Гиперболическая навигация



Гиперболическая навигация - это класс радионавигационных систем, в которых навигационный приемник используется для определения местоположения на основе разницы во времени радиоволн, полученных от передатчиков радионавигационных маяков .
Такие системы полагаются на способность двух далеко расположенных станций транслировать сигнал, сильно коррелированный во времени. Типичные системы одновременно передают либо короткие импульсы, либо непрерывные сигналы, одинаковые по фазе . Приемник, расположенный в средней точке между двумя станциями, будет принимать сигналы одновременно или иметь одинаковую фазу, но в любом другом месте сигнал от более близкой станции будет принят первым или иметь другую фазу.
Для определения местоположения приемника необходимо, чтобы две синхронизированные станции были настроены одновременно, чтобы можно было сравнить сигналы. Это показывает разницу во времени, соответствующую относительному расстоянию ближе к одной или другой станции. Если нанести на карту все места, где может возникнуть эта разница во времени, появится гиперболическая линия на карте . Чтобы получить «фиксацию», также включается вторая пара станций для создания второй такой кривой. Две кривые обычно пересекаются в двух местах, поэтому для определения точного местоположения необходима другая навигационная система или третье измерение.
Системы гиперболической локации впервые были использованы во время Первой мировой войны в системах акустической локации для определения местоположения артиллерии противника . Звук выстрела снаряда был принят несколькими микрофонами, а время приема отправлено в вычислительный центр для определения местоположения. Эти системы использовались во время Второй мировой войны . Первой гиперболической радионавигационной системой была Второй мировой войны времен система Gee , представленная Королевскими ВВС для использования бомбардировочным командованием Королевских ВВС . За этим последовала система Decca Navigator в 1944 году для Королевского флота , а также система LORAN для ВМС США для дальней навигации на море. Послевоенные примеры, включая знаменитую систему береговой охраны США «Лоран-С» , международную систему «Омега» , а также советские «Альфу» и «ЧАЙКУ» . Все эти системы использовались до тех пор, пока их не заменили системы спутниковой навигации, такие как система глобального позиционирования в 1990-х годах (GPS).
В 2023 году был испытан прототип навигационной системы, основанной на обнаружении мюонных субатомных частиц, приходящих с космическими лучами , которая будет работать под землей и под водой. [1] [2]
Основные понятия
[ редактировать ]Навигация по времени
[ редактировать ]Рассмотрим две наземные радиостанции, расположенные на заданном расстоянии друг от друга, скажем, в 300 км, так что на скорости света они находятся на расстоянии почти ровно 1 мс . Обе станции оснащены идентичными передатчиками, предназначенными для передачи коротких импульсов на определенной частоте. Одна из таких станций, называемая «вторичной», также оснащена радиоприемником . Когда этот приемник слышит сигнал от другой станции, называемой «основной», он запускает собственную трансляцию. Затем первичная станция может передавать любую серию импульсов, а вторичная станция слышит их и генерирует ту же серию после задержки в 1 мс.
Рассмотрим портативный приемник, расположенный в средней точке линии, проведенной между двумя станциями, известной как базовая линия . В этом случае сигналы дойдут до приемника обязательно за 0,5 мс. Измерив это время, они смогли определить, что находятся ровно в 150 км от обеих станций, и тем самым точно определить их местоположение. Если приемник переместится в другое место на линии, синхронизация сигналов изменится. Например, если они синхронизируют сигналы на 0,25 и 0,75 мс, они находятся в 75 км от ближайшей станции и в 225 км от дальней.
Если приемник переместится в сторону базовой линии, задержка от обеих станций вырастет. Например, в какой-то момент они измерят задержку в 1 и 1,5 мс, что означает, что приемник находится на расстоянии 300 км от одной станции и 450 км от другой. Если вокруг двух станций нарисовать на карте круги радиусом 300 и 450 км, то круги пересекутся в двух точках. При наличии любого дополнительного источника навигационной информации одно из этих двух пересечений можно исключить как возможность и, таким образом, выявить их точное местоположение или «исправить».
Абсолютное и дифференциальное время
[ редактировать ]У этого подхода есть серьезная практическая проблема: чтобы измерить время, необходимое сигналу для достижения получателя, получатель должен знать точное время, когда сигнал был первоначально отправлен. Это невозможно в случае несовместимых источников сигнала (например, вражеской артиллерии), и до 2000-х годов широкое распространение часов было нерешенной проблемой до широкого внедрения недорогих GPS-приемников.
В 1930-е годы такие точные измерения времени были просто невозможны; часы необходимой точности было достаточно сложно изготовить в фиксированной форме, не говоря уже о портативных. Например, высококачественный кварцевый генератор дрейфует примерно 1–2 секунды в месяц, или 1,4 × 10 −3 секунд в час . [3] Это может показаться незначительным, но поскольку свет движется со скоростью 300 миллионов метров в секунду (190 000 миль в секунду), это означает смещение на 420 км в час. Всего несколько часов полета сделают такую систему непригодной для использования, и эта ситуация сохранялась до появления коммерческих атомных часов в 1960-х годах.
Однако можно точно измерить разницу между двумя сигналами. Большая часть разработки подходящего оборудования велась между 1935 и 1938 годами в рамках усилий по развертыванию радиолокационных систем. Великобритания Home , в частности, вложила значительные усилия в развитие своей системы Chain . Системы радиолокационного отображения для Chain Home были основаны на осциллографах (или осциллографах, как их называли в то время), которые запускали развертку при отправке широковещательного сигнала. Обратные сигналы усиливались и отправлялись на дисплей, вызывая «сигнал». Измерив расстояние от каких-либо точек по лицевой стороне осциллографа, можно было измерить время между передачей и приемом, тем самым выявив расстояние до цели.
С очень незначительной модификацией один и тот же дисплей можно было использовать для измерения разницы между двумя произвольными сигналами. Для навигационного использования можно использовать любое количество опознавательных характеристик, чтобы отличить первичные сигналы от вторичных. В этом случае портативный приемник запускал трассировку при получении первичного сигнала. Когда сигналы от вторичного источника поступали, они вызывали вспышку на дисплее так же, как цель на радаре, и точную задержку между первичным и вторичным сигналами легко определить.
Исправление положения
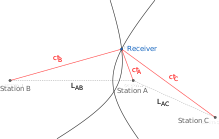
[ редактировать ]Рассмотрим те же примеры, что и в наших первоначальных случаях абсолютного времени. Если приемник расположен в средней точке базовой линии, два сигнала будут приняты точно в одно и то же время, поэтому задержка между ними будет равна нулю. Однако задержка будет равна нулю не только в том случае, если они расположены на расстоянии 150 км от обеих станций и, следовательно, в середине базовой линии, но и если они расположены на расстоянии 200 км от обеих станций, 300 км и т.д. Таким образом, в этом случае приемник не может определить их точное местоположение, а только то, что их местоположение находится где-то вдоль линии, перпендикулярной базовой линии.
Во втором примере приемники определили время как 0,25 и 0,75 мс, поэтому измеренная задержка составит 0,5 мс. Есть много мест, которые могут создавать эту разницу - 0,25 и 0,75 мс, а также 0,3 и 0,8 мс, 0,5 и 1 мс и т. д. Если все эти возможные местоположения нанести на график, они образуют гиперболическую кривую с центром на базовой линии. Навигационные карты могут быть построены с использованием кривых для выбранных задержек, скажем, каждые 0,1 мс. Затем оператор может определить, на какой из этих линий они лежат, измеряя задержку и глядя на график.
Одно измерение выявляет диапазон возможных мест, а не одно исправление. Решением этой проблемы является простое добавление еще одной вторичной станции в другом месте. В этом случае будут измерены две задержки: одна — разница между первичной и вторичной «А», а другая — между первичной и вторичной «В». Если посмотреть обе кривые задержки на графике, можно найти два пересечения, и одно из них можно выбрать в качестве вероятного местоположения приемника. Это такое же определение, как и в случае с прямыми измерениями времени/расстояния, но гиперболическая система представляет собой не что иное, как обычный радиоприемник, подключенный к осциллографу.
Поскольку вторичный преобразователь не мог мгновенно передать свой сигнальный импульс при получении первичного сигнала, в сигнал была встроена фиксированная задержка. Независимо от того, какая задержка выбрана, в некоторых местах сигнал от двух вторичных устройств будет приниматься одновременно, и, таким образом, их будет трудно увидеть на дисплее. Требовался какой-то метод идентификации одного вторичного компонента от другого. Общие методы включали передачу со вторичного канала только в определенное время, использование разных частот, регулировку огибающей пакета сигнала или передачу нескольких пакетов по определенной схеме. Набор станций, основных и второстепенных, был известен как «цепь». Подобные методы используются для идентификации цепочек в случае, когда в данном месте может быть получено более одной цепочки.
Операционные системы
[ редактировать ]Мейнт Хармс был первым, кто предпринял попытку создания гиперболической навигационной системы, начав с размышлений на эту тему в 1931 году в рамках своего магистерского экзамена в Seefahrtschule Lübeck (Штурманский колледж). Заняв должность профессора математики, физики и навигации в Кайзерторе в Любеке, Хармс попытался продемонстрировать гиперболическую навигацию с использованием простых передатчиков и приемников. 18 февраля 1932 года он получил Reichspatent-Nr. 546000 за свое изобретение. [4] [5]
Давать
[ редактировать ]Первой оперативной гиперболической навигацией был британский самолет Gee , впервые использованный экспериментально бомбардировочным командованием Королевских ВВС в 1941 году. Gee использовался как для бомбардировок Германии, так и для навигации в районе Великобритании, особенно для приземления в ночное время. Несколько сетей Gee были построены в Великобритании, а после войны они расширились до четырех сетей в Великобритании, двух во Франции и одной в северной Германии. В течение периода после создания Международной организации гражданской авиации в 1946 году Gee считалась основой мирового стандарта навигации, но вместо этого была выбрана система всенаправленного диапазона VHF (VOR), и последняя цепь Gee в конечном итоге была отключена. в 1970 году. [6]
Все сигналы из данной цепи передавались на одной частоте. Основная станция отправила два сигнала: сигнал «А», обозначающий начало периода времени, и сигнал «D», который, по сути, представлял собой две буквы «А», обозначающие конец. В каждый период одна из двух вторичных линий отвечала, чередуя свои сигналы «B» и «C». В результате получился шаблон «ABD…ACD…ABD…». Широкополосный приемник использовался для настройки цепочки, а выходные данные отправлялись на осциллограф оператора . Поскольку цепи были расположены близко друг к другу по частоте, чтобы их мог принимать один тюнер, иногда на дисплее появлялись сигналы от нескольких цепей. Чтобы различать цепи в этих случаях, периодически вводился второй сигнал «А», «А1» или «призрак А», и для идентификации цепи можно было использовать образец мигания на дисплее. [6]
Оператор изначально настраивал свой приемник, чтобы увидеть на дисплее поток импульсов, иногда включающий в себя и другие цепи, находящиеся рядом по частоте. Затем они настраивали локальный генератор, который запускал трассировку осциллографа, чтобы он соответствовал часам на основной станции (которые могли меняться и менялись со временем). Затем они использовали переменную задержку, которая добавлялась к сигналу гетеродина, чтобы перемещать весь дисплей вперед или назад так, чтобы один из импульсов «А» находился в самой левой части области видимости (действие идентично « «Горизонтальное удержание» на аналоговом телевидении). Наконец, скорость следа по дисплею будет настроена так, чтобы импульс D был виден только справа. Расстояние между импульсом B или C и импульсом A теперь можно было измерить с помощью прикрепленной шкалы. Полученные задержки затем можно было просмотреть на навигационной карте. [6]
Дисплей был относительно небольшим, что ограничивало разрешение и, следовательно, определение задержки. Была указана точность измерения в 1 микросекунду, что привело к точности определения правильной гиперболы примерно до 150 метров, а когда два таких измерения были объединены, результирующая точность определения составила около 210 метров. На больших дистанциях, например 350 миль, эллипс ошибки составлял примерно 6 на 1 милю. Максимальная дальность составляла около 450 миль, [6] хотя несколько исправлений на большие расстояния были сделаны при необычных обстоятельствах.
Лоран
[ редактировать ]США также рассматривали гиперболическую навигацию еще в 1940 году и начали разработку, известную как «Проект 3», которая была похожа на «Ну и дела». К тому времени, когда они познакомились с Gee, которая уже пошла в производство, прогресс был лишь незначительным. Джи был немедленно выбран в 8-ю воздушную армию , и команда Проекта 3 переключила свое внимание на другие варианты использования, в конечном итоге рассмотрев, конвоев в частности, навигацию .
Новая концепция основывалась на использовании небесных волн , позволяющих принимать импульсы на очень больших расстояниях. Это давало значительно более сложные принимаемые сигналы, чем система прямой видимости Джи, и их было труднее интерпретировать. Однако, за этим исключением, две системы были очень похожи по концепции и сильно различались выбором частоты и деталями синхронизации импульсов. Роберт Дж. Диппи , изобретатель Джи, переехал в США в середине 1942 года, чтобы помочь с деталями наземных станций. За это время он потребовал создать бортовую версию приемников, взаимозаменяемую с Gee. В результате появилась система LORAN , что означает «Дальняя навигация», и первая цепочка из двух станций была запущена в эксплуатацию в июне 1942 года. [7] ЛОРАН стал ЛОРАН-А , когда началась разработка его замены. Первоначально это была концепция ЛОРАН-Б, но в конечном итоге, начиная с 1957 года, она была заменена ЛОРАН-С очень дальнего действия.
В конечном итоге LORAN выбрал 1,950 МГц в качестве основной рабочей частоты. Частота 7,5 МГц была выбрана для дневного использования в качестве дополнительного канала, но никогда не использовалась в эксплуатации. По сравнению с дальностью полета Джи по воздуху в 450 миль (720 км), у LORAN дальность полета составляла около 1500 миль (2400 км) по воде и 600 миль (970 км) по суше. Работа в целом была аналогична Gee, но одновременно отображался только один из второстепенных сигналов. Исправление требовало, чтобы оператор измерял одну задержку, затем другую, а затем смотрел полученные задержки на графиках. Это был трудоемкий процесс, который мог занять несколько минут, в течение которых транспортное средство двигалось. Точность была указана как 1% от диапазона. [7]
ЛОРАН использовал два метода для идентификации цепочки. Одна была рабочая частота, с четырьмя «каналами», как в Джи. Вторым была частота повторения импульсов: «высокая», «низкая» и «медленная». Это позволило создать до 12 сетей в любой заданной области. Кроме того, первоначально устойчивое повторение импульсов было позже изменено для создания еще восьми уникальных шаблонов, что позволило создать в общей сложности 96 пар станций. Любая сеть может использовать одну или несколько пар станций, что требует большого количества уникальных сигналов для широкого покрытия. [7]
Декка Навигатор
[ редактировать ]Навигационная система Decca была первоначально разработана в США, но в конечном итоге была внедрена компанией Decca Radio в Великобритании и обычно называется британской системой. Первоначально разработанный для Королевского флота как точное дополнение к военно-морским версиям Gee, Decca впервые был использован 5 июня 1944 года для управления тральщиками при подготовке к вторжению в день «Д» . Система была разработана после войны и составила конкуренцию GEE и другим системам гражданского назначения. По ряду причин, в частности простоте использования, он широко использовался до 1990-х годов в 42 сетях по всему миру. Ряд станций был обновлен в 1990-х годах, но широкое использование GPS привело к отключению Decca в полночь 31 марта 2000 года. [8] [9]
Decca была основана на сравнении фаз непрерывных сигналов, а не синхронизации их импульсов. Это было более точно, поскольку фазу пары сигналов можно было измерить с точностью до нескольких градусов, в случае Decca – четырех градусов. Эта значительно улучшенная собственная точность позволила Decca использовать гораздо более длинные волны, чем Gee или LORAN, сохраняя при этом тот же уровень точности. Использование более длинных волн дало лучшее распространение, чем Gee или LORAN, хотя дальность действия базовой системы обычно ограничивалась примерно 500 милями.
Еще одним преимуществом является то, что относительную фазу двух сигналов легко отобразить с помощью простых электромеханических датчиков. В отличие от Gee и LORAN, которые требовали использования осциллографов для измерения времени сигнала, Decca использовала серию из трех механических указателей, которые стоили гораздо дешевле, занимали меньше места и позволяли одновременно проверять три сигнала. Это сделало Decca намного дешевле и проще в использовании.
У Decca был свойственный недостаток: сигнал мог меняться только на 360 градусов, и эта закономерность повторялась по кругу вокруг станций. Это означало, что существовало большое количество мест, которые соответствовали конкретному измерению фазы, - проблема, известная как «неоднозначность фазы». В то время как Джи и ЛОРАН зафиксировали вас в одном из двух мест, Декка зафиксировала вас в одном из сотен. Поскольку неоднозначные области расходились от станций и имели конечную ширину, они стали известны как «переулки».
Decca решила эту проблему за счет использования дисплея, напоминающего одометр, известного как «деметры». Перед тем как отправиться в путешествие, навигатор устанавливал счетчик полос деметра в известное положение. По мере движения корабля стрелка циферблата вращалась и увеличивала или уменьшала счетчик, когда он проходил мимо нуля. Комбинация этого числа и текущих показаний шкалы позволяла навигатору напрямую считывать текущую задержку и искать ее на карте, что гораздо проще, чем Джи или ЛОРАН. Пользоваться им было настолько проще, что Decca позже добавила функцию автоматического построения диаграмм, которая формировала движущуюся карту . Более поздние дополнения к цепочке сигналов позволили рассчитывать зону и полосу напрямую, устраняя необходимость ручной настройки счетчиков полос и делая систему еще проще в использовании. [9]
Поскольку каждый первичный и вторичный сигнал передавался на разной частоте, одновременно можно было измерить любое количество задержек; на практике для получения трех результатов использовались один первичный и три вторичных. Поскольку каждый сигнал посылался на разной частоте, все три, известные как «зеленый», «красный» и «фиолетовый», одновременно декодировались и отображались на трех деметрах. Вторичные сигналы были физически распределены под углом 120 градусов друг к другу, что позволяло оператору выбирать на дисплее пару сигналов, отправленных со станций, как можно ближе к прямому углу к приемнику, что еще больше повышало точность. Максимальная точность обычно оценивалась в 200 ярдов, хотя при этом возможны эксплуатационные ошибки. [9]
Помимо большей точности и простоты использования, Decca также больше подходила для использования на суше. Задержки из-за рефракции могут оказывать существенное влияние на синхронизацию импульсов, но в гораздо меньшей степени — на изменения фазы. Таким образом, Decca оказалась в большом спросе на использование вертолетов , где средства захода на посадку на взлетно-посадочной полосе, такие как ILS и VOR, не подходили для небольших аэродромов и, по сути, случайных мест, где использовались самолеты. Серьезным недостатком Decca было то, что она была восприимчива к шуму, особенно от молний . Это не представляло серьезной проблемы для кораблей, которые могли позволить себе переждать штормы, но делало его непригодным для дальней воздушной навигации, где время имело решающее значение. Для этой роли было представлено несколько версий Decca, в частности DECTRA и DELRAC, но они не получили широкого распространения. [10] [11]
ЛОРАН-С
[ редактировать ]LORAN-A был разработан для быстрого создания на базе Gee, и его рабочая частота была выбрана исходя из сочетания необходимости большой дальности полета над водой и выбранной минимальной точности. Использование гораздо более низких частот, в кГц вместо МГц, значительно расширит радиус действия системы. Однако точность определения является функцией длины волны сигнала, которая увеличивается на более низких частотах - другими словами, использование более низкой частоты обязательно снизит точность системы. Надеясь на лучшее, первые эксперименты с «LF Loran» вместо этого показали, что точность оказалась намного хуже, чем предполагалось, и усилия в этом направлении были прекращены. [12] Последовали несколько неудачных низкочастотных попыток, включая подобные Decca концепции Cyclan и Navarho. Ни один из них не дал реального преимущества перед Decca; они либо предлагали немного улучшенную дальность, либо лучшую дальность, но слишком низкую точность, чтобы быть полезными.
Ну и дела и ЛОРАН-А стали возможны благодаря развитию осциллографа – до этого точное измерение времени было невозможно. LORAN-C стал возможен благодаря разработке недорогой системы фазовой автоподстройки частоты (ФАПЧ) в 1950-х годах. ФАПЧ создает устойчивый выходной сигнал с той же частотой и фазой, что и входной сигнал, даже если этот входной сигнал является периодическим или плохо принимается. В данном случае важной особенностью было то, что система ФАПЧ позволяла восстанавливать непрерывный сигнал из ряда коротких импульсов. Система, использующая ФАПЧ, может принимать одиночный импульсный сигнал, как в Gee, а затем восстанавливать непрерывный тон для измерения фазы, как в Decca.
Повторно используя передатчики Cyclan, ВМС США начали эксперименты с такой системой в середине 1950-х годов и включили ее на постоянной основе в 1957 году. За этим последовали многочисленные сети, которые в конечном итоге обеспечили глобальное покрытие вблизи союзников и объектов США. [12] Хотя он и был менее точен, чем Decca, он предлагал сочетание разумной точности и большой дальности действия, сочетание, которое устарело почти все другие системы, использовавшиеся тогда, и привело к их постепенному отказу. LORAN-C оставался в эксплуатации вплоть до эры спутниковой навигации, пока GPS окончательно не привел к его отключению 8 февраля 2010 года. [13]
В базовой операции измерение представляло собой двухэтапный процесс. Сигналы сначала настраивались и выстраивались на экране аналогично Gee, при этом положение точек использовалось для приблизительной оценки местоположения. Это измерение было достаточно точным, чтобы разместить транспортное средство в пределах определенной полосы движения. Затем оператор сильно увеличивал изображение до тех пор, пока не мог видеть меняющийся сигнал внутри точек, а затем использовал сравнение фаз, чтобы точно выровнять время.
На низких частотах и больших расстояниях было бы трудно понять, смотрите ли вы на текущую фазу сигналов непосредственно со станций или сравниваете один прямой сигнал с сигналом, полученным цикл назад, или, возможно, с сигналом, отраженным от ионосферы . Чтобы уменьшить эту двусмысленность, необходима некоторая форма вторичной информации. LORAN-C достиг этого, отправляя уникальные детали в импульсах, чтобы каждую станцию можно было однозначно идентифицировать. [14]
Сигнал начинался, когда основная трансляция осуществлялась последовательностью из девяти импульсов, при этом точное время между каждым импульсом использовалось для идентификации станции. Затем каждая из вторичных станций отправила свои собственные сигналы, состоящие из восьми импульсов одинаковой идентификационной схемы. Приемники могли бы использовать тайминги сигнала для выбора цепочек, идентификации вторичных сигналов и отклонения сигналов, отраженных от ионосферы. [14]
Цепочки LORAN-C были организованы в главную станцию M и до пяти вторичных станций V, W, X, Y, Z. Все они транслировались на частоте 100 кГц, что намного ниже частоты, чем более ранние системы. Результатом стал сигнал, который обеспечивал дневную дальность земных волн в 2250 миль, ночную земную волну в 1650 миль и небесные волны в 3000 миль. Точность синхронизации оценивалась в 0,15 микросекунды, что обеспечивает точность порядка 50–100 метров. В реальных условиях Береговая охрана указала, что абсолютная точность составляет 0,25 морской мили или лучше. [15]
Омега
[ редактировать ]Одна из последних гиперболических навигационных систем, поступивших в эксплуатацию, была одной из первых разработанных; Omega ведет свою историю с работы Джона Элвина Пирса в 1940-х годах, работая над той же основной идеей, что и система фазового сравнения Decca. Он придумал систему специально для глобальной навигации средней точности и поэтому выбрал в качестве основы сигнала чрезвычайно низкую частоту 10 кГц. Однако проблема с фазовой неоднозначностью, как в случае с Decca, означала, что в то время система была непрактична.
Основной проблемой была синхронизация станций. Станции «Джи» и «ЛОРАН» находились достаточно близко, чтобы вторичные станции могли сработать, когда услышали сигнал от первичной, но в глобальной системе станции могли быть не видны друг другу, особенно когда атмосфера была несовместима. Решение этой проблемы было предложено в 1955 году в виде цезиевых атомных часов . Они обеспечивали достаточную точность, чтобы их можно было синхронизировать на заводе, доставлять к местам расположения передатчиков и оставлять работающими в течение многих лет без необходимости повторной синхронизации. Прежде чем они стали практичными, потребовались значительные разработки, но эти проблемы в основном были решены к 1960-м годам.
Это оставило еще одну проблему; Системы сравнения фаз такого типа неоднозначны и нуждаются в какой-то другой системе, чтобы определить, на какой полосе они находятся. Эта проблема также решалась путем разработки инерциальных навигационных систем (ИНС). Даже ранние модели конца 1950-х годов обеспечивали точность в пределах нескольких миль, чего было достаточно для определения полосы движения.
Эксперименты над этой концепцией продолжались на протяжении 1950-х и 60-х годов, параллельно с разработкой Decca почти идентичной системы DELRAC. Лишь в 1960-е годы, когда ледокольные баллистические подводные лодки стали главной силой сдерживания, возникла острая необходимость в такой системе. ВМС США санкционировали полное развертывание в 1968 году, а в 1983 году был достигнут полный набор из 8 станций. «Омега» также оказалась одной из самых недолговечных систем: она закрылась 20 сентября 1997 года. [16]
Станции «Омега» передают непрерывный сигнал в определенный временной интервал. Атомные часы также гарантировали, что их сигналы передаются с правильной частотой и фазой; в отличие от предыдущих систем, Omega не требовалось иметь первичное/вторичное устройство, поскольку часы были достаточно точными, чтобы запускать сигналы без внешней ссылки. Чтобы начать последовательность, станция в Норвегии сначала вела вещание на частоте 10,2 кГц в течение 0,9 секунды, затем выключалась на 0,2 секунды, затем вещала на частоте 13,6 кГц в течение 1,0 секунды, повторяя эту схему. Каждая станция передала серию из четырех таких сигналов длительностью около секунды каждый, а затем молчала, пока наступала очередь других станций. В любой момент времени три станции будут вещать одновременно на разных частотах. Приемники выбирали набор станций, наиболее подходящих для данного местоположения, а затем ждали появления сигналов этих станций в течение 10-секундной цепочки. Затем расчет исправления происходил точно так же, как и Decca, хотя гораздо более низкая рабочая частота приводила к гораздо меньшей точности. Карты Omega имеют точность от 2 до 4 морских миль. [16]
ВОТ И ВСЕ
[ редактировать ]«ЧАЙКА» является советским аналогом «ЛОРАН-С» и действует по тем же принципам и с той же частотой. Он отличается прежде всего деталями огибающих импульсов. На территории бывшего Советского Союза существует пять сетей «ЧАЙКА», каждая из которых имеет основную и от двух до четырех второстепенных сетей.
Альфа
[ редактировать ]«Альфа», более правильно известная под советским названием РСДН-20, по сути, представляет собой версию «Омеги», развернутую в бывшем Советском Союзе начиная с 1962 года. Первоначальная система использовала только три передатчика, работающих примерно по линии в Краснодаре, Ревде и Новосибирске. позже стала основной станцией. В 1991 году появились еще две станции в Хабаровске и Сейде. Станции используют частоты от 11 до 14 кГц. [17]
Спутниковые навигационные системы
[ редактировать ]Двумя усложняющими факторами для систем спутниковой навигации являются: (1) передающие станции (спутники) движутся; и (2) спутниковые передачи GPS синхронизируются с UTC (с опубликованным смещением), что обеспечивает точное время. Пункт (1) требует, чтобы координаты спутника были известны как функция времени (включены в широковещательные сообщения). Пункт (2) позволяет системам спутниковой навигации предоставлять информацию о времени и местоположении, но требует более сложного алгоритма решения. Однако это технические отличия от наземных гиперболических систем, а не принципиальные отличия. [18] [19]
См. также
[ редактировать ]Ссылки
[ редактировать ]- ^ Токио, Университет. «Исследования показывают, что подземная навигация может быть возможна с помощью космических лучей-мюонов» . techxplore.com . Архивировано из оригинала 15 июня 2023 г. Проверено 20 июня 2023 г.
- ^ Танака, Хироюки К.М.; Галло, Джузеппе; Джон, Глуяс; Камошида, Осаму; Ло Прести, Доменико; Симидзу, Такаши; Штайгервальд, Сара; Такано, Кодзи; Ян, Юйчэн; Ёкота, Юсуке; Сотрудничество MuPS (21 июля 2023 г.). «Первая навигация с помощью беспроводной мюометрической навигационной системы (MuWNS) в помещениях и под землей» . СеллПресс (7). дои : 10.1016/j.isci.2023.107000 . Проверено 30 июля 2024 г.
- ^ «Точность часов в ppm» . ТрониксБенч . nd Архивировано из оригинала 20 апреля 2024 г. Проверено 30 июля 2024 г.
- ^ Любекское морское училище (1983 г.). 175 лет Любекскому морскому училищу (на немецком языке). Любек: Любекская морская школа. OCLC 75315255 .
- ^ Jump up to: а б с д Бланшар, WF (nd). Прок, Джерри (ред.). «СИСТЕМА ГИ» . jproc.ca . Архивировано из оригинала 25 января 2024 г. Проверено 30 июля 2024 г.
- ^ Jump up to: а б с Прок, Джерри (22 октября 2021 г.). «Лоран-А» . jproc.ca . Архивировано из оригинала 30 июля 2024 г. Проверено 30 июля 2024 г.
- ^ Прок, Джерри; Паркер, Мэтью (08 октября 2023 г.). «ДЕККА НАВИГАТОР – ИСТОРИЯ» . jproc.ca . Архивировано из оригинала 20 мая 2024 г. Проверено 30 июля 2024 г.
- ^ Jump up to: а б с Прок, Джерри; Паркер, Мэтью (26 января 2008 г.). «ДЕККА НАВИГАТОР – ОБЗОР» . jproc.ca . Архивировано из оригинала 30 июля 2024 г. Проверено 30 июля 2024 г.
- ^ Прок, Джерри (14 сентября 2012 г.). «ДЕКТРА» . jproc.ca . Архивировано из оригинала 25 января 2024 г. Проверено 30 июля 2024 г.
- ^ Прок, Джерри (29 октября 2018 г.). «ДЕЛЬРАК» . jproc.ca . Архивировано из оригинала 25 января 2024 г. Проверено 30 июля 2024 г.
- ^ Jump up to: а б Прок, Джерри; МакЭлрой, Гил (31 марта 2016 г.). «История Лоран-С» . jproc.ca . Архивировано из оригинала 17 мая 2024 г. Проверено 30 июля 2024 г.
- ^ Прок, Джерри; Герман, Джеффри (15 апреля 2019 г.). «Замыкание Лоран-С» . jproc.ca . Архивировано из оригинала 30 июля 2024 г. Проверено 30 июля 2024 г.
- ^ Jump up to: а б Прок, Джерри; Кордвелл, Алан (24 сентября 2006 г.). «Лоран-С — Характеристики сигнала» . jproc.ca . Архивировано из оригинала 22 апреля 2024 г. Проверено 30 июля 2024 г.
- ^ «ЛОРАН-С Общая информация» . uscg.gov . Береговая охрана США. nd Архивировано из оригинала 26 января 2013 г.
Система обеспечивала абсолютную точность более 0,25 морской мили для пользователей с соответствующим оборудованием в опубликованных зонах.
- ^ Jump up to: а б Прок, Джерри (14 мая 2018 г.). «Омега» . jproc.ca . Архивировано из оригинала 11 мая 2024 г. Проверено 30 июля 2024 г.
- ^ Абель, Дж.С.; Чаффи, JW (сентябрь 1991 г.). «Существование и уникальность GPS-решений». Транзакции IEEE по аэрокосмическим и электронным системам . 27 (6): 748–753. дои : 10.1109/7.104271 . OCLC 5871873879 .
- ^ Фанг, BT (октябрь 1992 г.). «Комментарии Дж. С. Абеля и Дж. У. Чаффи к статье «Существование и уникальность решений GPS». Транзакции IEEE по аэрокосмическим и электронным системам . 28 (4). дои : 10.1109/7.165379 . OCLC 5872033996 .
| Базы данных органов управления : Национальные |
|---|