась почти идентичная система «ЧАЙКА» .
Внедрение гражданской спутниковой навигации в 1990-х годах привело к быстрому сокращению использования Loran-C. Дискуссии о будущем Loran-C начались в 1990-х годах; было объявлено несколько дат отключения, а затем отменено. В 2010 году были отключены системы США и Канады, а также станции «Лоран-С/ЧАЙКА», которые использовались совместно с Россией. [2] [3] Несколько других сетей остались активными; некоторые были модернизированы для дальнейшего использования. В конце 2015 года навигационные сети в большей части Европы были отключены. [4] В декабре 2015 года в США также возобновилось обсуждение финансирования системы eLoran . [5] и NIST предложили профинансировать разработку приемника eLoran размером с микрочип для распределения сигналов синхронизации. [6]
Законодательство США, представленное позже, такое как Закон о национальной устойчивости и безопасности времени 2017 года, предлагало воскресить Лорана. [7] [8]
История
[ редактировать ]Лоран-А
[ редактировать ]Оригинальный ЛОРАН был предложен в 1940 году Альфредом Ли Лумисом на заседании Микроволнового комитета армии США. Армейская авиация заинтересовалась концепцией авиационной навигации, и после некоторого обсуждения они вернули требование к системе, обеспечивающей точность около 1 мили (1,6 км) на дальности 200 миль (320 км) и максимальную дальность, как для высотных самолетов около 500 миль (800 км). Микроволновой комитет, к этому времени организованный в то, что впоследствии стало Радиационной лабораторией Массачусетского технологического института , приступил к разработке как Проект 3 . Во время первых встреч член британской группы связи Таффи Боуэн упомянул, что он знал, что британцы также работают над аналогичной концепцией, но не имел никакой информации о ее эффективности. [9]
Группа разработчиков под руководством Лумиса быстро продвинулась в разработке конструкции передатчика и протестировала несколько систем в течение 1940 года, прежде чем остановилась на конструкции с частотой 3 МГц. Обширные измерения уровня сигнала были проведены путем установки обычного радиоприемника в универсал и поездки по восточным штатам. [10] Однако нестандартная конструкция приемника и связанные с ним дисплеи на электронно-лучевой трубке оказались более серьезной проблемой. Несмотря на несколько попыток решить эту проблему, нестабильность дисплея препятствовала точным измерениям, поскольку выходной сигнал смещался взад и вперед на лицевой стороне осциллографа. [11]
К этому времени команда стала намного лучше знакома с британской системой Gee и знала об их работе над «стробами», генератором временной развертки , который создавал на дисплее хорошо расположенные «точки», которые можно было использовать для точных измерений. . Это означало, что неточность позиционирования на дисплее не имела никакого влияния: любая неточность в положении сигнала также отражалась на стробоскопе, поэтому они оставались выровненными. Команда Проекта 3 встретилась с командой Джи в 1941 году и сразу же приняла это решение. Эта встреча также показала, что Проект 3 и Gee требовали почти идентичных систем с одинаковыми характеристиками, дальностью действия и точностью, но Gee уже завершила базовую разработку и приступила к первоначальному производству, что сделало Проект 3 излишним. [12]
В ответ команда Проекта 3 приказала ВВС армии принять на вооружение «Джи», а вместо этого, по указанию британской команды, переориентировала свои усилия на обеспечение дальней навигации в океанах, где «Джи» был бесполезен. Это вызвало интерес ВМС США , и серия экспериментов быстро продемонстрировала, что системы, использующие базовую концепцию Ge, но работающие на более низкой частоте около 2 МГц, обеспечивают разумную точность порядка нескольких миль на расстояниях порядка 1250 миль (2010 км), по крайней мере, ночью, когда сигналы этого диапазона частот могли выходить за пределы ионосферы . [12] Последовало быстрое развитие, и в 1943 году система, охватывающая западную Атлантику, заработала. За этим последовали дополнительные станции, сначала охватывающие европейскую сторону Атлантики, а затем большое расширение в Тихом океане. К концу войны насчитывалось 72 действующие станции ЛОРАН и целых 75 000 приемников.
В 1958 году управление системой ЛОРАН было передано Береговой охране США , которая переименовала систему в «Лоран-А» (в то время было введено строчное название). [13]
ЛФ ЛОРАН
[ редактировать ]Существует два способа реализации измерений времени, необходимых для гиперболической навигационной системы: системы синхронизации импульсов, такие как Gee и LORAN, и системы синхронизации фазы, такие как Decca Navigator System . [14]
Первый требует резких импульсов сигнала, и их точность обычно ограничивается тем, насколько быстро импульсы могут включаться и выключаться, что является функцией несущей частоты . В сигнале присутствует неоднозначность; одни и те же измерения могут быть действительными в двух местах относительно радиовещательных станций, но при нормальной работе они находятся на расстоянии сотен километров друг от друга, поэтому одну возможность можно исключить. [14]
Вторая система использует постоянные сигналы («непрерывная волна») и проводит измерения путем сравнения фазы двух сигналов. Эта система проста в использовании даже на очень низких частотах. Однако его сигнал неоднозначен на расстоянии длины волны, а это означает, что существуют сотни мест, которые будут возвращать один и тот же сигнал. Decca называла эти неоднозначные места ячейками . Это требует использования какого-либо другого метода навигации, чтобы выбрать, в какой соте находится приемник, а затем использовать измерения фазы для точного размещения приемника внутри соты. [14]
Были предприняты многочисленные попытки создать своего рода вторичную систему низкой точности, которую можно было бы использовать с системой фазового сравнения, такой как Decca, чтобы устранить двусмысленность. Среди многих методов была система направленного вещания, известная как POPI , и различные системы, сочетающие синхронизацию импульсов для навигации с низкой точностью и затем использование сравнения фаз для точной настройки. Сами Decca выделили одну частоту, «9f», для тестирования этой концепции комбинированного сигнала, но возможность сделать это появилась намного позже. Подобные концепции также использовались в экспериментальной системе Навархо в США. [15]
С самого начала проекта ЛОРАН было известно, что те же ЭЛТ-дисплеи, которые отображали импульсы ЛОРАНа, могли при соответствующем увеличении также показывать отдельные волны промежуточной частоты . Это означало, что согласование импульсов можно было использовать для получения грубой оценки, а затем оператор мог получить дополнительную точность синхронизации, выстраивая отдельные волны внутри импульса, как Decca. Это можно использовать либо для значительного повышения точности LORAN, либо, альтернативно, обеспечить аналогичную точность с использованием гораздо более низких несущих частот и, таким образом, значительно расширить эффективный диапазон. Это потребовало бы синхронизации передающих станций как по времени, так и по фазе, но большая часть этой проблемы уже была решена инженерами Decca. [14]
Вариант с большой дальностью действия представлял значительный интерес для береговой охраны, которая в 1945 году создала экспериментальную систему, известную как LF LORAN. Она работала на гораздо более низких частотах, чем первоначальный LORAN, на частоте 180 кГц, и требовала очень длинных аэростатных антенн. . Тестирование проводилось в течение года, включая несколько дальних перелетов вплоть до Бразилии . Затем экспериментальную систему отправили в Канаду, где она использовалась во время операции «Маскокс» в Арктике. Точность составила 150 футов (46 м) на расстоянии 750 миль (1210 км), что является значительным преимуществом по сравнению с LORAN. После закрытия Маскокса было решено сохранить работу системы в рамках так называемой операции «Маск теленок», которой руководит группа, состоящая из ВВС США , Королевских ВВС Канады , Королевских военно-морских сил Канады Великобритании. и Королевского корпуса сигналов . Система действовала до сентября 1947 года. [16]
Это привело к еще одной крупной серии испытаний, на этот раз проведенной недавно сформированными ВВС США, известной как операция «Жук». «Битл» располагался на крайнем севере, на границе Канады и Аляски, и использовал новые стальные башни длиной 625 футов (191 м), заменив кабельные антенны предыдущей системы, поднятые на воздушном шаре. Система вступила в строй в 1948 году и проработала два года до февраля 1950 года. К сожалению, станции оказались неудачно расположены, поскольку радиопередача над вечной мерзлотой оказалась намного короче, чем ожидалось, а синхронизация сигналов между станциями с помощью земных волн оказалась невозможной. Испытания также показали, что систему чрезвычайно сложно использовать на практике; Оператору было легко выбрать неправильные участки сигналов на дисплее, что приводило к значительной неточности в реальной жизни. [16]
ЦИКЛАН и Почему
[ редактировать ]В 1946 году Римский центр развития авиации разослал контракты на поставку более дальних и более точных навигационных систем, которые будут использоваться для дальней бомбардировочной навигации. Поскольку ВВС США переходили к меньшему количеству экипажей, например, в Boeing B-47 Stratojet только три человека , требовалась высокая степень автоматизации. Были приняты два контракта; Сперри Гироскоп предложил систему CYCLAN (CYCLe, соответствующую LoRAN), которая во многом была похожа на LF LORAN, но с дополнительной автоматизацией, а Сильвания предложилаWhyn, использующую навигацию по непрерывным волнам, как Decca, но с дополнительным кодированием с использованием частотной модуляции . Несмотря на огромные усилия, Уин так и не смог заставить работать, и его бросили. [17]
CYCLAN работал, отправляя одни и те же сигналы, подобные LF LORAN, на двух частотах: LF LORAN на 180 кГц и снова на 200 кГц. Соответствующее оборудование будет искать нарастающую амплитуду, указывающую на начало сигнального импульса, а затем использовать вентили выборки для извлечения фазы несущей. Использование двух приемников решило проблему несовпадения импульсов, поскольку фазы выравнивались правильно между двумя копиями сигнала только тогда, когда сравнивались одни и те же импульсы. Все это не было тривиально; Используя ламповую электронику той эпохи, экспериментальная система CYCLAN заполнила большую часть полуприцепа . [18]
CYCLAN оказался настолько успешным, что становилось все более очевидным, что проблемы, которые заставили инженеров использовать две частоты, оказались не такими серьезными, как ожидалось. Оказалось, что система, использующая одну частоту, будет работать так же хорошо, если использовать правильную электронику. Это была особенно хорошая новость, поскольку частота 200 кГц мешала существующему вещанию, и во время тестирования ее пришлось перевести на 160 кГц. [19]
В этот период проблема использования радиоспектра стала серьезной проблемой и привела к международным усилиям по выбору полосы частот, подходящей для навигации на большие расстояния. В конечном итоге этот процесс остановился на диапазоне от 90 до 100 кГц. CYCLAN, похоже, предположил, что точность даже на более низких частотах не является проблемой, и единственной реальной проблемой является стоимость задействованного оборудования. [19]
Цитак
[ редактировать ]Успех системы CYCLAN привел к заключению в 1952 году нового контракта со Sperry на новую систему, преследующую двойную цель: работать в диапазоне 100 кГц, будучи при этом одинаково точной, менее сложной и менее дорогой. Обычно эти цели были бы противоречивыми, но система CYCLAN дала всем участникам уверенность в том, что они могут быть достигнуты. Получившаяся система была известна как Cytac. [20]
Чтобы решить проблему сложности, была разработана новая схема для правильного расчета времени дискретизации сигнала. Он состоял из схемы для извлечения огибающей импульса, другой для извлечения производной огибающей и, наконец, еще одной, которая вычитала производную из огибающей. Результат этой заключительной операции становился отрицательным во время очень специфической и стабильной части нарастающего фронта импульса, и это пересечение нуля использовалось для запуска очень кратковременного вентиля выборки. Эта система заменила сложную систему часов, используемую в CYCLAN. Просто измеряя время между пересечениями нуля ведущего и вторичного преобразователей, можно было определить время импульса. [21]
Выходной сигнал семплера огибающей также направлялся на фазовращатель, который настраивал выходной сигнал локальных часов, который синхронизировался с основной несущей с помощью системы фазовой автоподстройки частоты . Это сохраняло фазу главного сигнала достаточно долго для прибытия вторичного сигнала. Затем стробирование вторичного сигнала сравнивалось с этим главным сигналом в фазовом детекторе , и в зависимости от разницы фаз создавалось изменяющееся напряжение. Это напряжение представляло собой измерение точного позиционирования. [21]
Система в целом прошла успешно во время испытаний до 1953 года, но были высказаны опасения по поводу мощности сигнала на большом расстоянии и возможности помех. Это привело к дальнейшим модификациям базового сигнала. Первый заключался в передаче серии импульсов вместо одного, передавая больше энергии в течение заданного времени и улучшая способность приемников настраиваться на полезный сигнал. Они также добавили фиксированный сдвиг фазы на 45° к каждому импульсу, чтобы можно было идентифицировать и отвергать простые непрерывные сигналы помех. [22]
Система Cytac прошла огромную серию испытаний в США и за рубежом. Учитывая потенциальную точность системы, было обнаружено, что даже незначительные изменения в синхронизации земных волн вызывают ошибки, которые можно устранить — такие проблемы, как количество рек, которые пересекает сигнал, вызывают предсказуемые задержки, которые можно измерить, а затем учесть в навигационных решениях. Это привело к созданию серии корректирующих контуров , которые можно было добавить к полученному сигналу, чтобы скорректировать эти проблемы, и они были напечатаны на диаграммах Cytac. Используя характерные особенности плотин в качестве целевых точек, серия испытаний продемонстрировала, что неисправленные сигналы обеспечивают точность порядка 100 ярдов, а добавление корректировок контура коррекции снижает эту точность до порядка десяти ярдов. [23]
Лоран-Б и -С
[ редактировать ]Именно в этот момент ВВС США, взяв на себя эти усилия при переходе от ВВС армии США , потеряли интерес к проекту. Хотя причины этого точно не известны, похоже, что идея полностью автоматизированной системы бомбардировки с использованием радиосредств больше не считалась возможной. [20] ВВС США участвовали в миссиях на расстояние около 1000 км (расстояние от Лондона до Берлина), и система Cytac могла бы хорошо работать на этих дальностях, но поскольку миссия изменилась на трансполярные миссии на расстояние 5000 км и более, даже Cytac не стал этого делать. обеспечить необходимый диапазон и точность. Они обратили свое внимание на использование инерциальных платформ и доплеровских радиолокационных систем, отменив работы над Cytac, а также над конкурирующей системой, известной как Navarho. [24]
Примерно в этот же период ВМС США начали работу над аналогичной системой, использующей комбинированное сравнение импульсов и фаз, но на основе существующей частоты LORAN 200 кГц. К этому времени ВМС США передали оперативный контроль над системой ЛОРАН Береговой охране, и предполагалось, что такая же договоренность будет верна и для любой новой системы. Таким образом, Береговой охране США была предоставлена возможность выбора названия для систем, и она решила переименовать существующую систему «Лоран-А» и новую систему «Лоран-Б». [1]
Поскольку Cytac полностью разработан, а его испытательная система на восточном побережье Соединенных Штатов законсервирована, ВМС США также решили повторно ввести Cytac в эксплуатацию для испытаний на дальнем расстоянии. Обширная серия испытаний через Атлантику была проведена USCGC Androscoggin , начиная с апреля 1956 года. Тем временем у «Лоран-Б» возникли серьезные проблемы с поддержанием синфазности своих передатчиков, и эта работа была прекращена. [б] В систему Cytac были внесены незначительные изменения для дальнейшего ее упрощения, включая сокращение интервала между цепочками импульсов с 1200 до 1000 мкс, частоту импульсов, измененную до 20 импульсов в секунду , чтобы соответствовать существующей системе Loran-A, а также фазовый сдвиг между импульсов с попеременным сдвигом на 0, 180 градусов вместо 45 градусов для каждого импульса в цепочке. [25]
Результатом стал Лоран-С. Испытания новой системы были интенсивными, и полеты над водой вокруг Бермудских островов показали, что 50% исправлений находятся в пределах круга радиусом 260 футов (79 м). [26] значительное улучшение по сравнению с оригинальным «Лоран-А», обеспечивающее точность системы «Джи», но на гораздо большей дальности. Первая цепочка была создана с использованием оригинальной экспериментальной системы Cytac, а вторая - в Средиземноморье в 1957 году. Затем последовали дальнейшие цепочки, охватывающие Северную Атлантику и большие территории Тихого океана. В то время глобальные карты были распечатаны с заштрихованными участками, обозначавшими область, где в большинстве эксплуатационных условий можно было получить точную координату на расстоянии 3 миль (4,8 км). Лоран-С работал в диапазоне частот от 90 до 110 кГц.
Улучшение систем
[ редактировать ]Первоначально Loran-C был спроектирован с высокой степенью автоматизации, что позволяло работать с системой быстрее, чем многоминутные измерения оригинального LORAN. Он также работал в «цепочках» связанных станций, что позволяло вносить исправления путем одновременного сравнения двух вторичных станций с одним главным. Обратной стороной этого подхода было то, что необходимое электронное оборудование, созданное с использованием ламповой технологии 1950-х годов, было очень большим. Поиск компаний, обладающих знаниями в области морской многоканальной электроники фазового сравнения, по иронии судьбы привел к компании Decca, которая создала AN/SPN-31, первый широко используемый приемник Loran-C. АН/СПН-31 весил более 100 фунтов (45 кг) и имел 52 органа управления. [27]
За ними последовали воздушно-десантные подразделения, и адаптированный AN/SPN-31 был испытан на Avro Vulcan в 1963 году. К середине 1960-х годов блоки с некоторой транзисторизацией становились все более распространенными, и во Вьетнаме была создана цепочка для поддержки американских войск. военные усилия там. Ряд операторов коммерческих авиакомпаний также экспериментировали с системой, используя ее для навигации по большому круговому маршруту между Северной Америкой и Европой. Однако инерционные платформы . в конечном итоге в этой роли все большее распространение получили [27]
В 1969 году Decca подала в суд на ВМС США за нарушение патентных прав, предоставив обширную документацию о своей работе над базовой концепцией еще в 1944 году, а также о «недостающей» частоте 9f. [с] на частоте 98 кГц, которая была отведена для экспериментов с использованием этой системы. Decca выиграла первоначальный иск, но решение было отменено в апелляционном порядке, когда ВМС заявили о «целесообразности военного времени». [28]
Лоран-Д и -Ф
[ редактировать ]Когда «Лоран-С» получил широкое распространение, ВВС США вновь заинтересовались его использованием в качестве системы наведения. Они предложили новую систему, наложенную поверх Loran-C, чтобы обеспечить еще более высокую точность, используя исправление Loran-C в качестве грубого сигнала наведения почти так же, как Loran-C извлекал грубое местоположение из синхронизации импульса, чтобы устранить неоднозначность в точное измерение. Чтобы обеспечить сверхточный сигнал наведения, «Лоран-Д» чередовал еще одну последовательность из восьми импульсов сразу после сигналов одной из существующих станций «Лоран-С», складывая два сигнала вместе. Этот метод стал известен как «Сверхштатная межимпульсная модуляция» (SIM). Они транслировались с помощью маломощных портативных передатчиков, обеспечивающих обслуживание на относительно небольшом расстоянии и с высокой точностью. [29]
Лоран-Д использовался только экспериментально во время военных игр в 1960-х годах с передатчика, установленного в Великобритании. Система также ограниченно использовалась во время войны во Вьетнаме в сочетании с системой лазерного целеуказания Pave Spot , комбинацией, известной как Pave Nail. Используя мобильные передатчики, навигационный приемник AN/ARN-92 LORAN мог достичь точности порядка 60 футов (18 м), а точечный лазер улучшил ее примерно до 20 футов (6,1 м). [29] Концепция SIM позже стала системой отправки дополнительных данных. [30] [31]
Примерно в то же время Motorola предложила новую систему, использующую псевдослучайные цепочки импульсов. Этот механизм гарантирует, что никакие две цепочки в течение заданного периода (порядка многих секунд) не будут иметь одинаковую структуру, что позволяет легко определить, является ли сигнал земной волной из недавней передачи или многоскачковым сигналом из предыдущей передачи. . Система Multi-User Tactical Navigation Systems (MUTNS) использовалась недолго, но было обнаружено, что Loran-D отвечает тем же требованиям, но имеет дополнительное преимущество, заключающееся в том, что он также является стандартным сигналом Loran-C. Хотя MUTNS не имел отношения к системам Лорана, его иногда называли Лоран-F . [32]
Отклонить
[ редактировать ]Несмотря на многочисленные преимущества, высокая стоимость реализации приемника Loran-C сделала его неэкономичным для многих пользователей. Кроме того, когда военные пользователи перешли с Loran-A на Loran-C, на рынок было выброшено большое количество излишних приемников Loran-A. Это сделало «Лоран-А» популярным, несмотря на то, что он был менее точным и довольно сложным в эксплуатации. К началу 1970-х годов внедрение интегральных схем, объединяющих полный радиоприемник, начало значительно снижать сложность измерений Loran-A, и полностью автоматизированные устройства размером со стереоприемник стали обычным явлением. Для тех пользователей, которым требуется более высокая точность, Decca добилась значительного успеха со своей системой Decca Navigator и выпустила устройства, сочетающие в себе оба приемника, используя Loran для устранения двусмысленностей в Decca.
То же быстрое развитие микроэлектроники, которое сделало «Лоран-А» настолько простым в эксплуатации, одинаково хорошо работало и с сигналами «Лоран-С», а очевидное желание иметь систему дальнего действия, которая могла бы также обеспечить достаточную точность для навигации по озерам и гаваням, привело к созданию «Открытие» системы Loran-C для публичного использования в 1974 году. Вскоре последовали гражданские приемники, и какое-то время также были распространены двухсистемные приемники кондиционера. Переход от A к C был чрезвычайно быстрым, в основном из-за быстрого падения цен, в результате чего первым приемником многих пользователей стал Loran-C. К концу 1970-х годов береговая охрана решила отключить «Лоран-А» в пользу добавления дополнительных станций «Лоран-С» для покрытия пробелов в его зоне покрытия. Первоначальная сеть Loran-A была отключена в 1979 и 1980 годах, при этом несколько ее устройств какое-то время использовались в Тихом океане. Учитывая широкую доступность карт Loran-A, многие приемники Loran-C включали систему преобразования координат между блоками A и C.
Одной из причин открытия «Лорана-С» для публики стал переход от «Лорана» к новым формам навигации, включая инерциальные навигационные системы , «Транзит» и «ОМЕГА» , что означало, что безопасность «Лорана» уже не была такой строгой, как в основной форме. навигации. Когда в 1980-х и 90-х годах эти новые системы уступили место GPS, этот процесс повторился, но на этот раз военные смогли разделить сигналы GPS таким образом, что они могли одновременно обеспечивать как безопасные военные, так и небезопасные гражданские сигналы. GPS было труднее принимать и декодировать, но к 1990-м годам необходимая электроника уже была такой же маленькой и недорогой, как Loran-C, что привело к быстрому внедрению, которое стало в значительной степени универсальным.
Лоран-С в 21 веке
[ редактировать ]Хотя к 2000 году Loran-C был в значительной степени ненужным, по состоянию на 2014 год он не исчез полностью. [update] из-за ряда опасений. Во-первых, систему GPS можно заглушить различными способами. Хотя то же самое можно сказать и о «Лоране-С», передатчики находятся под рукой и при необходимости их можно отрегулировать. Что еще более важно, существуют эффекты, которые могут привести к тому, что система GPS станет непригодной для использования на больших территориях, в частности, явления космической погоды и потенциальные события ЭМИ . Лоран, полностью расположенный под атмосферой, обеспечивает большую устойчивость к этим проблемам. В результате таких соображений были серьезные споры об относительных преимуществах поддержания работоспособности системы Loran-C.
В ноябре 2009 года Береговая охрана США объявила, что Loran-C не нужен США для морского судоходства. Это решение оставило судьбу LORAN и eLORAN в США секретарю Министерства внутренней безопасности . [33] Согласно последующему объявлению, Береговая охрана США в соответствии с Законом об ассигнованиях DHS прекратила передачу всех сигналов Loran-C США 8 февраля 2010 года. [2] 1 августа 2010 года передача российско-американского сигнала в США была прекращена. [2] а 3 августа 2010 г. все канадские сигналы были отключены USCG и CCG. [2] [3]
Европейский Союз решил, что потенциальные преимущества безопасности «Лорана» достойны не только поддержания работоспособности системы, но и ее модернизации и добавления новых станций. Это часть более широкой системы Eurofix , которая объединяет GPS, Galileo и девять станций Loran в единую интегрированную систему.
В 2014 году Норвегия и Франция объявили, что все оставшиеся у них передатчики, составляющие значительную часть системы Eurofix, будут отключены 31 декабря 2015 года. [34] Два оставшихся передатчика в Европе ( Анторн , Великобритания и Зильт , Германия) больше не смогут поддерживать службу позиционирования и навигации Loran, в результате чего Великобритания объявила, что ее пробная служба eLoran будет прекращена с той же даты. [35]
Описание
[ редактировать ]Гиперболическая навигация
[ редактировать ]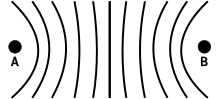
В традиционной навигации измерение местоположения или определение местоположения осуществляется путем проведения двух измерений относительно хорошо известных местоположений. В оптических системах это обычно достигается путем измерения угла до двух ориентиров, а затем рисования линий на морской карте под этими углами, создавая пересечение, которое показывает местоположение корабля. Радиометоды также могут использовать ту же концепцию с помощью радиопеленгатора , но из-за характера распространения радиоволн такие инструменты подвержены значительным ошибкам, особенно в ночное время. Более точную радионавигацию можно обеспечить с помощью методов синхронизации импульсов или сравнения фаз, которые основаны на времени прохождения сигналов. По сравнению с измерениями углов, они остаются довольно постоянными во времени, и большинство эффектов, которые меняют эти значения, связаны с фиксированными объектами, такими как реки и озера, которые можно учесть на картах.
Системы синхронизации могут определить абсолютное расстояние до объекта, как в случае с радаром . Проблема в случае с навигацией заключается в том, что приемник должен знать, когда был отправлен исходный сигнал. Теоретически можно синхронизировать точные часы с сигналом перед выходом из порта, а затем использовать их для сравнения времени сигнала во время рейса. Однако в 1940-х годах не было подходящей системы, которая могла бы передавать точный сигнал в течение всего периода оперативной миссии.
Вместо этого в радионавигационных системах принята концепция мультилатерации , основанная на разнице во времени (или фазе), а не на абсолютном времени. Основная идея заключается в том, что синхронизировать две наземные станции относительно легко, используя, например, сигнал, передаваемый по телефонной линии, поэтому можно быть уверенным, что полученные сигналы были отправлены в одно и то же время. Однако они не будут приняты в одно и то же время, поскольку приемник сначала примет сигнал от ближайшей станции. Синхронизировать разницу между двумя сигналами можно легко, сначала физически измерив их с помощью электронно-лучевой трубки или с помощью простой электроники в случае сравнения фаз.
Разница во времени сигнала сама по себе не указывает на местоположение. Вместо этого он определяет ряд мест, где такое время возможно. Например, если две станции находятся на расстоянии 300 км друг от друга и приемник не измеряет разницы в двух сигналах, это означает, что приемник находится где-то на линии, равноудаленной между ними. Если сигнал от одной из них принимается ровно через 100 мкс, то приемник находится на 30 километров (19 миль) ближе к одной станции, чем другая. Если нанести на график все места, где одна станция находится на 30 км ближе другой, получится кривая линия. Для определения местоположения необходимо выполнить два таких измерения с разными парами станций, а затем просмотреть обе кривые на навигационной карте. Кривые известны как линии положения или LOP. [36]
На практике радионавигационные системы обычно используют цепочку из трех или четырех станций, все из которых синхронизированы с главным сигналом, транслируемым с одной из станций. Остальные, вторичные , расположены так, что их LOP пересекаются под острыми углами, что повышает точность определения. Так, например, данная цепочка может иметь четыре станции с главной в центре, что позволяет приемнику принимать сигналы от двух вторичных станций, которые в данный момент находятся как можно ближе к прямым углам, насколько это возможно, учитывая их текущее местоположение. Современные системы, которые знают местонахождение всех вещательных компаний, могут автоматизировать выбор станций.
метод ЛОРАН
[ редактировать ]
В случае LORAN одна станция остается постоянной при каждом применении принципа, причем основная соединяется отдельно с двумя другими вторичными станциями. Учитывая две вторичные станции, разница во времени (TD) между основной и первой вторичной идентифицирует одну кривую, а разница во времени между основной и второй вторичной станциями идентифицирует другую кривую, пересечения которой будут определять географическую точку относительно положения три станции. Эти кривые называются линиями TD . [37]
На практике LORAN реализуется в виде интегрированных региональных массивов или цепочек , состоящих из одной первичной станции и как минимум двух (но часто и более) вторичных станций, с единым интервалом группового повторения (GRI), определяемым в микросекундах . Количество времени до передачи следующего набора импульсов определяется расстоянием между началом передачи первичного сигнала и следующим началом передачи первичного сигнала.
Вторичные станции получают этот импульсный сигнал от первичной, затем ждут заданное количество миллисекунд , известное как вторичного кодирования задержка , для передачи ответного сигнала. В данной цепочке задержка кодирования каждого вторичного устройства различна, что позволяет отдельно идентифицировать сигнал каждого вторичного устройства. (Однако на практике современные приемники LORAN не полагаются на это для вторичной идентификации.) [ нужна ссылка ]
Цепи LORAN (GRI)
[ редактировать ]
Каждая цепочка LORAN в мире использует уникальный групповой интервал повторения, число которого, умноженное на десять, дает, сколько микросекунд проходит между импульсами от данной станции в цепочке. На практике задержки во многих, но не во всех цепочках кратны 100 микросекундам. Цепи LORAN часто обозначаются этим обозначением, например , GRI 9960, обозначение цепи LORAN, обслуживающей северо-восток США . [ нужна ссылка ]
Из-за характера гиперболических кривых определенная комбинация основной и двух второстепенных станций может привести к образованию «сетки», в которой линии сетки пересекаются под небольшими углами. Для идеальной точности позиционирования желательно работать с навигационной сеткой, линии которой расположены ближе к прямым углам ( ортогональны ) друг к другу. По мере прохождения приемника по цепочке определенный набор вторичных линий, чьи линии TD изначально образовывали почти ортогональную сетку, может стать сеткой со значительным перекосом. В результате выбор одной или обеих вторичных линий должен быть изменен так, чтобы линии TD новой комбинации были ближе к прямым углам. [38] На практике почти все сети имеют как минимум три, а то и пять вторичных предприятий. [39]
карты ЛОРАН
[ редактировать ]
Там, где это возможно, обычные морские навигационные карты включают видимые изображения линий TD через равные промежутки времени над водными территориями. Линии TD, представляющие данную пару первичный-вторичный, напечатаны разными цветами и отмечают конкретную разницу во времени, указанную в каждой строке. На морской карте обозначение каждой линии положения приемника относительно оси и цвета можно найти в нижней части карты. Цвет на официальных картах станций и временные линии положения не соответствуют конкретным требованиям Международной гидрографической организации (МГО). Однако местные производители карт могут раскрасить их в соответствии со своим стандартом. Всегда сверяйтесь с примечаниями к карте, административной ссылкой на карту 1 и информацией, представленной на карте, для получения наиболее точной информации относительно исследований, данных и надежности.
учитываются три основных фактора При рассмотрении задержки и распространения сигнала в отношении LORAN-C :
- Первичный фазовый коэффициент (PF) – учитывает тот факт, что скорость распространения сигнала в атмосфере немного ниже, чем в вакууме.
- Вторичный фазовый коэффициент (SF) – учитывает тот факт, что скорость распространения сигнала замедляется при движении по морской воде из-за большей проводимости морской воды по сравнению с сушей.
- Дополнительные вторичные факторы (ASF). Поскольку передатчики LORAN-C в основном расположены на суше, сигнал будет распространяться частично по суше и частично по морской воде. ASF можно рассматривать как наземный и водный сегменты, каждый из которых имеет одинаковую проводимость в зависимости от того, проходит ли путь по суше или по воде.
В примечаниях к картам должно быть указано, были ли внесены поправки в ASF (например, карты Канадской гидрографической службы (CHS) включают их). В противном случае перед использованием необходимо получить соответствующие поправочные коэффициенты.
Из-за помех и проблем распространения, возникающих из-за особенностей местности и искусственных сооружений, таких как высотные здания, точность сигнала LORAN может значительно ухудшиться во внутренних районах (см. Ограничения ). В результате на морских картах не будут отображаться линии TD в этих областях, чтобы не использовать LORAN-C для навигации.
Традиционные приемники LORAN отображают разницу во времени между каждой парой основной и одной из двух выбранных вторичных станций, которая затем используется для поиска соответствующей линии TD на карте. Современные приемники LORAN отображают координаты широты и долготы вместо разницы во времени, а с появлением сравнения разницы во времени и электроники обеспечивают повышенную точность и лучшее определение местоположения, что позволяет наблюдателю легче отображать свое положение на морской карте. , При использовании таких координат система координат используемая приемником (обычно WGS84 ), должна совпадать с системой координат карты, или перед использованием координат необходимо выполнить ручные преобразования.
Тайминг и синхронизация
[ редактировать ]
Каждая станция LORAN оснащена набором специализированного оборудования для генерации точно синхронизированных сигналов, используемых для модуляции/управления передающим оборудованием. До трех коммерческих часов на атоме цезия используются для генерации сигналов с частотой 5 МГц и частотой импульсов в секунду (или 1 Гц), которые используются оборудованием синхронизации для генерации различных сигналов возбуждения, зависящих от GRI, для передающего оборудования.
Хотя каждая станция LORAN, эксплуатируемая США, должна быть синхронизирована с точностью до 100 нс от всемирного координированного времени (UTC), фактическая точность, достигнутая по состоянию на 1994 год, находилась в пределах 500 нс. [40]
Передатчики и антенны
[ редактировать ]Передатчики LORAN-C работают с пиковой мощностью 100–4000 киловатт, что сопоставимо с длинноволновыми радиовещательными станциями. В большинстве из них используются мачтовые радиаторы высотой 190–220 метров, изолированные от земли. Мачты индуктивно удлиняются и питаются от нагрузочной катушки (см.: электрическая длина ). Хорошо известным примером станции, использующей такую антенну, является Rantum . отдельно стоящие башенные радиаторы этого диапазона высоты. Также используются [ нужны разъяснения ] . Каролина-Бич использует отдельно стоящую антенную башню. Некоторые передатчики LORAN-C с выходной мощностью 1000 кВт и выше использовали чрезвычайно высокие 412-метровые мачтовые излучатели (см. ниже). Другие станции LORAN-C высокой мощности, такие как «Джордж» , использовали четыре Т-образные антенны, установленные на четырех мачтах с оттяжками, расположенных квадратом.
Все антенны LORAN-C спроектированы так, чтобы излучать всенаправленную диаграмму направленности. В отличие от станций длинноволнового вещания, станции LORAN-C не могут использовать резервные антенны, поскольку точное положение антенны является частью навигационных расчетов. Немного другое физическое расположение резервной антенны приведет к созданию линий положения, отличных от линий основной антенны.
Ограничения
[ редактировать ]-
 Освещение ЛОРАНа в Атлантическом океане (2006 г.)
Освещение ЛОРАНа в Атлантическом океане (2006 г.) -
 Освещение Тихого океана LORAN (2006 г.)
Освещение Тихого океана LORAN (2006 г.)


ЛОРАН страдает от электронных эффектов погоды и ионосферных эффектов восхода и заката солнца. Самый точный сигнал — это земная волна , которая следует за поверхностью Земли, в идеале — над морской водой. Ночью непрямая небесная волна обратно к поверхности , отклоняемая ионосферой , представляет собой проблему, поскольку несколько сигналов могут прийти по разным путям ( многолучевая интерференция ). Реакция ионосферы на восход и заход солнца является причиной особых возмущений в эти периоды. Геомагнитные бури имеют серьезные последствия, как и любая радиосистема.
ЛОРАН использует наземные передатчики, которые охватывают только определенные регионы. Покрытие довольно хорошее в Северной Америке, Европе и Азиатско-Тихоокеанском регионе.
Абсолютная точность LORAN-C варьируется от 0,10 до 0,25 миль (от 185 до 463 м). Повторяемая точность намного выше, обычно от 60 до 300 футов (от 18 до 91 м). [41]
Канал данных ЛОРАН (LDC)
[ редактировать ]Канал данных LORAN (LDC) — это проект, реализуемый ФАУ и береговой охраной США по отправке данных с низкой скоростью передачи данных с использованием системы LORAN. Сообщения, которые необходимо отправить, включают идентификацию станции, абсолютное время и сообщения коррекции положения. В 2001 году данные, аналогичные глобальной системы расширения (WAAS), сообщениям коррекции GPS были отправлены в рамках тестирования аляскинской цепи LORAN. По состоянию на ноябрь 2005 года тестовые сообщения с использованием LDC транслировались с нескольких станций LORAN в США. [42]
В последние годы LORAN-C использовался в Европе для отправки дифференциальных GPS и других сообщений, используя аналогичный метод передачи, известный как EUROFIX. [43]
Система под названием SPS (саудовская система позиционирования), аналогичная EUROFIX, используется в Саудовской Аравии. [44] К сигналу LORAN добавляются дифференциальные поправки GPS и информация о целостности GPS. Используется комбинированный приемник GPS/LORAN, и если привязка GPS недоступна, он автоматически переключается на LORAN.
Будущее
[ редактировать ]Поскольку системы LORAN обслуживаются и управляются правительствами, их дальнейшее существование зависит от государственной политики. С развитием других электронных навигационных систем, таких как системы спутниковой навигации , финансирование существующих систем не всегда гарантировано.
Критики, призывающие к ликвидации системы, заявляют, что у системы LORAN слишком мало пользователей, ей недостает экономической эффективности и что сигналы Глобальной навигационной спутниковой системы (GNSS) превосходят сигналы LORAN. [ нужна ссылка ] Сторонники продолжения и улучшения работы ЛОРАНА отмечают, что ЛОРАН использует сильный сигнал, который трудно заглушить, и что ЛОРАН представляет собой независимую, непохожую и дополняющую другие формы электронной навигации систему, которая помогает обеспечить доступность навигационных сигналов. [45] [46]
26 февраля 2009 года Управление управления и бюджета США опубликовало первый проект бюджета на 2010 финансовый год . [47] В этом документе система LORAN-C определена как «устаревшая» и поддерживается ее прекращение с предполагаемой экономией в 36 миллионов долларов в 2010 году и 190 миллионов долларов за пять лет.
21 апреля 2009 года Комитет Сената США по торговле, науке и транспорту и Комитет по внутренней безопасности и правительственным делам опубликовали материалы для параллельной бюджетной резолюции на 2010 финансовый год, поддержав постоянную поддержку системы LORAN, признав уже сделанные инвестиции в инфраструктуру. обновлений, а также признание проведенных исследований и вывод нескольких ведомств о том, что eLORAN является лучшей альтернативой GPS.
Сенатор Джей Рокфеллер , председатель комитета по торговле, науке и транспорту, написал, что комитет признал приоритетом «поддержание LORAN-C при переходе на eLORAN» как средство повышения национальной безопасности, морской безопасности и защиты окружающей среды на побережье. Сторожить.
Сенатор Коллинз, высокопоставленный член Комитета по внутренней безопасности и делам правительства, написал, что предложение президента по обзору бюджета о прекращении действия системы LORAN-C несовместимо с недавними инвестициями, признанными исследованиями и миссией Береговой охраны США. Комитет также признает инвестиции в размере 160 миллионов долларов, уже вложенные в модернизацию системы LORAN-C для поддержки полного развертывания eLORAN.
Кроме того, комитеты также признают многочисленные исследования, в которых оценивались системы резервного копирования GPS и пришли к выводу о необходимости резервного копирования GPS, а также определили eLORAN как лучшее и наиболее жизнеспособное резервное копирование. «Это предложение несовместимо с недавно опубликованным (январь 2009 г.) Федеральным планом радионавигации (FRP), который был совместно подготовлен DHS и министерствами обороны (DOD) и транспорта (DOT). FRP предложил программу eLORAN служить в качестве Резервное копирование положения, навигации и времени (PNT) в GPS (система глобального позиционирования)».
7 мая 2009 года президент Барак Обама предложил сократить финансирование (около 35 миллионов долларов в год) для LORAN, сославшись на его избыточность наряду с GPS. [48] Что касается находящегося на рассмотрении законопроекта Конгресса, HR 2892, впоследствии было объявлено, что «администрация поддерживает цель Комитета добиться упорядоченного прекращения эксплуатации посредством поэтапного вывода из эксплуатации, начиная с января 2010 года, а также требование о предоставлении сертификатов, документально подтверждающих, что прекращение работы LORAN-C не повлияет на безопасность на море или развитие возможных резервных возможностей или потребностей GPS». [49]
Также 7 мая 2009 года Главное бухгалтерское управление США (GAO), следственное подразделение Конгресса, опубликовало отчет, в котором упоминается вполне реальная вероятность ухудшения качества или выхода из строя системы GPS в свете задержек в программе, которые привели к запланированным запускам спутников GPS. сокращается до трех лет. [50]
12 мая 2009 года отчет Независимой группы оценки (IAT) о ЛОРАНе за март 2007 года был обнародован. В своем отчете ITA заявило, что «единогласно рекомендует правительству США завершить модернизацию eLORAN и взять на себя обязательство использовать eLORAN в качестве национальной резервной системы GPS в течение 20 лет». Публикация отчета последовала за обширной борьбой за Закон о свободе информации (FOIA), которую представители отрасли вели против федерального правительства. Первоначально завершенный 20 марта 2007 года и представленный исполнительным комитетам Министерства транспорта и Министерства внутренней безопасности (DHS), в нем тщательно рассматривались существующие навигационные системы, включая GPS. Единогласная рекомендация сохранить систему LORAN и перейти на eLORAN была основана на выводе команды о том, что LORAN работоспособен, развернут и достаточно точен, чтобы дополнять GPS. Команда также пришла к выводу, что стоимость вывода из эксплуатации системы LORAN превысит стоимость развертывания eLORAN, что сводит на нет любую заявленную экономию, предложенную администрацией Обамы, и раскрывает уязвимость США к сбоям в работе GPS. [51]
В ноябре 2009 года Береговая охрана США объявила, что станции LORAN-C, находящиеся под ее контролем, будут закрыты по бюджетным причинам после 4 января 2010 года при условии, что секретарь Министерства внутренней безопасности подтвердит, что LORAN не нужен в качестве резервной копии для GPS. [52]
7 января 2010 года Министерство внутренней безопасности опубликовало уведомление об окончательном прекращении эксплуатации LORAN-C. С 8 февраля 2010 года по всемирному координированному времени 2000 года Береговая охрана США прекратила всю работу и трансляцию сигналов LORAN-C в Соединенных Штатах. Передача береговой охраной США российско-американского сигнала ЧАЙКА была прекращена 1 августа 2010 года. Передача канадских сигналов LORAN-C была прекращена 3 августа 2010 года. [53]
эЛОРАН
[ редактировать ]Учитывая потенциальную уязвимость систем GNSS, [54] и их собственные ограничения распространения и приема, появился новый интерес к приложениям и разработкам LORAN. [54] Усовершенствованный LORAN, также известный как eLORAN или E-LORAN , включает в себя усовершенствованную конструкцию приемника и характеристики передачи, которые повышают точность и полезность традиционного LORAN. Заявленная точность составляет ± 8 метров. [55] система становится конкурентоспособной по сравнению с неусовершенствованной системой GPS. eLORAN также включает в себя дополнительные импульсы, которые могут передавать вспомогательные данные, такие как поправки дифференциального GPS (DGPS), а также обеспечивать целостность данных от подделки. [56] [57]
Приемники eLORAN используют прием «все на виду», включая сигналы от всех станций в радиусе действия, а не только от одного GRI, включая сигналы времени и другие данные от сорока станций. Эти усовершенствования в LORAN делают его адекватной заменой в сценариях, когда GPS недоступен или ухудшен. [58]
В 2017 году Морская ассоциация США сообщила, что Береговая охрана США сообщила о нескольких эпизодах помех GPS в Черном море . [59] [60] Южная Корея заявила, что Северная Корея заглушила GPS возле границы, мешая полетам самолетов и кораблей. К 2018 году Соединенные Штаты планировали создать новую систему eLoran в качестве дополнения и резервной копии системы GPS. Правительство Южной Кореи выдвинуло планы запустить к 2019 году три маяка eLoran, которых будет достаточно, чтобы обеспечить точные корректировки для всех поставок в регион, если Северная Корея (или кто-либо еще) попытается снова заблокировать GPS. [61] [62] [63] По состоянию на ноябрь 2021 года ни одна система eLoran не развернута. [64]
Внедрение eLORAN в Великобритании
[ редактировать ]31 мая 2007 года Министерство транспорта Великобритании (DfT) через генеральное управление маяков заключило 15-летний контракт на предоставление современной расширенной услуги LORAN (eLORAN) для повышения безопасности моряков в море. Великобритания и Западная Европа. Контракт на обслуживание должен был действовать в два этапа: работы по разработке и дальнейшее сосредоточение внимания на европейском соглашении о предоставлении услуг eLORAN с 2007 по 2010 год, а также полная эксплуатация услуги eLORAN с 2010 по 2022 год. Первый передатчик eLORAN был расположен на радиостанции Anthorn. Камбрия, Великобритания, и управлялась компанией Babcock International (ранее Babcock Communications). [65]
Правительство Великобритании одобрило строительство семи станций дифференциального позиционирования судов eLoran вдоль южного и восточного побережья Великобритании, чтобы помочь противостоять угрозе помех в системах глобального позиционирования. Они должны были выйти на первоначальную боевую готовность к лету 2014 года. [66] Главные маячные власти Великобритании и Ирландии объявили 31 октября 2014 года о начальной эксплуатационной готовности британского морского судна eLoran. Семь дифференциальных опорных станций предоставляли дополнительную информацию о местоположении, навигации и времени (PNT) посредством низкочастотных импульсов кораблям, оснащенным приемниками eLoran. Эта услуга должна была помочь обеспечить безопасную навигацию в случае сбоя GPS в одном из самых загруженных судоходных регионов мира с ожидаемым годовым трафиком в 200 000 судов к 2020 году. [67]
Несмотря на эти планы, в свете решения Франции и Норвегии прекратить передачу Loran 31 декабря 2015 года Великобритания объявила в начале того же месяца, что ее услуга eLoran будет прекращена в тот же день. [68] Однако, чтобы обеспечить возможность дальнейших исследований и разработки PNT, временной сигнал eLoran все еще активен из правительственного объекта в Анторне . [69]
Список передатчиков ЛОРАН-С
[ редактировать ]
Список передатчиков LORAN-C. Станции с антенной башней высотой более 300 метров (984 фута) выделены жирным шрифтом.
| Станция | Страна | Цепь | Координаты | Примечания |
|---|---|---|---|---|
| Афиф | Саудовская Аравия | Южная Саудовская Аравия (GRI 7030) Север Саудовской Аравии (GRI 8830) |
23 ° 48'36,66 "N 42 ° 51'18,17" E / 23,8101833 ° N 42,8550472 ° E | 400 кВт |
| Аль Хамасин | Саудовская Аравия | Южная Саудовская Аравия (GRI 7030) Север Саудовской Аравии (GRI 8830) |
20 ° 28'2,34 "N 44 ° 34'51,9" E / 20,4673167 ° N 44,581083 ° E | демонтирован |
| Аль Мувассам | Саудовская Аравия | Южная Саудовская Аравия (GRI 7030) Север Саудовской Аравии (GRI 8830) |
16 ° 25'56,87 "с.ш. 42 ° 48'6,21" в.д. / 16,4324639 ° с.ш. 42,8017250 ° в.д. | демонтирован |
| Огромный | Гренландия | неисправность | 59 ° 59'17,348 "N 45 ° 10'26,91" W / 59,98815222 ° N 45,1741417 ° W | остановлен 31 декабря 1994 г.; до 27 июля 1964 года использовал башню высотой 411,48 метра, снесен. |
| шиповник | Великобритания | Лессе (GRI 6731) | 54 ° 54'41,949 "N 3 ° 16'42,58" W / 54,91165250 ° N 3,2784944 ° W | Главный и подчиненный 9 января 2016 г. Замена передатчика Rugby. [70] Сигнал синхронизации eLoran остается активным. [69] |
| Ash Shaykh Humayd | Саудовская Аравия | Южная Саудовская Аравия (GRI 7030) Север Саудовской Аравии (GRI 8830) |
28°9′15.87″N 34°45′41.36″E / 28.1544083°N 34.7614889°E | |
| Остров Атту | Соединенные Штаты | Северная часть Тихого океана (GRI 9990) Российско-Американский (GRI 5980) неисправность |
52 ° 49'44 "N 173 ° 10'49,7" E / 52,82889 ° N 173,180472 ° E | снесен в августе 2010 г. |
| Баласор | Индия | Калькутта (GRI 5543) | 21°29′11,02″ с.ш. 86°55′9,66″ в.д. / 21,4863944° с.ш. 86,9193500°в.д. | |
| Живот | Гуам | неисправность | 13 ° 27'50,16 "с.ш. 144 ° 49'33,4" в.д. / 13,4639333 ° с.ш. 144,825944 ° в.д. | снесен |
| Бодетт | Соединенные Штаты | неисправность
Северо-Центральная часть США (GRI 8290) Великие озера (GRI 8970) |
48 ° 36'49,947 "с.ш. 94 ° 33'17,91" з.д. / 48,61387417 ° с.ш. 94,5549750 ° з.д. | демонтирован |
| Берлевог | Норвегия | Бё (GRI 7001) неисправность |
70 ° 50'43,07 "с.ш. 29 ° 12'16,04" в.д. / 70,8452972 ° с.ш. 29,2044556 ° в.д. | закрыто 31 декабря 2015 г. |
| Билимора | Индия | Бомбей (GRI 6042) | 20 ° 45'42,036 "N 73 ° 2'14,48" E / 20,76167667 ° N 73,0373556 ° E | |
| Бойсе Сити | Соединенные Штаты | неисправность
Великие озера (GRI 8970) |
36 ° 30'20,75 "с.ш. 102 ° 53'59,4" з.д. / 36,5057639 ° с.ш. 102,899833 ° з.д. | |
| Бё, Вестеролен | Норвегия | Бё (GRI 7001) Клятва (GRI 9007) неисправность |
68°38′6,216″ с.ш. 14°27′47,35″ в.д. / 68,63506000° с.ш. 14,4631528° в.д. | закрыт 31 декабря 2015 г., снесен в октябре 2016 г. |
| Кембридж Бэй | Канада | неисправность | 69 ° 6'52,840 "N 105 ° 0'55,95" W / 69,11467778 ° N 105,0155417 ° W | неисправность ; отдельно стоящая решетчатая башня, все еще используемая в качестве ненаправленного маяка , снесена |
| Кейп-Рейс | Канада | неисправность
Восточное побережье Канады (GRI 5930) |
46 ° 46'32,74 дюйма с.ш. 53 ° 10'28,66 дюйма з.д. / 46,7757611 ° с.ш., 53,1746278 ° з.д. | до 2 февраля 1993 года использовал башню высотой 411,48 метра, сейчас используется башня высотой 260,3 метра. Однако последний был закрыт в 2012 году. Снесен. |
| Карибу, Мэн | Соединенные Штаты | неисправность
Восточное побережье Канады (GRI 5930) |
46 ° 48'27,305 "N 67 ° 55'37,15" W / 46,80758472 ° N 67,9269861 ° W | снесен |
| Каролина Бич | Соединенные Штаты | неисправность
Юго-восток США (GRI 7980) |
34 ° 3'46,208 дюйма с.ш. 77 ° 54'46,10 дюйма з.д. / 34,06283556 ° с.ш. 77,9128056 ° з.д. | снесен |
| Чунцзуо | Китай | Китай Южное море (GRI 6780) | 22 ° 32'35,8 "N 107 ° 13'19" E / 22,543278 ° N 107,22194 ° E | |
| Комфортная бухта | Канада | неисправность
Восточное побережье Ньюфаундленда (GRI 7270) |
49 ° 19'53,65 "N 54 ° 51'43,2" W / 49,3315694 ° N 54,862000 ° W | снесен |
| Дана | Соединенные Штаты | неисправность
Великие озера (GRI 8970) |
39°51′7.64″N 87°29′10.71″W / 39.8521222°N 87.4863083°W | |
| Дхрангадхра | Индия | Бомбей (GRI 6042) | 23 ° 0'16,2 "N 71 ° 31'37,64" E / 23,004500 ° N 71,5271222 ° E | |
| Даймонд-Харбор | Индия | Калькутта (GRI 5543) | 22 ° 10'20,42 "N 88 ° 12'15,8" E / 22,1723389 ° N 88,204389 ° E | |
| Клятва | Фарерские острова | неисправность
Клятва (GRI 9007) |
62 ° 17'59,69 дюйма с.ш. 7 ° 4'25,59 дюйма з.д. / 62,2999139 ° с.ш. 7,0737750 ° з.д. | снесен |
| Варес Ставка | Испания | НАТО "С"
неисправность |
43 ° 47'11 "N 7 ° 40'45" W / 43,786348 ° N 7,679095 ° W | |
| пораженный | Испания | Средиземное море (GRI 7990) неисправность |
42 ° 3'36,63 "N 3 ° 12'16,08" E / 42,0601750 ° N 3,2044667 ° E | снесен |
| Фэллон | Соединенные Штаты | неисправность
Западное побережье США (GRI 9940) |
39 ° 33'6,77 дюйма с.ш. 118 ° 49'55,6 дюйма з.д. / 39,5518806 ° с.ш. 118,832111 ° з.д. | |
| Фокс-Харбор | Канада | неисправность
Восточное побережье Канады (GRI 5930) |
52 ° 22'35,29 "N 55 ° 42'28,68" W / 52,3764694 ° N 55,7079667 ° W | снесен |
| Джордж | Соединенные Штаты | неисправность
Западное побережье Канады (GRI 5990) |
47 ° 3'48,096 "с.ш. 119 ° 44'38,97" з.д. / 47,06336000 ° с.ш. 119,7441583 ° з.д. | |
| Гесаши | Япония | неисправность
Северо-западная часть Тихого океана (GRI 8930) |
26 ° 36'25,09 "N 128 ° 8'56,94" E / 26,6069694 ° N 128,1491500 ° E | снесен |
| Джилетт | Соединенные Штаты | неисправность
Северо-Центральная часть США (GRI 8290) |
44 ° 0'11,21 ″ с.ш. 105 ° 37'24 ″ з.д. / 44,0031139 ° с.ш. 105,62333 ° з.д. | |
| Грейнджвилль | Соединенные Штаты | неисправность
Юго-восток США (GRI 7980) |
30 ° 43'33,24 дюйма с.ш. 90 ° 49'43,01 дюйма з.д. / 30,7259000 ° с.ш. 90,8286139 ° з.д. | демонтирован |
| Гавр | Соединенные Штаты | неисправность
Северо-Центральная часть США (GRI 8290) |
48 ° 44'38,58 "с.ш. 109 ° 58'53,3" з.д. / 48,7440500 ° с.ш. 109,981472 ° з.д. | |
| Пещерный песок | Исландия | неисправность | 64 ° 54'14,793 "с.ш. 23 ° 54'47,83" з.д. / 64,90410917 ° с.ш. 23,9132861 ° з.д. | остановлен 31 декабря 1994 г.; Башня высотой 411,48 метра теперь используется для RÚV длинноволнового вещания на частоте 189 кГц. |
| Хелонг | Китай | Китай Северное море (GRI 7430) | 42 ° 43'11 "N 129 ° 6'27,07" E / 42,71972 ° N 129,1075194 ° E | |
| гексиан | Китай | Китай Южное море (GRI 6780) | 23 ° 58'3,21 "N 111 ° 43'9,78" E / 23,9675583 ° N 111,7193833 ° E | |
| Это Джима | Япония | неисправность | 24 ° 48'26,262 "N 141 ° 19'34,76" E / 24,80729500 ° N 141,3263222 ° E | закрыт в сентябре 1993 г.; демонтирован ; использовал башню высотой 411,48 метра |
| Красный Волшебник | Норвегия | Бё (GRI 7001) Эйде (GRI 9007) неисправность |
70°54′51,478″ с.ш. 8°43′56,52″ з.д. / 70,91429944° с.ш. 8,7323667° з.д. | закрыто 31 декабря 2015 г.; снесен в октябре 2017 года. |
| Остров Джонстон | Соединенные Штаты | неисправность | 16 ° 44'43,82 дюйма с.ш. 169 ° 30'30,9 дюйма з.д. / 16,7455056 ° с.ш., 169,508583 ° з.д. | закрыть, снести |
| Юпитер | Соединенные Штаты | неисправность
Юго-восток США (GRI 7980) |
27 ° 1'58,49 "N 80 ° 6'52,83" W / 27,0329139 ° N 80,1146750 ° W | снесен |
| Вороний нос | Турция | Средиземное море (GRI 7990) неисправность |
40 ° 58'20,51 ″ с.ш. 27 ° 52'1,89 ″ в.д. / 40,9723639 ° с.ш. 27,8671917 ° в.д. | снесен |
| Читать Джу | Южная Корея | Восточная Азия (GRI 9930) | 35 ° 2'23,69 "с.ш. 126 ° 32'27,2" в.д. / 35,0399139 ° с.ш. 126,540889 ° в.д. | |
| Лампедуза | Италия | Средиземное море (GRI 7990) неисправность |
35 ° 31'22,11 "N 12 ° 31'31,06" E / 35,5228083 ° N 12,5252944 ° E | неисправность |
| Кресты | Соединенные Штаты | неисправность
Южно-Центральная часть США (GRI 9610) |
32 ° 4'18,1 дюйма с.ш. 106 ° 52'4,32 дюйма з.д. / 32,071694 ° с.ш. 106,8678667 ° з.д. | |
| Лессе | Франция | Лессе (GRI 6731) Зильт (GRI 7499) неисправность |
49 ° 8'55,27 дюйма с.ш. 1 ° 30'17,03 дюйма з.д. / 49,1486861 ° с.ш. 1,5047306 ° з.д. | закрыт 31 декабря 2015 г., снесен |
| Петля головы | Ирландия | Лессе (GRI 6731) Клятва (GRI 9007) никогда не строился |
никогда не строился | 250 кВт [ нужна ссылка ] ; никогда не строился |
| Мэлоун | Соединенные Штаты | неисправность
Юго-восток США (GRI 7980) |
30 ° 59'38,87 дюйма с.ш. 85 ° 10'8,71 дюйма з.д. / 30,9941306 ° с.ш. 85,1690861 ° з.д. | демонтирован |
| Мидлтаун | Соединенные Штаты | неисправность
Западное побережье США (GRI 9940) |
38 ° 46'57,12 "с.ш. 122 ° 29'43,9" з.д. / 38,7825333 ° с.ш. 122,495528 ° з.д. | снесен |
| Минами-Тори-сима | Япония | неисправность
Северо-западная часть Тихого океана (GRI 8930) |
24 ° 17'8,79 "N 153 ° 58'52,2" E / 24,2857750 ° N 153,981167 ° E | до 1985 года использовал башню высотой 411,48 метра.
снесен |
| Нантакет | Соединенные Штаты | неисправность
Восточное побережье Канады (GRI 5930) |
41 ° 15'12,42 дюйма с.ш. 69 ° 58'38,73 дюйма з.д. / 41,2534500 ° с.ш., 69,9774250 ° з.д. | снесен |
| Узкая накидка | Соединенные Штаты | неисправность
0) |
57 ° 26'20,5 дюйма с.ш. 152 ° 22'10,2 дюйма з.д. / 57,439028 ° с.ш., 152,369500 ° з.д. | |
| Нидзима | Япония | неисправность
Северо-западная часть Тихого океана (GRI 8930) |
34°24′12,06″ с.ш. 139°16′19,4″ в.д. / 34,4033500° с.ш. 139,272056° в.д. | снесен |
| Патапур | Индия | Калькутта (GRI 5543) | 20 ° 26'50,627 "N 85 ° 49'38,67" E / 20,44739639 ° N 85,8274083 ° E | |
| Пхохан | Южная Корея | Северо-западная часть Тихого океана (GRI 8930) Восточная Азия (GRI 9930) |
36 ° 11'5,33 "с.ш. 129 ° 20'27,4" в.д. / 36,1848139 ° с.ш. 129,340944 ° в.д. | |
| Порт-Кларенс | Соединенные Штаты | Залив Аляска (GRI 7960) Северная часть Тихого океана (GRI 9990) неисправность |
65 ° 14'40,372 дюйма с.ш. 166 ° 53'11,996 дюйма з.д. / 65,24454778 ° с.ш. 166,88666556 ° з.д. | снесен 28 апреля 2010 г.; использовал башню высотой 411,48 метра [71] |
| Порт-Харди | Канада | неисправность
Западное побережье Канады (GRI 5990) |
50 ° 36'29,830 "N 127 ° 21'28,48" W / 50,60828611 ° N 127,3579111 ° W | снесен |
| Рантум (Зильт) | Германия | Лессе (GRI 6731) Зильт (GRI 7499) неисправность |
54°48′29.94″N 8°17′36.9″E / 54.8083167°N 8.293583°E | закрыто 31 декабря 2015 г. |
| Раймондвилль | Соединенные Штаты | неисправность
Юго-восток США (GRI 7980) |
26 ° 31'55,17 "с.ш. 97 ° 49'59,52" з.д. / 26,5319917 ° с.ш. 97,8332000 ° з.д. | демонтирован |
| Раопинг | Китай | Китай Южное море (GRI 6780) Китай Восточное море (GRI 8390) |
23 ° 43'26,02 "N 116 ° 53'44,7" E / 23,7238944 ° N 116,895750 ° E | |
| Жунчэн | Китай | Китай Северное море (GRI 7430) Китай Восточное море (GRI 8390) |
37 ° 03′51,765 ″ n 19′25,95 ″ E / 122,3238750 ° E | |
| Регби | Великобритания | Экспериментальный (GRI 6731) неисправность |
52 ° 21'57,893 дюйма с.ш. 1 ° 11'27,39 дюйма з.д. / 52,36608139 ° с.ш. 1,1909417 ° з.д. | закрыт в июле 2007 г., снесен |
| Сент-Пол | Соединенные Штаты | неисправность
Северная часть Тихого океана (GRI 9990) |
57 ° 9'12,35 дюйма с.ш. 170 ° 15'6,06 дюйма з.д. / 57,1534306 ° с.ш. 170,2516833 ° з.д. | снесен |
| Салва | Саудовская Аравия | Южная Саудовская Аравия (GRI 7030) Север Саудовской Аравии (GRI 8830) |
24 ° 50'1,46 дюйма с.ш. 50 ° 34'12,54 дюйма в.д. / 24,8337389 ° с.ш. 50,5701500 ° в.д. | |
| Прожектор | Соединенные Штаты | неисправность
Южно-Центральная часть США (GRI 9610) |
35 ° 19'18,305 "N 114 ° 48'16,88" W / 35,32175139 ° N 114,8046889 ° W | снесен |
| Селлия Марина | Италия | Средиземное море (GRI 7990) неисправность |
38 ° 52'20,72 дюйма с.ш. 16 ° 43'6,27 дюйма в.д. / 38,8724222 ° с.ш. 16,7184083 ° в.д. | неисправность |
| Сенека | Соединенные Штаты | неисправность
Великие озера (GRI 8970) |
42 ° 42'50,716 "N 76 ° 49'33,30" W / 42,71408778 ° N 76,8259167 ° W | демонтирован |
| Шоал-Коув | Соединенные Штаты | неисправность
Западное побережье Канады (GRI 5990) |
55 ° 26'20,940 "N 131 ° 15'19,09" W / 55,43915000 ° N 131,2553028 ° W | демонтирован |
| Сустонс | Франция | Лессе (GRI 6731) неисправность |
43 ° 44'23,21 "с.ш. 1 ° 22'49,63" з.д. / 43,7397806 ° с.ш. 1,3804528 ° з.д. | закрыт 31 декабря 2015 г., снесен |
| Взял | Соединенные Штаты | неисправность
Залив Аляска (GRI 7960) |
63 ° 19'42,884 дюйма с.ш. 142 ° 48'31,34 дюйма з.д. / 63,32857889 ° с.ш. 142,8087056 ° з.д. | снесен |
| Токатибуто | Япония | неисправность
Eastern Russia Chayka (GRI 7950) |
42 ° 44'37,2 "N 143 ° 43'10,5" E / 42,743667 ° N 143,719583 ° E | демонтирован |
| Уполо-Пойнт | Соединенные Штаты | неисправность | 20 ° 14'51,12 дюйма с.ш. 155 ° 53'4,34 дюйма з.д. / 20,2475333 ° с.ш., 155,8845389 ° з.д. | неисправность |
| Уэтерленд | Норвегия | Зильт (GRI 7499) Эйде (GRI 9007) неисправность |
61 ° 17'49,49 "с.ш. 4 ° 41'47,05" в.д. / 61,2970806 ° с.ш. 4,6964028 ° в.д. | закрыто 31 декабря 2015 г.; снесен 19 сентября 2017 г. |
| Веравал | Индия | Бомбей (GRI 6042) | 20 ° 57'09,316 "N 70 ° 20'11,73" E / 20,95258778 ° N 70,3365917 ° E | |
| Уильямс Лейк | Канада | неисправность
Западное побережье Канады (GRI 5990) |
51 ° 57'58,78 "с.ш. 122 ° 22'1,55" з.д. / 51,9663278 ° с.ш. 122,3670972 ° з.д. | демонтирован |
| Сюаньчэн | Китай | Китай Северное море (GRI 7430) Китай Восточное море (GRI 8390) |
31 ° 4'8,3 "N 118 ° 53'8,78" E / 31,068972 ° N 118,8857722 ° E | |
| Яп | Федеративные Штаты Микронезии | неисправность | 9 ° 32'44,76 "N 138 ° 9'53,48" E / 9,5457667 ° N 138,1648556 ° E | закрыть 1987 год; снесен ; использовал башню высотой 304,8 метра |

См. также
[ редактировать ]- Альфа (навигация) — российский аналог навигационной системы ОМЕГА, используется по состоянию на 2006 год.
- ЧАЙКА , российский аналог ЛОРАНА.
- Decca Navigator System — британская система, в которой фаз . вместо разницы во времени использовалась разность
- Ну и дела (навигация)
- Джи-Х (навигация)
- Глобальная система позиционирования
- Локальная система позиционирования
- Гобой (навигация)
- Омега (навигационная система) — западный аналог навигационной системы Альфа, больше не используется.
- ШОРАН
- Тактическая аэронавигационная система
- Трилатерация
- Всенаправленный диапазон УКВ
Примечания
[ редактировать ]- ^ Первоначальная система была известна как LORAN, сокращенная форма от LOng RAnge Navigation. Эксплуатация системы и недавно представленная система Loran-C были переданы Береговой охране в 1958 году. Название исходной системы было задним числом изменено на Loran-A, и с тех пор в ней использовались строчные буквы. Тем не менее, во многих документах оба названия написаны заглавными буквами, включая некоторые материалы Береговой охраны. [1]
- ↑ В общедоступных источниках имеется очень мало информации о Лоран-Б, а о причинах его неудачи и того меньше.
- ^ Бланшар использует 7f и 9f на разных страницах.
Ссылки
[ редактировать ]Цитаты
[ редактировать ]- ^ Jump up to: а б Хефли 1972 , с. xi..
- ^ Jump up to: а б с д «ЛОРАН-С Общая информация» . Береговая охрана США . Проверено 4 августа 2010 г.
- ^ Jump up to: а б «Прекращение службы Лоран-С» . notmar.gc.ca . Архивировано из оригинала 20 ноября 2013 года . Проверено 4 августа 2010 г. (для доступа нажмите «Я прочитал...» и «Принять»)
- ^ «Лоран отключен от эфира в большинстве стран Европы, возможно, перейдет в рекламу» . Фонд устойчивой навигации и синхронизации . 4 января 2016 г.
- ^ Дивис, Ди Энн (10 декабря 2015 г.). «PNT ExCom поддерживает eLoran как шаг к полной резервной системе GPS» . Внутри GNSS (январь/февраль 2016 г.).
- ^ «Будет финансироваться eLoran на чипе — NIST» . Фонд устойчивой навигации и синхронизации . 11 февраля 2016 г.
- ^ Мартин, Аарон (19 декабря 2017 г.). «Законопроект Сената потребует создания наземной альтернативы спутниковым сигналам времени GPS» . Новости национальной готовности . Архивировано из оригинала 15 января 2018 года.
- ^ «Закон о полномочиях береговой охраны 2017 года» .
- ^ Хэлфорд, Дэвидсон и Вальдшмитт 1948 , с. 19.
- ^ Хэлфорд, Дэвидсон и Вальдшмитт, «История ЛОРАНА». Архивировано 23 сентября 2016 г. в Wayback Machine , Радиационная лаборатория Массачусетского технологического института, стр. 19-23.
- ^ Бланшар 1991 , стр. 305–306.
- ^ Jump up to: а б Хэлфорд, Дэвидсон и Вальдшмитт, 1948 , с. 22.
- ^ Хефли 1972 , с. xi.
- ^ Jump up to: а б с д Бланшар 1991 , стр. 302–303.
- ^ Бланшар 1991 , с. 302.
- ^ Jump up to: а б Хефли 1972 , с. 16.
- ^ Хефли 1972 , стр. 19–20.
- ^ Хефли 1972 , стр. 20–21.
- ^ Jump up to: а б Хефли 1972 , стр. 23–24.
- ^ Jump up to: а б Хефли 1972 , стр. 25.
- ^ Jump up to: а б Хефли 1972 , стр. 26.
- ^ Хефли 1972 , стр. 33.
- ^ Хефли 1972 , стр. 58.
- ↑ Гил МакЭлрой, «История Лорана-C». Архивировано 1 мая 2017 года в Wayback Machine.
- ^ Хефли 1972 , стр. 72.
- ^ Хефли 1972 , стр. 78.
- ^ Jump up to: а б Бланшар 1991 , с. 310.
- ^ Бланшар 1991 , с. 311.
- ^ Jump up to: а б Джордж Галдориси и Томас Филлипс, «Не оставлять никого позади» , MBI Publishing, 2009, стр. 391.
- ^ Джеймс Кэффери, «Беспроводное определение местоположения в системах сотовой радиосвязи CDMA» , Springer, 2000, стр. 5.
- ↑ Даррел Уиткомб, «PAVE NAIL: там, в начале революции высокоточного оружия». Архивировано 30 мая 2014 г. в Wayback Machine.
- ^ «Материалы одиннадцатого ежегодного технического симпозиума» , стр. 7.
- ^ «Письмо сенатской комиссии» . Архивировано из оригинала 12 декабря 2009 года.
- ^ http://kartverket.no/efs-documents/editions/2015/efs01-2015.pdf , стр. 26.
- ^ «27-15 Enhanced Loran снят с производства» . Уведомление морякам . Троицкий дом . 1 декабря 2015 г.
- ^ Эпплярд, Сан-Франциско; Линфорд, RS ; Ярвуд, П.Дж. (1988). Морская электронная навигация (2-е изд.). Рутледж и Кеган Пол. стр. 100-1 77–83. ISBN 0-7102-1271-2 .
- ^ «Американский практический мореплаватель, воплощение навигации, стр. 173» . Архивировано из оригинала 1 декабря 2009 года.
- ^ Хефли, Гиффорд (1972). Разработка системы навигации и синхронизации Loran-C (Монография NBS 129) . Национальное бюро стандартов Министерства торговли США. п. 12. ЛЦН 72-600267 .
- ^ AC 90-92 Рекомендации по оперативному использованию навигационной системы Loran-C за пределами национальной системы воздушного пространства США (NAS) (редакция 2012 г. отменена). Министерство транспорта США (ФАУ). 1993. с. 2.
- ^ «Глава 2 – Передачи LORAN-C» (PDF) . Спецификация передаваемого сигнала LORAN-C / COMDTINST M16562.4A . Береговая охрана США. 1994. С. 6, 7 . Проверено 4 сентября 2012 г.
- ^ COMDTPUB P16562.6, «Руководство пользователя LORAN-C», 1992 г.
- ^ Предприятие, IDG (7 февраля 2005 г.). Компьютерный мир . ИДГ Предприятие.
- ^ Международные рефераты по аэрокосмической отрасли . Служба технической информации Американского института аэронавтики и астронавтики. 1990.
- ^ «Новая система навигационного позиционирования, управляемая Управлением портов Саудовской Аравии» . Управление портов Саудовской Аравии. 2006. Архивировано из оригинала 10 февраля 2011 года . Проверено 21 января 2011 г.
- ^ «Документ с расширенным определением Лорана (элорана)» (PDF) . Международная Лоран Ассоциация. 16 октября 2007 г. Архивировано из оригинала (PDF) 2 сентября 2009 г. . Проверено 18 июля 2010 г.
- ^ «Резервное копирование GPS« требует дополнительных исследований »» . BBC Online , 20 июня 2008 г., дата обращения 5 октября 2010 г.
- ^ Управление управления и бюджета. (www.budget.gov), «Новая эра ответственности, возобновляющая обещания Америки», Бюджет на 2010 финансовый год, раздел Министерства внутренней безопасности, стр. 72
- ^ «Обама: Сокращение бюджета дает «настоящие деньги» » .
- ^ «HR 2892 — Закон об ассигнованиях Министерства внутренней безопасности, 2010 г.» . C-SPAN.org. 8 июля 2009 года. Архивировано из оригинала 23 июля 2012 года . Проверено 10 августа 2009 г.
- ^ Управление подотчетности правительства США (7 мая 2009 г.). «Глобальная система позиционирования: значительные проблемы в поддержании и обновлении широко используемых возможностей» (GAO-09-670T) – через www.gao.gov.
{{cite journal}}: Для цитирования журнала требуется|journal=( помощь ) - ^ «Исследование Лорана наконец-то вышло на свободу: говорит, что лучший вариант - оставить его, лучший вариант - проектирование и тестирование интеграции системы GPS» . Архивировано из оригинала 29 мая 2009 года . Проверено 27 мая 2009 г.
- ^ «Выпуск менеджера программы USCG LORAN, ноябрь 2009 г.» . 31 мая 2007 года . Проверено 28 ноября 2009 г.
- ^ «ЛОРАН-С Общая информация» . www.navcen.uscg.gov .
- ^ Jump up to: а б Палмер, Джейсон (23 февраля 2010 г.). «Системы спутниковой навигации находятся под растущей угрозой со стороны «глушилок» » . Новости Би-би-си .
- ^ «Резервное копирование GPS: является ли eLoran ответом?» . Авиация сегодня . Апрель 2012. Архивировано из оригинала 26 июня 2012 года . Проверено 10 января 2013 г.
- ^ Ло, Шерман; Петерсон, Бенджамин (3 августа 2016 г.). «Улучшенный Лоран» (PDF) .
- ^ Беккер, Георг Т.; Ло, Шерман; Де Лоренцо, Дэвид; Цю, Ди; Паар1, Кристоф; Энге, Пер. «Эффективные механизмы аутентификации для навигационных систем – пример радионавигации» (PDF) . Архивировано из оригинала (PDF) 29 ноября 2019 года . Проверено 11 марта 2019 г.
{{cite web}}: CS1 maint: числовые имена: список авторов ( ссылка ) - ^ Пресс-служба (7 февраля 2008 г.). «Заявление пресс-секретаря DHS Лоры Кинер о внедрении национальной резервной системы GPS» (PDF) . пресс-релиз . Министерство внутренней безопасности США . Архивировано из оригинала (PDF) 14 мая 2008 года . Проверено 10 января 2013 г.
- ^ Морская ассоциация США. «2017-005А-Черное море-GPS-помехи» .
- ^ Морская ассоциация США. «2017-007-Глобальный сбой в работе GPS» .
- ^ Галлахер, Шон (7 августа 2017 г.). «Радионавигация настроена на глобальное возвращение в качестве резервной копии GPS, потому что кибер» . Арс Техника .
- ^ «GPS.gov: Инфраструктура LORAN-C и E-LORAN» . www.gps.gov .
- ^ Наринс, Митч (3 июня 2014 г.). «Глобальная эволюция инфраструктуры Loran / eLoran: надежная и отказоустойчивая резервная копия PNT для GNSS» (PDF) . GPS.gov . Федеральное управление гражданской авиации . Проверено 13 ноября 2022 г.
- ^ «ELoran: Часть решения уязвимости GNSS» . 3 ноября 2021 г.
- ^ «GLA заключает с Babcock Communications 15-летний контракт eLORAN» . Троицкий дом . 31 мая 2007 г. Архивировано из оригинала 19 марта 2011 г. . Проверено 27 мая 2010 г.
- ^ Международная газета Nautilus, август 2013 г.
- ^ Мир GPS. Декабрь 2014.
- ^ «Извещение морякам» . Троицкий дом . 1 декабря 2015 года. Архивировано из оригинала 4 марта 2016 года . Проверено 30 декабря 2015 г.
- ^ Jump up to: а б «Благодаря новой космической программе Великобритания продолжает движение к более целостному PNT» . GPS мир. 25 сентября 2020 г. Проверено 17 ноября 2021 г.
- ^ «Электронная система определения местоположения» (PDF) . Извещения Адмиралтейства морякам (26/07). Гидрографическое управление Соединенного Королевства. 28 июня 2007 г. Архивировано из оригинала (PDF) 24 июня 2008 г. . Проверено 19 января 2008 г.
- ^ «Видео сноса башни станции ЛОРАН в Порт-Кларенсе» . Новости береговой охраны . 1 мая 2010 г.
Библиография
[ редактировать ]- Министерство транспорта и Министерство обороны (февраль 2006 г.). «Федеральный план радионавигации на 2005 год» (PDF) . Проверено 26 февраля 2006 г.
- Хефли, Гиффорд (1972). Разработка навигации и синхронизации Loran-C . Национальное бюро стандартов.
- Бланшар, WF (сентябрь 1991 г.). «Гиперболические бортовые радионавигационные средства». Журнал навигации : 285–315. дои : 10.1017/S0373463300010092 . S2CID 130079994 .
- Л. Е. Гаттерер «Развитие навигации и синхронизации Loran-C» , Национальное бюро стандартов, октябрь 1972 г.
- Конант, Дженнет (2002). Такседо-Парк: магнат с Уолл-стрит и секретный дворец науки, изменивший ход Второй мировой войны . Нью-Йорк: Саймон и Шустер. стр. 231–232 . ISBN 0-684-87287-0 .
- Хэлфорд, Джон Элвин; Дэвидсон, Д.; Вальдшмитт, Дж. А. (1948). «История ЛОРАНА» (PDF) . В Пирсе, Джон Элвин; Маккензи, Александр Андерсон; Вудворд, Ричард Гораций (ред.). ЛОРАН: Дальняя навигация . Управление научных исследований и разработок, Комитет национальных оборонных исследований. Серия радиационной лаборатории Массачусетского технологического института. Том. 4. Нью-Йорк: МакГроу Хилл. стр. 19–51.
Внешние ссылки
[ редактировать ] в этой статье Использование внешних ссылок может не соответствовать политике и рекомендациям Википедии . ( Июль 2021 г. ) |
- Сайт Национального института стандартов и технологий США — использование LORAN C для учета времени.
- Веб-сайт европейской сети Loran-C
- Передатчик LORAN-C (Rantum) на сооружениях
- Передающая башня Хеллиссандур в Structurae : бывшая мачта передатчика LORAN-C, теперь используемая для длинноволнового вещания.
- Антенна объекта LORAN-C (Gillette, Вайоминг) в Structurae
- Антенна объекта LORAN-C (Порт-Кларенс, Аляска) в Structurae
- Джерри Прок, VE3FAB: Гиперболические радионавигационные системы :
- Интегрированные прототипы GPS/Loran для авиационного применения
- Переход на Enhanced или eLoran
- GNSS/eLoran для измерения времени и частоты от Locus, Inc.
- Способность Лорана смягчить влияние сбоя GPS на приложения GPS-позиционирования, навигации и времени от Locus, Inc.
- Новый потенциал низкочастотной радионавигации в XXI веке Кандидатская диссертация
- Цепи LORAN-C в эксплуатации. Архивировано 6 февраля 2012 г. в Wayback Machine.
- Список активных передатчиков LORAN-C
- SDR в действии: последний приемник LORAN-C представляет собой техническое описание использования программно-определяемой радиосвязи для декодирования сигналов LORAN-C.
- Новая новостная статья о предоставлении услуг eLORAN в Великобритании . Новостная статья о: Великобритания лидирует в предоставлении услуг eLORAN.
- eLORAN против Loran-C. Архивировано 7 октября 2010 г. в Wayback Machine на Inside GNSS - короткая статья, описывающая инновации в eLORAN.
- История ЛОРАНА
- Доктор Г. Линн Рот (октябрь 1998 г.). «Дело Лорана» . Международная Лоран Ассоциация. Архивировано из оригинала 27 января 2010 года . Проверено 18 июля 2010 г.