Мультилатерация псевдодальности
этой статьи Начальный раздел может оказаться слишком длинным . ( март 2022 г. ) |
Мультилатерация псевдодальности , часто просто мультилатерация ( MLAT ), когда она находится в контексте, представляет собой метод определения положения неизвестной точки, такой как транспортное средство, на основе измерения времени прибытия (TOA) энергетических волн, перемещающихся между неизвестными. точка и несколько станций в известных местах. Когда волны передаются транспортным средством, MLAT используется для наблюдения ; когда волны передаются станциями, для навигации используется MLAT ( гиперболическая навигация ). В любом случае предполагается, что часы станций синхронизированы, а часы автомобиля — нет.
До вычисления решения общее время передачи (TOT) волн неизвестно приемнику(ам) ни на транспортном средстве (один приемник, навигация), ни на станциях (несколько приемников, наблюдение). Следовательно, также неизвестно время полета волны (TOF) – дальность полета аппарата от станций, деленная на скорость распространения волны. Каждая псевдодальность представляет собой соответствующее значение TOA, умноженное на скорость распространения с добавлением той же произвольной константы (представляющей неизвестный TOT).
В навигационных приложениях транспортное средство часто называют «пользователем»; в приложениях для наблюдения транспортное средство можно назвать «целью». Для математически точного решения диапазоны не должны меняться в течение периода приема сигналов (между первым и последним, пришедшим на приемник). Таким образом, для навигации точное решение требует неподвижного транспортного средства; однако мультилатерация часто применяется для навигации движущихся транспортных средств, скорость которых значительно меньше скорости распространения волн.
Если - количество рассматриваемых физических измерений (таким образом, искомые координаты транспортного средства) и — количество полученных сигналов (таким образом, измеренных TOA), требуется, чтобы . Тогда основной набор уравнения измерения:



- в ТОА ( измерения) = TOF ( неизвестные переменные, встроенные в выражения) + TOT (одна неизвестная переменная реплицируется раз).
Обработка обычно требуется для извлечения TOA или их отличий из полученных сигналов, а алгоритм для решения этого набора уравнений обычно требуется . Алгоритм либо: (а) определяет числовые значения для TOT (для часов приемника(ов)) и координаты автомобиля; или (б) игнорирует ТОТ и формирует (по меньшей мере ) разница во времени прибытия (TDOA), которая используется для нахождения координаты автомобиля. Почти всегда, (например, плоскость или поверхность сферы) или (например, реальный физический мир). Системы, образующие TDOA, также называются гиперболическими системами. [1] по причинам, обсуждаемым ниже.



Мультилатерационная навигационная система предоставляет информацию о местоположении транспортного средства объекту, находящемуся «на» транспортном средстве (например, пилоту воздушного судна или оператору приемника GPS). Многолатерационная система наблюдения предоставляет информацию о местоположении транспортного средства объекту, «не находящемуся» в транспортном средстве (например, авиадиспетчеру или оператору сотовой связи). По принципу взаимности любой метод, который можно использовать для навигации, можно использовать и для наблюдения, и наоборот (используется одна и та же информация).
Системы были разработаны как для алгоритмов TOT, так и для TDOA (которые игнорируют TOT). В этой статье в первую очередь рассматриваются алгоритмы TDOA, поскольку они были реализованы первыми. Благодаря технологиям, доступным в то время, системы TDOA часто определяли местоположение транспортного средства в двух измерениях. Системы ТОТ рассматриваются на втором месте. Они были реализованы примерно после 1975 года и обычно связаны со спутниками. Благодаря развитию технологий алгоритмы TOT обычно определяют местоположение пользователя/транспортного средства в трех измерениях. Однако концептуально алгоритмы TDOA или TOT не связаны с количеством задействованных измерений.
Фон
[ редактировать ]Определение мультилатерации
[ редактировать ]До развертывания GPS и других глобальных навигационных спутниковых систем (ГНСС) системы мультилатерации псевдодальности часто определялись как (синонимы) системы TDOA, т.е. системы, которые измеряли TDOA или формировали TDOA в качестве первого шага в обработке набора измеренных данных. ТОА. Однако в результате развертывания ГНСС (которые должны определять ТОТ) возникли два вопроса: а) К какому типу системы относятся ГНСС (мультилатерация псевдодальностей, мультилатерация истинной дальности или другой тип системы)? (b) Каковы определяющие характеристики мультилатерационной системы псевдодальности? (Не существует развернутых многолатеральных систем наблюдения, определяющих ТОТ, но они были проанализированы. [2] )
- Технический ответ на вопрос (а) давно известен: ГНСС представляют собой разновидность (или подвид) многолатеральных навигационных систем, имеющих движущиеся передатчики. [3] [4] Однако, поскольку передатчики синхронизированы не только друг с другом, но и со стандартом времени, приемники ГНСС также являются источниками информации о времени. Для этого требуются другие алгоритмы решения, чем в системах TDOA. Таким образом, можно также предположить, что ГНСС представляют собой отдельную категорию систем.
- На вопрос (б) нет авторитетного ответа. Однако разумный ответ, состоящий из двух частей: (1) система, единственными измерениями которой являются TDOA или TOA (или, если учитывать скорость распространения, измеряются только псевдодальности ); и (2) система, часы станции которой должны быть синхронизированы . (Примечание: в этом определении требуется распространение волн.) Это определение используется здесь и включает в себя как GNSS, так и системы TDOA. Системы TDOA явно гиперболичны, а системы TOA неявно гиперболичны.
Обзор приложений
[ редактировать ]Мультилатерационные системы псевдодальности разработаны для волн, движущихся по прямолинейным и криволинейным земным траекториям, и практически для всех волновых явлений — электромагнитных (различные частоты и формы сигналов), акустических (звуковых или ультразвуковых, в воде или воздухе), сейсмических и т. д. Метод мультилатерации, по-видимому, впервые был использован во время Первой мировой войны для определения источника артиллерийского огня с помощью звуковых волн (наблюдение TDOA). Многолатеральное наблюдение связано с локализацией (но не идентификацией) цели пассивной буксируемой гидроакустической решеткой , которая также впервые была использована во время Первой мировой войны.
Радионавигационные системы на большие расстояния стали жизнеспособными во время Второй мировой войны с развитием радиотехнологий. Примерно в 1950–2000 годах мультилатерация TDOA была обычным методом в наземных радионавигационных системах, где она была известна как гиперболическая навигация . Эти системы относительно нетребовательны к пользовательскому приемнику, поскольку его «часы» могут иметь низкую производительность/стоимость и обычно не синхронизированы со временем станции. [5] Разницу во времени принимаемого сигнала можно даже визуально измерить с помощью осциллографа . Внедрение микропроцессора значительно упростило работу, что привело к увеличению его популярности в 1980-х годах. Самой популярной гиперболической навигационной системой TDOA была Loran-C , которая использовалась по всему миру, пока система не была практически отключена.
Разработка атомных часов для синхронизации удаленных друг от друга станций сыграла важную роль в развитии GPS и других ГНСС. Широкое использование спутниковых навигационных систем, таких как система глобального позиционирования (GPS), сделало наземные навигационные системы TDOA в значительной степени ненужными, и большинство из них было выведено из эксплуатации. Благодаря своей высокой точности и низкой стоимости пользовательского оборудования сегодня мультилатерация является концепцией, чаще всего выбираемой для новых систем навигации и наблюдения, например, для наблюдения за летающими (альтернативными радиолокационными) и рулежными (альтернативными визуальным) самолетами. [6] [7] [8]
Мультилатерация обычно используется в гражданских и военных целях либо (а) для определения местоположения транспортного средства (самолета, корабля, автомобиля/грузовика/автобуса или оператора беспроводной телефонной связи) путем измерения TOA сигнала от транспортного средства на нескольких станциях, имеющих известные координаты и синхронизированных «часы» (приложение наблюдения) или (b) позволяют транспортному средству определять свое местоположение относительно нескольких передатчиков (станций) в известных местах и иметь синхронизированные часы на основе измерений сигналов TOA (навигационное приложение). Когда станции прикреплены к Земле и не обеспечивают время, измеренные TOA почти всегда используются для формирования на один TDOA меньше.
Для транспортных средств государственные учреждения часто предоставляют станции наблюдения или навигации (включая необходимую сопутствующую инфраструктуру). Однако организации, финансируемые из частных источников, также были (и являются) поставщиками станций/систем, например, поставщиками услуг беспроводной связи. [9] Мультилатерация также используется научными и военными сообществами для наблюдения без сотрудничества.
Преимущества и недостатки
[ редактировать ]В следующей таблице суммированы преимущества и недостатки мультилатерации псевдодальности, особенно по сравнению с измерениями истинной дальности .
| Преимущества | Недостатки |
|---|---|
|
|

Преимущества систем, использующих псевдодальности, в значительной степени приносят пользу транспортному средству/пользователю/цели. Недостатки во многом обременяют поставщика системы.
Принцип
[ редактировать ]Частоты и формы сигналов
[ редактировать ]системы псевдодальности, Были разработаны мультилатерационные навигационные использующие различные радиочастоты и формы сигналов — низкочастотные импульсы (например, «Лоран-С»); низкочастотные непрерывные синусоиды (например, Decca); высокочастотный непрерывный широкополосный доступ (например, GPS). псевдодальностей В системах мультилатерационного наблюдения часто используются существующие импульсные передатчики (если они подходят) — например, Shot-Spotter, ASDE-X и WAM.
Координатная система
[ редактировать ]Практически всегда система координат выбирается исходя из траекторий волн. Таким образом, чаще всего выбираются двух- или трехмерные декартовы системы координат, основанные на прямолинейном (прямолинейном) распространении волн. Однако полярные иногда используются (также называемые круговыми/сферическими) кадры, чтобы согласовать с изогнутыми путями распространения волн на земной поверхности. Учитывая тип кадра, можно выбрать начало координат и ориентацию осей, например, в зависимости от местоположения станции. Стандартные преобразования систем координат можно использовать для размещения результатов в любой желаемой системе координат. Например, приемники GPS обычно вычисляют свое положение, используя прямоугольные координаты, а затем преобразуют результат в широту, долготу и высоту.
Формирование TDOA
[ редактировать ]Данный принимаемые сигналы, системы TDOA формируют различия пар TOA (см. «Расчет TDOA или TOA по принятым сигналам» ниже). Все полученные сигналы должны быть членами хотя бы одной пары TDOA, но в противном случае используемые различия являются произвольными (любые два из нескольких наборов TDOA могут быть связаны обратимым линейным преобразованием). Таким образом, при формировании TDOA порядок двух задействованных TOA не важен.
Некоторые действующие системы TDOA (например, Loran-C) назначают одну станцию «ведущей» и формируют свои TDOA как разницу TOA ведущего и TOA «вторичных» станций. Когда , есть возможные комбинации TDOA, каждая из которых соответствует станции, которая де-факто является ведущей. Когда , есть возможные наборы TDOA, из которых не имеют фактического хозяина. Когда , есть возможные наборы TDOA, из которых не имеют фактического хозяина.








Принцип TDOA/наблюдение
[ редактировать ]Если импульс излучается транспортным средством, он, как правило, приходит в несколько разное время на пространственно разнесенные приемники, причем разные значения TOA обусловлены разным расстоянием каждого приемника от транспортного средства. Однако для заданных местоположений любых двух приемников набор местоположений излучателей будет давать одинаковую разницу во времени (TDOA). Учитывая два местоположения приемника и известный TDOA, местоположение возможных местоположений излучателя составляет половину двухполостного гиперболоида .

Проще говоря, при наличии двух приемников в известных местах излучатель может быть расположен на одном гиперболоиде (см. рисунок 1). [10] Обратите внимание, что получателям не нужно знать абсолютное время передачи импульса – нужна только разница во времени. Однако для формирования полезного TDOA из двух измеренных TOA часы приемника должны быть синхронизированы друг с другом.
Рассмотрим теперь третий приемник в третьем месте, который также имеет синхронизированные часы. Это обеспечит третье независимое измерение TOA и второй TDOA (есть третий TDOA, но он зависит от первых двух TDOA и не дает дополнительной информации). Излучатель расположен на кривой, определяемой двумя пересекающимися гиперболоидами. Четвертый приемник необходим для еще одного независимого TOA и TDOA. Это даст дополнительный гиперболоид, пересечение кривой с этим гиперболоидом дает одно или два решения, тогда излучатель располагается в одном из двух решений.
При четырех синхронизированных приемниках имеется три независимых TDOA, и для точки в трехмерном пространстве необходимы три независимых параметра. (И для большинства созвездий три независимых TDOA все равно дадут две точки в трехмерном пространстве).С помощью дополнительных приемников можно получить повышенную точность. (В частности, для GPS и других ГНСС атмосфера влияет на время распространения сигнала, и большее количество спутников дает более точное местоположение).Для переопределенной группировки (более 4 спутников/TOA) наименьших квадратов для «уменьшения» ошибок можно использовать метод . Усреднение за более длительные периоды времени также может повысить точность.
Точность также улучшается, если приемники размещены в конфигурации, которая минимизирует ошибку оценки положения. [11]
Эмитент может участвовать или не участвовать в процессе многолатерального наблюдения. Таким образом, многолатеральное наблюдение используется как с несотрудничающими «пользователями» в военных и научных целях, так и с сотрудничающими пользователями (например, на гражданском транспорте).
Принцип TDOA/навигация
[ редактировать ]Мультилатерация также может использоваться одним приемником для определения своего местоположения путем измерения сигналов, излучаемых синхронизированными передатчиками в известных местах (станциях). Для двумерной навигации необходимо как минимум три излучателя (например, поверхность Земли); для трехмерной навигации необходимо как минимум четыре излучателя. Хотя это и не верно для реальных систем, в пояснительных целях каждый из излучателей можно рассматривать как транслирующий узкие импульсы (в идеале, импульсы) в одно и то же время на разных частотах (во избежание помех). В этой ситуации приемник измеряет TOA импульсов. В реальных системах TDOA полученные сигналы перекрестно коррелируются с репликой без задержки для извлечения псевдозадержки, затем сравниваются с тем же расчетом для другой станции и умножаются на скорость распространения для создания разницы в дальности.
Чтобы избежать самовмешательства, было реализовано несколько методов. Историческим примером является британская система Decca , разработанная во время Второй мировой войны. Decca использовала разность фаз трех передатчиков. Позже Omega развила этот принцип. В Loran-C , представленном в конце 1950-х годов, все передатчики передают импульсы на одной и той же частоте с разными, небольшими временными задержками. ГНСС непрерывно передают данные на одной и той же несущей частоте, модулированной разными псевдослучайными кодами (GPS, Galileo, обновленная ГЛОНАСС).
ВСЕ принцип
[ редактировать ]
Концепция ТОТ проиллюстрирована на рисунке 2 для функции наблюдения и плоского сценария ( ). Самолет А, координаты , передает последовательность импульсов во время . Трансляция принимается на станциях , и время от времени , и соответственно. На основе трех измеренных значений TOA алгоритм обработки вычисляет оценку TOT. , по которому можно рассчитать расстояние между самолетом и станциями. Координаты самолета потом находят.








Когда алгоритм вычисляет правильный TOT, три вычисленных диапазона имеют общую точку пересечения, которая является местоположением самолета (сплошные круги на рисунке 2). Если вычисленный TOT находится после фактического TOT, вычисленные диапазоны не имеют общей точки пересечения (пунктирные кружки на рисунке 2). Понятно, что можно найти итерационный алгоритм ТОТ. Фактически, GPS была разработана с использованием итеративных алгоритмов TOT. Алгоритмы ТОТ закрытой формы были разработаны позже.
Алгоритмы ТОТ стали важными с развитием GPS. ГЛОНАСС и Галилео используют схожие концепции. Основным усложняющим фактором для всех ГНСС является то, что станции (передатчики на спутниках) постоянно перемещаются относительно Земли. Таким образом, чтобы вычислить свое собственное положение, навигационный приемник пользователя должен знать местоположения спутников в момент передачи информации во временной шкале приемника (которая используется для измерения TOA). Для этого: (1) в широковещательные сообщения включаются траектории спутников и TOT во временных масштабах спутников; и (2) пользовательские приемники находят разницу между своим TOT и TOT спутникового вещания (так называемое смещение или смещение часов). Спутниковые часы GPS синхронизируются с UTC (с точностью до опубликованного смещения в несколько секунд), а также друг с другом. Это позволяет GPS-приемникам предоставлять время UTC в дополнение к своему местоположению.
Геометрия измерения и связанные с ней факторы
[ редактировать ]Прямоугольные/декартовы координаты
[ редактировать ]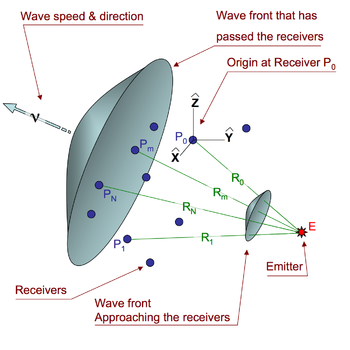
Рассмотрим эмиттер (E на рисунке 3) с неизвестным вектором местоположения.

который мы хотим найти (проблема наблюдения). Источник находится в радиусе действия приемники в известных местах


Нижний индекс относится к любому из получателей:



Расстояние ( ) от излучателя к одному из приемников по координатам

| ( 1 ) |

Для некоторых алгоритмов решения математические вычисления упрощаются путем размещения начала координат в одном из приемников ( P 0 ), что делает его расстояние до излучателя
| ( 2 ) |

Сферические координаты
[ редактировать ]Низкочастотные радиоволны повторяют кривизну Земли ( траектории большого круга ), а не прямые линии. В этой ситуации уравнение 1 недействительно. Лоран-С [12] и Омега [13] являются примерами систем, использующих сферические диапазоны. Если сферическая модель Земли удовлетворительна, самое простое выражение для центрального угла (иногда называемого геоцентрическим углом ) между транспортным средством и я станция



где широты обозначены , а долготы обозначаются . Альтернативные эквивалентные выражения с лучшим числовым поведением можно найти в навигации по большому кругу .


Расстояние от автомобиля до станции i по большому кругу тогда будет

где предполагаемый радиус Земли , а выражается в радианах.

Время передачи (смещение или смещение часов пользователя)
[ редактировать ]До появления ГНСС определение TOT (как известно приемнику) или его эквивалента в контексте навигации, т.е. сдвига между часами приемника и передатчика, не имело большого значения. Более того, когда эти системы разрабатывались, вычислительные ресурсы были весьма ограничены. Следовательно, в этих системах (например, Loran-C, Omega, Decca) приемники рассматривали TOT как мешающий параметр и устраняли его путем формирования различий TDOA (отсюда они были названы TDOA или системами с разностью дальностей). Это упрощенные алгоритмы решения. Даже если TOT (во времени приемника) был необходим (например, для расчета скорости транспортного средства), TOT можно было найти по одному TOA, местоположению соответствующей станции и вычисленному местоположению транспортного средства.
С появлением GPS, а затем и других спутниковых навигационных систем: (1) ТОТ, известный пользователю-приемнику, предоставляет необходимую и полезную информацию; и (2) вычислительная мощность значительно возросла. Спутниковые часы GPS синхронизированы не только друг с другом, но и с универсальным координированным временем (UTC) (с опубликованным смещением), и их местоположение известно относительно UTC. Таким образом, алгоритмы, используемые для спутниковой навигации, одновременно определяют положение приемника и сдвиг его часов (эквивалент TOT). Затем часы приемника настраиваются так, чтобы их TOT соответствовал TOT спутника (который известен из сообщения GPS). Находя смещение часов, приемники GNSS являются источником времени, а также информации о местоположении. Вычисление TOT представляет собой практическое различие между GNSS и более ранними мультилатерационными системами TDOA, но не является фундаментальным различием. В первом порядке ошибки оценки положения пользователя идентичны. [14]
Корректировки TOA
[ редактировать ]Управляющие уравнения мультилатерационной системы, основанные на том, что «расстояние» равно «скорости распространения», умноженной на «время полета», предполагают, что скорость распространения энергетических волн постоянна и одинакова на всех путях прохождения сигнала. Это эквивалентно предположению, что среда распространения однородна. Однако это не всегда достаточно точно; на некоторых трассах могут возникнуть дополнительные задержки распространения из-за неоднородностей среды. Соответственно, чтобы повысить точность решения, некоторые системы корректируют измеренные TOA с учетом таких задержек распространения. Таким образом, космические дополнения GNSS системы – например, глобальная система дополнения (WAAS) и Европейская геостационарная навигационная служба (EGNOS) – обеспечивают корректировку TOA в реальном времени для учета ионосферы. Аналогичным образом, правительственные агентства США вносили коррективы в измерения Loran-C для учета изменений проводимости почвы.
Расчет TDOA или TOA на основе полученных сигналов
[ редактировать ]

Предположим, что система наблюдения вычисляет разницу во времени ( для ) волновых фронтов, касающихся каждого приемника. Уравнение TDOA для приемников и (где скорость распространения волны и истинные дальности действия приемника транспортного средства и )





| ( 3 ) |

Количество часто называют псевдодиапазоном. Он отличается от истинного радиуса действия между автомобилем и станцией. смещением или смещением, которое одинаково для каждого сигнала. Разница между двумя псевдодиапазонами дает разницу тех же двух истинных диапазонов.

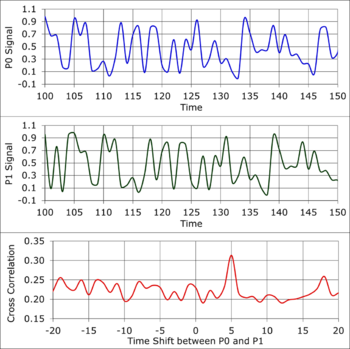
На рисунке 4а (первые два графика) показано моделирование формы импульсного сигнала, записанного приемниками. и . Расстояние между , и такова, что импульсу требуется на 5 единиц времени больше, чтобы достичь чем . Единицы времени на рисунке 4 произвольны. В следующей таблице приведены приблизительные единицы шкалы времени для записи различных типов волн:



| Тип волны | Материал | Единицы времени |
|---|---|---|
| Акустический | Воздух | 1 миллисекунда |
| Акустический | Вода | 1/2 миллисекунды |
| Акустический | Камень | 1/10 миллисекунды |
| Электромагнитный | Вакуум, воздух | 1 наносекунда |
Красная кривая на рисунке 4а (третий график) представляет собой взаимной корреляции. функцию . Функция взаимной корреляции перемещает одну кривую во времени по другой и возвращает пиковое значение, когда формы кривой совпадают. Пик в момент времени = 5 является мерой временного сдвига между записанными сигналами, который также является значение, необходимое для уравнения 3 .


На рисунке 4b показано такое же моделирование для широкополосного сигнала от эмиттера. Временной сдвиг составляет 5 единиц времени, поскольку геометрия и скорость волны такие же, как в примере на рисунке 4а. Опять же, пик взаимной корреляции приходится на .

Рисунок 4c представляет собой пример непрерывного узкополосного сигнала от эмиттера. Функция взаимной корреляции показывает важный фактор при выборе геометрии приемника. Существует пик в момент времени = 5 плюс каждое приращение периода сигнала. Чтобы получить одно решение для измеренной разницы во времени, наибольшее расстояние между любыми двумя приемниками должно быть ближе, чем одна длина волны сигнала излучателя. Некоторые системы, такие как LORAN C и Decca, упомянутые ранее (напомним, те же математические расчеты выполняются для движущегося приемника и нескольких известных передатчиков), используют интервал, превышающий одну длину волны, и включают в себя оборудование, такое как фазовый детектор , для подсчета количества циклов. которые проходят по мере движения эмиттера. Это работает только для непрерывных узкополосных сигналов из-за соотношения между фазой , частота и время :




Фазовый детектор будет воспринимать изменения частоты как измеренный фазовый шум , который будет представлять собой неопределенность, распространяющуюся на расчетное местоположение. Если фазовый шум достаточно велик, фазовый детектор может стать нестабильным.
Навигационные системы используют аналогичные, но немного более сложные методы, чем системы наблюдения, для получения разницы в задержке. Основное изменение заключается в том, что навигационные системы DTOA взаимно коррелируют каждый полученный сигнал с сохраненной копией переданного сигнала (а не с другим полученным сигналом). В результате получается временная задержка полученного сигнала плюс смещение пользовательских часов (псевдодиапазон, масштабируемый по ). Разница в результатах двух таких расчетов дает искомую разность задержек ( в уравнении 3 ).

Навигационные системы TOT выполняют аналогичные расчеты, что и навигационные системы TDOA. Однако последний шаг — вычитание результатов одной взаимной корреляции из другой — не выполняется. Таким образом, результат временные задержки принимаемого сигнала плюс смещение пользовательских часов ( в уравнении 3 ).

Алгоритмы решения
[ редактировать ]Общее поведение алгоритма
[ редактировать ]Как правило, используя прямой (неитеративный) алгоритм, уравнения измерения могут быть сведены к одному скалярному нелинейному «уравнению решения», имеющему одну неизвестную переменную (что-то похожее на исключение Гаусса – Жордана для линейных уравнений) – например, квадратный полином в одной декартовой координате транспортного средства. [15] Положение транспортного средства и TOT затем легко следуют друг за другом. Когда , уравнения измерения обычно имеют два набора решений (но иногда четыре), только один из которых является «правильным» (дает истинное положение TOT и транспортного средства при отсутствии ошибок измерения). «Неправильное» решение(я) уравнения решения не соответствует положению транспортного средства и TOT и является либо неоднозначным (дайте другие положения транспортного средства, которые имеют те же размеры), либо посторонним (не указывайте положения транспортного средства, которые имеют те же размеры, но являются результатом математических манипуляций).

Без избыточных измерений (т.е. ), все действительные алгоритмы дают один и тот же «правильный» набор решений (но, возможно, один или несколько разных наборов «неправильных» решений). Конечно, статистически большие ошибки измерений приводят к статистически большим ошибкам в правильных вычисленных координатах транспортного средства и TOT. При избыточных измерениях (т.е. ), функция потерь минимизируется или функция стоимости (также называемая функцией ошибок) (обычно используется квадратичная функция потерь). При избыточных измерениях и отсутствии ошибок измерений уравнения измерений обычно имеют единственное решение. Если присутствуют ошибки измерения, разные алгоритмы дают разные «правильные» решения; некоторые статистически лучше других.

Рекомендации по выбору алгоритма
[ редактировать ]Существует несколько категорий алгоритмов мультилатерации, а некоторые категории имеют несколько членов. Возможно, первый фактор, определяющий выбор алгоритма: требуется ли первоначальная оценка положения пользователя (как это делают итеративные алгоритмы ) или нет? Алгоритмы прямого (закрытого типа) оценивают положение пользователя, используя только измеренные TOA, и не требуют начальной оценки положения. Связанный с этим фактор, определяющий выбор алгоритма: легко ли автоматизировать алгоритм или, наоборот, требуется/ожидается ли человеческое взаимодействие? Большинство прямых (замкнутых) алгоритмов имеют множество решений, что вредно для их автоматизации. Третий фактор: хорошо ли работает алгоритм как с минимальным числом ( ) Измерения ТОА и с дополнительными (избыточными) измерениями?
Прямые алгоритмы можно разделить на категории в зависимости от пути распространения энергетических волн — прямолинейного или изогнутого. Последнее применимо к низкочастотным радиоволнам, которые следуют за земной поверхностью; первое применимо к более высокой частоте (скажем, более одного мегагерца) и к более коротким дальностям (сотни миль).
Эта таксономия имеет пять категорий: четыре для прямых алгоритмов и одна для итеративных алгоритмов (которые можно использовать как с или более измерений и любой тип пути распространения). Однако похоже, что алгоритмы только трёх из этих категорий были реализованы. Когда доступны избыточные измерения для любого пути распространения волны, итеративные алгоритмы имеют явное преимущество перед алгоритмами закрытой формы. [16] Часто в системах реального времени используются итеративные алгоритмы, тогда как в автономных исследованиях используются алгоритмы закрытой формы.
Все алгоритмы мультилатерации предполагают, что местоположения станций известны на момент передачи каждой волны. В системах TDOA станции закрепляются на земле, а их местоположение измеряется. В системах TOA спутники следуют по четко определенным орбитам и передают орбитальную информацию. (Для навигации часы пользовательского приемника должны быть синхронизированы с часами передатчика; для этого необходимо найти TOT.) Уравнение 3 представляет собой гиперболоид, описанный в предыдущем разделе, где 4 приемника (0 ≤ m ≤ 3) приводят к 3 не -линейные уравнения в 3-х неизвестных декартовых координатах (x,y,z). Затем система должна определить местоположение неизвестного пользователя (часто транспортного средства) в режиме реального времени. (Вариант: мультилатерационные системы управления воздушным движением используют сообщение транспондера режима C ВОРЛ для определения высоты самолета. Три или более приемников в известных местах используются для определения двух других измерений - либо (x,y) для приложения в аэропорту, либо широта/долгота для приложений за пределами аэропорта.)
Стивен Бэнкрофт, по-видимому, был первым, кто опубликовал закрытое решение проблемы определения местоположения пользователя (например, транспортного средства) в трех измерениях и обычного TOT с использованием четырех или более измерений TOA. [17] Алгоритм Бэнкрофта, как и многие другие, сводит задачу к решению квадратного алгебраического уравнения; его решение дает три декартовых координаты приемника, а также общий сигнал TOT. Впоследствии были разработаны и другие сопоставимые решения. [18] [19] [20] [21] [22] Примечательно, что все решения в закрытой форме были найдены спустя десять или более лет после запуска программы GPS с использованием итеративных методов.
Решения в закрытой форме часто включают возведение в квадрат расстояния или псевдодиапазона, чтобы избежать локальной линеаризации операции извлечения квадратного корня. Однако это возведение в квадрат изменяет статистику шума и может привести к неоптимальным решениям. Обычно используется двухэтапное упрощение: сначала решается линейная задача наименьших квадратов без пренебрежения сферическими ограничениями (квадрат расстояния), а затем находят пересечение с ограничением. Этот подход может привести к снижению производительности при наличии шума.
Более совершенный метод включает непосредственное решение задачи «наименьших квадратов с ограничениями», а также обработку модифицированной статистики шума. Хотя этот метод может не дать решения в замкнутой форме и часто требует итеративных подходов, он дает значительные преимущества. Обходя локальную линеаризацию, он облегчает сходимость к глобальному минимуму, не требуя первоначального предположения. Кроме того, он имеет тенденцию сталкиваться с меньшим количеством локальных минимумов и демонстрирует повышенную точность, особенно в шумной среде.
Решение методом наименьших квадратов с ограничениями для систем TDOA, по-видимому, изначально было предложено Хуангом и др. [23] и дополнительно изучены последующими исследователями. [24] [25] [26] Аналогичные методологии были внедрены для систем ТОТ. [27] также показано, как преобразовать задачу из TDOA в TOT путем включения дополнительного уравнения и неизвестного смещения часов. Решение TOT превосходит решение TDOA из-за его восприимчивости к окраске шума, вызванной вычитанием TOA опорной станции. Также обсуждается робастная версия, такая как «ограниченные наименьшие абсолютные отклонения», которая показывает превосходную производительность по сравнению с методом наименьших квадратов в сценариях, включающих негауссов шум и загрязнение от измерений выбросов.
Решение для определения местоположения самолета, имеющего известную высоту, с использованием трех измерений TOA, требует решения полинома четвертой степени (четвертого порядка). [14] [28]
В системах мультилатерации и исследованиях, использующих измерения сферического диапазона (например, Loran-C, Decca, Omega), использовались различные алгоритмы решения, основанные либо на итерационных методах, либо на сферической тригонометрии. [29]
Трехмерные декартовы алгоритмы
[ редактировать ]Для декартовых координат, когда доступны четыре TOA и требуется TOT, Бэнкрофт [17] или другой алгоритм закрытой формы (прямой) являются вариантами, даже если станции движутся. Когда четыре станции стационарны и TOT не нужен, возможно расширение алгоритма Фанга (основанного на DTOA) до трех измерений. [14] Другой вариант, и, вероятно, наиболее используемый на практике, — это итерационный нелинейный метод наименьших квадратов Гаусса–Ньютона. [16] [14]
Большинство алгоритмов закрытой формы сводят поиск местоположения транспортного средства пользователя на основе измеренных TOA к решению квадратного уравнения. Одно из решений квадратичного уравнения дает местоположение пользователя. Другое решение либо неоднозначное, либо постороннее — может произойти и то, и другое (какое из них зависит от размеров и местоположения пользователя). Как правило, устранение неправильного решения не составляет труда для человека, но может потребовать движения транспортного средства и/или информации от другой системы. Альтернативный метод, используемый в некоторых мультилатерационных системах, заключается в использовании метода NLLS Гаусса – Ньютона и требует резервного TOA при первом установлении наблюдения за транспортным средством. После этого требуется только минимальное количество TOA.
Спутниковые навигационные системы, такие как GPS, являются наиболее яркими примерами трехмерной мультилатерации. [3] [4] Wide Area Multilateration (WAM), трехмерная система наблюдения за самолетом, использует комбинацию трех или более измерений TOA и отчета о высоте самолета.
Двумерные декартовы алгоритмы
[ редактировать ]Для определения местоположения пользователя в двумерной (2-D) декартовой геометрии можно адаптировать один из многих методов, разработанных для трехмерной геометрии, наиболее мотивированных GPS, например, метод Бэнкрофта. [30] или Краузе. [19] Кроме того, существуют специализированные алгоритмы TDOA для двумерных изображений и станций в фиксированных местах — примечательным является метод Фанга. [15]
Было проведено сравнение двумерных декартовых алгоритмов наблюдения за поверхностью аэропорта. [31] Однако, как и в трехмерной ситуации, вероятно, наиболее используемые алгоритмы основаны на NLLS Гаусса – Ньютона. [16] [14]
Примерами двумерных декартовых мультилатеральных систем являются те, которые используются в крупных аэропортах многих стран для наблюдения за самолетами на поверхности или на очень малых высотах.
Двумерные сферические алгоритмы
[ редактировать ]Razin [29] разработал алгоритм замкнутой формы для сферической Земли. Уильямс и Ласт [32] расширил решение Разина до модели Земли соприкасающейся сферы.
Если этого требует сочетание расстояния между транспортным средством и станцией (например, сотни миль или более) и требуемая точность решения, необходимо учитывать эллипсоидную форму Земли. Это было достигнуто с помощью NLLS Гаусса – Ньютона. [33] метод в сочетании с эллипсоидными алгоритмами Андуайе, [34] Винсенти [35] и Содано. [36]
Примерами двумерных «сферических» мультилатеральных навигационных систем, учитывающих эллипсоидную форму Земли, являются радионавигационные системы «Лоран-С» и «Омега» , обе из которых эксплуатировались группами стран. их российские аналоги «ЧАЙКА» и «Альфа» Предполагается, что (соответственно) действуют аналогичным образом.
Декартово решение с ограниченными вычислительными ресурсами
[ редактировать ]Рассмотрим трехмерный декартовский сценарий. Повышение точности при большом количестве приемников (скажем, , пронумерован ) может стать проблемой для устройств с небольшими встроенными процессорами из-за времени, необходимого для решения нескольких одновременных нелинейных уравнений ( 1 , 2 , 3 ). Задачу TDOA можно превратить в систему линейных уравнений при наличии трех и более приемников, что позволяет сократить время вычислений. Начиная с уравнения 3 , решите , возведите обе части в квадрат, соберите члены и разделите все члены на :



| ( 4 ) |

Удаление термин удалит все члены с квадратным корнем. Это делается путем вычитания уравнения TDOA приемника. от каждого из остальных ( )



| ( 5 ) |

Сосредоточьтесь на мгновение на уравнении 1 . Квадрат , сгруппируйте похожие термины и используйте уравнение 2, чтобы заменить некоторые термины на .
| ( 6 ) |

Объедините уравнения 5 и 6 и запишите в виде набора линейных уравнений (для ) неизвестного местоположения излучателя


| ( 7 ) |

Используйте уравнение 7, чтобы сгенерировать четыре константы. от измеренных расстояний и времени для каждого приемника . Это будет набор неоднородные линейные уравнения.


Существует множество надежных методов линейной алгебры, которые могут решить , например, метод исключения Гаусса . Глава 15 в числовых рецептах [37] описывает несколько методов решения линейных уравнений и оценки неопределенности полученных значений.

Итерационные алгоритмы
[ редактировать ]Определяющей характеристикой и основным недостатком итерационных методов является то, что требуется «достаточно точная» первоначальная оценка местоположения «транспортного средства». Если первоначальная оценка недостаточно близка к решению, метод может не сходиться или сходиться к неоднозначному или постороннему решению. Однако итерационные методы имеют ряд преимуществ: [16]
- Можно использовать избыточные измерения
- Может использовать необратимые уравнения измерения. Позволяет, например, использовать сложные геометрические задачи, такие как эллипсоидальная земная поверхность.
- Могут использоваться измерения, не имеющие аналитического выражения (например, описанные численным алгоритмом и/или с использованием измеренных данных). Требуется способность вычислить возможное решение (например, дальность действия пользовательской станции) на основе гипотетических величин положения пользователя (например, широта и долгота)
- Поддается автоматизированной обработке (избегает посторонних и неоднозначных решений, возникающих в прямых алгоритмах)
- Может обрабатывать случайные ошибки измерения линейно, что при позволяет усреднять и, таким образом, минимизировать их влияние на ошибку позиционирования.

Многие системы мультилатерации в реальном времени обеспечивают быструю последовательность решений о местоположении пользователя — например, приемники GPS обычно предоставляют решения с интервалом в 1 секунду. Почти всегда такие системы реализуют: (а) переходный режим «сбора данных» (наблюдения) или «холодного запуска» (навигации), при котором местоположение пользователя определяется только на основе текущих измерений; и (b) режим устойчивого «отслеживания» (наблюдение) или «теплого старта» (навигация), при котором ранее вычисленное местоположение пользователя обновляется на основе текущих измерений (что делает спорным основной недостаток итеративных методов). Часто в этих двух режимах используются разные алгоритмы и/или разные требования к измерениям, причем (а) они более требовательны. Итерационный алгоритм Гаусса-Ньютона часто используется для (b) и может использоваться для обоих режимов.
Когда измерений TOA больше, чем итерационный алгоритм Гаусса-Ньютона для решения нелинейных задач наименьших квадратов неизвестные величины - например, 5 или более TOA спутников GPS - часто предпочтительнее использовать (NLLS). За исключением местоположений патологических станций, переопределенная ситуация исключает возможные неоднозначные и/или посторонние решения, которые могут возникнуть, когда доступно только минимальное количество измерений TOA. Еще одним важным преимуществом метода Гаусса-Ньютона перед некоторыми алгоритмами закрытой формы является то, что он обрабатывает ошибки измерения линейно, что часто является их природой, тем самым уменьшая ошибки измерения эффекта за счет усреднения. Метод Гаусса–Ньютона также можно использовать при минимальном количестве измерений.
Хотя итерационный алгоритм NLLS Гаусса-Ньютона широко используется в операционных системах (например, ASDE-X), Нелдера-Мида также доступен итерационный метод . Пример кода для последнего доступен как для систем TOA, так и для TDOA. [38]
Точность
[ редактировать ]Мультилатерация часто более точна для определения местоположения объекта, чем мультилатерация истинной дальности или мультиангуляция, поскольку (а) точно измерить истинную дальность (расстояние) между движущимся транспортным средством и станцией по своей сути сложно и/или дорого, особенно на больших расстояниях. и (б) точные измерения угла требуют больших антенн, которые являются дорогостоящими и трудными для размещения.
Точность мультилатерационной системы зависит от нескольких факторов, в том числе:
- Геометрия электронных приемника (ов) и передатчика(ов) оптических или , других волновых явлений.
- Точность синхронизации передатчиков (навигация) или приемников (наблюдение), включая термическую стабильность тактовых генераторов .
- Эффекты распространения — например, изменения дифракции или отражения от предполагаемой линии обзора или криволинейной траектории распространения.
- Полоса пропускания излучаемых сигналов — например, время нарастания импульсов, используемых с импульсно-кодированными сигналами.
- Неточности в местоположении передатчиков или приемников при использовании в качестве известных местоположений.
Точность можно рассчитать, используя границу Крамера–Рао и учитывая при ее формулировке указанные выше факторы. Кроме того, можно выбрать конфигурацию датчиков, которая минимизирует метрику, полученную на основе границы Крамера-Рао , чтобы оптимизировать фактическую оценку положения цели в интересующей области. [11]
Что касается первого вопроса (геометрия пользовательской станции), планирование мультилатерационной системы часто включает в себя анализ снижения точности (DOP) для обоснования решений о количестве и расположении станций, а также области обслуживания системы (два измерения) или объема (три измерения). ). При анализе DOP ошибки измерения TOA предполагаются статистически независимыми и одинаково распределенными. Это разумное предположение позволяет разделить влияние геометрии пользовательской станции и ошибок измерения TOA на ошибку вычисленного положения пользователя. [2] [39]
Синхронизация станций
[ редактировать ]Мультилатерация требует, чтобы пространственно разнесенные станции – либо передатчики (навигация), либо приемники (наблюдение) – имели синхронизированные «часы». Существует два различных требования к синхронизации: (1) постоянное поддержание точности синхронизации в течение ожидаемого срока службы соответствующего системного оборудования (например, 25 лет); и (2) для наблюдения точно измерить временной интервал между TOA для каждой передачи «транспортного средства». Требование (1) прозрачно для пользователя, но является важным фактором при проектировании системы. Для поддержания синхронизации часы станции необходимо регулярно синхронизировать или сбрасывать (например, каждые полдня для GPS, каждые несколько минут для ASDE-X). Часто точность системы постоянно контролируется «пользователями» в известных местах – например, GPS имеет пять мест мониторинга.
Для синхронизации станций использовалось несколько методов. Обычно метод выбирается исходя из расстояния между станциями. В приблизительном порядке увеличения расстояния методы включали:
- Станции без часов с проводным подключением (навигация и наблюдение). Станции без часов жестко подключены к центральному пункту, имеющему единые системные часы. Длины проводов обычно одинаковы, но это возможно не во всех приложениях. Этот метод использовался для локализации артиллерийского огня (станции представляют собой микрофоны).
- Радиосвязанные безчасовые станции (навигация и наблюдение). Безчасовые станции связаны по радио или микроволновой связи с центральным пунктом, имеющим единые системные часы. Задержки каналов выравниваются. Этот метод используется некоторыми системами мультилатерации глобальной зоны (WAM).
- Тестовая цель (наблюдение). Тестовая цель устанавливается в фиксированном, известном месте, которое видно всем получателям. Тестируемая цель передает данные так, как это сделал бы обычный пользователь, а ее положение рассчитывается на основе TOA. Его известное положение используется для настройки часов приемника. ASDE-X использует этот метод.
- Фиксированные задержки передатчика (навигация) – один передатчик назначается ведущим; остальные являются второстепенными. Мастер передает первым. Каждый вторичный передает фиксированное (короткое) время после получения передачи от ведущего. Лоран-С изначально использовал этот метод.
- Непрерывно транслировать информацию о фазе (навигация). Информация о фазе непрерывно транслируется на разных частотах. Используется компанией Decca.
- Передача импульсной фазовой информации (навигация). Импульсная фазовая информация передается на той же частоте по известному расписанию. Используется компанией Омега.
- Спутниковая передача времени (навигация и наблюдение). Существует несколько методов передачи времени с эталонной точки на удаленную станцию через спутник. Самый простой — синхронизировать станции по времени GPS. [40] Некоторые системы WAM используют этот метод.
- Атомные часы (навигация и наблюдение). На каждой станции есть одни или несколько синхронизированных атомных часов. GNSS используют этот метод, и Omega это сделала. Лоран-С переключился на него. Даже атомные часы смещаются, и может потребоваться система мониторинга и/или коррекции.
Зона обслуживания или объем
[ редактировать ]Чувствительность точности к геометрии станции транспортного средства
[ редактировать ]Хотя производительность всех систем навигации и наблюдения зависит от местоположения пользователя относительно станций, мультилатерационные системы более чувствительны к геометрии пользовательской станции, чем большинство систем. В качестве иллюстрации рассмотрим гипотетическую систему наблюдения с двумя станциями, которая отслеживает местоположение железнодорожного локомотива на прямом участке пути — одномерная ситуация. . На локомотиве установлен передатчик, и за пределами контролируемого участка путь прямой в обоих направлениях. Для удобства пусть начало системы находится посередине между станциями; затем происходит в самом начале.


Такая система будет хорошо работать, когда между двумя станциями находится локомотив. В движении локомотив движется прямо к одной станции и прямо от другой. Если локомотив находится на расстоянии вдали от начала координат, при отсутствии ошибок измерения TDOA будет (где – известная скорость распространения волны). Таким образом (игнорируя масштабный коэффициент ) величина смещения в TDOA увеличена вдвое. Если бы вместо псевдодальностей измерялись истинные дальности, разница в измерениях была бы идентичной.


Однако эта одномерная система псевдодальности вообще не будет работать, если между двумя станциями нет локомотива. В любом регионе расширения, если локомотив движется между двумя передачами, обязательно вдали от обеих станций, TDOA не изменится. При отсутствии ошибок изменения в двух TOA полностью компенсируются при формировании TDOA. В регионах расширения система всегда указывала бы, что локомотив находится на ближайшей станции, независимо от его фактического положения. Напротив, система, измеряющая истинные расстояния, будет функционировать в регионах расширения точно так же, как и когда локомотив находится между станциями. Эта одномерная система представляет собой крайний пример зоны обслуживания мультилатерационной системы.

В многомерном (т.е. или ) ситуация, крайние значения измерений одномерного сценария встречаются редко. Находясь в пределах периметра, окружающего станции, транспортное средство обычно частично движется в сторону от некоторых станций и частично в сторону других станций. Крайне маловероятно, что оно будет двигаться прямо к какой-либо одной станции и одновременно прямо от другой; более того, он не может двигаться прямо ко всем станциям или от них одновременно. Проще говоря, внутри периметра станций последовательные TDOA обычно усиливают, но не удваивают движение транспортных средств. которое произошло в течение этого интервала, т.е. . И наоборот, за пределами периметра последовательные TDOA обычно ослабляют, но не отменяют соответствующее движение транспортного средства, т. е. . Величина усиления или ослабления будет зависеть от местоположения автомобиля. Производительность системы, усредненная по всем направлениям, постоянно меняется в зависимости от местоположения пользователя.


Снижение точности (DOP)
[ редактировать ]При анализе 2D- или 3D-мультилатерационной системы обычно используется снижение точности (DOP) для количественной оценки влияния геометрии пользовательской станции на точность определения положения. [41] Базовая метрика DOP:

Символ передает идею о том, что существует несколько «разновидностей» DOP — выбор зависит от количества задействованных пространственных измерений и от того, включена ли ошибка для решения TOT в метрику. В числителе и знаменателе этой дроби должны использоваться одни и те же единицы измерения расстояния – например, метры. ?DOP – это безразмерный коэффициент, который обычно больше единицы, но не зависит от ошибки измерения псевдодальностей (PR). (Когда задействованы резервные станции, возможно иметь 0 < ?DOP < 1.) HDOP обычно используется (? = H и XXX = горизонтальное положение), когда интерес сосредоточен на положении транспортного средства на плоскости.

Предполагается, что ошибки псевдодальности добавляются к измеренным TOA, имеют гауссово распределение, имеют нулевое среднее (среднее значение) и имеют одинаковое стандартное отклонение. независимо от местоположения транспортного средства или задействованной станции. Обозначая ортогональные оси на плоскости как и , ошибка горизонтального положения статистически характеризуется как




Математически каждый «аромат» DOP представляет собой различную чувствительность («производную») стандартного отклонения количества решения (например, горизонтального положения) по отношению к стандартному отклонению ошибки псевдодальности. (Грубо говоря, ДОП соответствует условию .) То есть ?DOP — это скорость изменения стандартного отклонения величины решения от ее правильного значения из-за ошибок измерения — при условии, что используется линеаризованный алгоритм наименьших квадратов. (Это также наименьшая дисперсия для любого алгоритма. [42] В частности, HDOP — это чувствительность («производная») стандартного отклонения горизонтального положения пользователя (т. е. его чувствительности) к стандартному отклонению ошибки псевдодальности.

Для трех станций точность мультилатерации довольно хорошая практически в пределах всего треугольника, охватывающего станции, — скажем, 1 < HDOP < 1,5 и близка к HDOP для измерений истинной дальности с использованием одних и тех же станций. Однако HDOP мультилатерационной системы быстро ухудшается за пределами периметра станции. На рисунке 5 показана примерная зона обслуживания двумерной мультилатерационной системы с тремя станциями, образующими равносторонний треугольник. Станции M - U - V . BLU обозначает базовую единицу (разделение станций ). Внутренний круг более «консервативен» и соответствует «холодному старту» (без знания исходного положения автомобиля). Внешний круг более типичен и соответствует старту из известного места. Оси нормированы расстоянием между станциями.



На рис. 6 показаны контуры HDOP для той же мультилатерационной системы. Минимальное значение HDOP, 1,155, находится в центре треугольника, образованного станциями (и будет тем же значением для измерений истинной дальности). Начиная с HDOP = 1,25, показанные контуры следуют прогрессии с коэффициентом 2. Их примерно равное расстояние (за пределами трех V-образных участков между продолжениями базовой линии) согласуется с быстрым ростом ошибки горизонтального положения по мере удаления от станций. Поведение HDOP системы качественно отличается в трех V-образных областях между базовыми расширениями. HDOP бесконечен вдоль базовых расширений и значительно больше в этой области. (HDOP математически не определен на станциях; следовательно, на станции может заканчиваться несколько контуров DOP.) Между продолжениями базовой линии не следует использовать систему из трех станций.
Для мест за пределами периметра станций мультилатеральную систему обычно следует использовать только вблизи центра ближайшей базовой линии, соединяющей две станции (двумерная плоская ситуация), или вблизи центра ближайшей плоскости, содержащей три станции (трехмерная ситуация). Кроме того, систему мультилатерации следует использовать только для местоположений пользователей, которые составляют часть средней длины базовой линии (например, менее 25%) от ближайшей базовой линии или плоскости. Например:
- Чтобы гарантировать, что пользователи находились в пределах периметра станции, станции Loran-C часто размещались в местах, которые многие люди считали «удаленными», например, для обеспечения навигационного обслуживания кораблей и самолетов в районе Северной Атлантики были станции на Фарерских островах ( Дания), острова Ян-Майен (Норвегия) и Ангиск (Гренландия) .
- Хотя пользователи GPS на поверхности Земли или рядом с ней всегда находятся за пределами периметра видимых спутников, пользователь обычно находится близко к центру ближайшей плоскости, содержащей три спутника с малым углом возвышения, и находится на расстоянии от 5% до 10% от базовой линии. длина от этой плоскости.
Когда доступно больше требуемого минимального количества станций (часто это касается пользователя GPS), HDOP можно улучшить (уменьшить). Однако ограничения на использование системы за пределами периметра полигональной станции в основном сохраняются. Конечно, система обработки (например, GPS-приемник) должна иметь возможность использовать дополнительные TOA. Сегодня это не проблема, но в прошлом это было ограничением.
Примеры приложений
[ редактировать ]- GPS (США), ГЛОНАСС (Россия), Galileo (ЕС) – глобальные навигационные спутниковые системы. Двумя усложняющими факторами, связанными с системами TDOA, являются: (1) передающие станции (спутники) движутся; и (2) получатели должны вычислять TOT, что требует более сложного алгоритма (но обеспечивает пользователям точное время).
- Звуковая дальность - использование звука для определения источника артиллерийского огня.
- Электронные цели - использование волны Маха пули, проходящей через массив датчиков, для определения точки прибытия пули на цель на полигоне.
- Система Decca Navigator - система, использовавшаяся с конца Второй мировой войны до 2000 года и использующая разность фаз нескольких передатчиков для определения местоположения на пересечении гиперболоидов.
- Навигационная система Omega - всемирная система, технически аналогичная Decca, но обеспечивающая обслуживание на гораздо большем расстоянии; закрыта в 1997 году.
- Джи (навигация) - британская система определения местоположения самолетов, использовавшаяся во время Второй мировой войны.
- Лоран-С – Навигационная система, использующая TDOA сигналов от нескольких синхронизированных передатчиков; закрыться в США и Европе; Русская система «Чайка» была похожей.
- Пассивные ESM многолатерационные некооперативные системы наблюдения (меры электронной поддержки), в том числе Копач , Рамона , Тамара , ВЕРА и, возможно, Кольчуга – обнаружение передатчика с использованием нескольких приемников
- Отслеживание мобильного телефона - использование нескольких базовых станций для оценки местоположения телефона либо с помощью самого телефона (навигация, отраслевой термин - мультилатерация нисходящей линии связи), либо с помощью телефонной сети (наблюдение, отраслевой термин - мультилатерация восходящей линии связи).
- Сокращен контроль минимума вертикального эшелонирования (RVSM) для определения точности информации о высоте транспондера воздушного судна в режиме C/S. Применение мультилатерации к RVSM было впервые продемонстрировано компанией Roke Manor Research Limited в 1989 году. [43]
- Мультилатерация в широкой зоне (WAM) - система наблюдения за бортовыми самолетами, которая измеряет TOA излучений от транспондера самолета (на частоте 1090 МГц); на оперативной службе в ряде стран [44]
- Оборудование обнаружения поверхности аэропорта, модель X ( ASDE-X ) — система наблюдения за самолетами и другими транспортными средствами на поверхности аэропорта; включает в себя подсистему мультилатерации, измеряющую TOA излучений бортового транспондера (на частоте 1090 МГц); ASDE-X — это терминология Федерального управления гражданской авиации США, аналогичные системы находятся на вооружении ряда стран.
- Летное испытание «Правда» - корпорация Locata предлагает наземную систему местного позиционирования, которая дополняет GPS и используется НАСА и военными США.
- Местоположение сейсмического события. События (например, землетрясения) отслеживаются путем измерения TOA в разных местах и использования алгоритмов мультилатерации. [45]
- Гидролокатор с буксируемой антенной решеткой / SURTASS / SOFAR (ЗВУКОВАЯ фиксация и определение дальности) - системы, используемые ВМС США (и, вероятно, аналогичные системы других военно-морских сил). Целью является обнаружение и определение направления и приблизительного расстояния до источника звука (например, подводной лодки) от прослушивания. Датчики перемещаются, что необычно для систем наблюдения.
- Системы определения места падения ракет MILS и SMILS — акустические системы, развернутые для определения точек приводнения в Южной Атлантике ракет «Полярис», «Посейдон» и «Трайдент», которые прошли испытательные запуски с мыса Канаверал, Флорида.
- Пассивный гидролокатор — использует акустические волны (TOA и другие функции) для обнаружения (и, возможно, локализации) кораблей.
- Атлантический подводный центр испытаний и оценки (AUTEC) - объект ВМС США, который измеряет траектории подводных лодок и оружия с помощью акустики.
- Ультразвуковое позиционирование в помещении — трехмерное положение смартфона внутри «комнаты» здания можно получить с помощью ультразвуковой системы. [46] [47] [48]
- ShotSpotter — система определения местоположения стрельбы [49]
См. также
[ редактировать ]- Ранжирование
- Мультилатерация истинного диапазона
- Дальномер
- Гиперболическая навигация - альтернативный термин (мультилатерации) для навигационных систем TDOA со стационарными передатчиками.
- FDOA – Разность частот прихода с использованием дифференциальных доплеровских измерений.
- Триангуляция - местоположение путем углового измерения на пересекающихся линиях пеленга.
- Трилатерация - расположение на нескольких расстояниях, обычно на трех расстояниях на плоскости; особый метод, используемый при съемке.
- Отслеживание мобильного телефона
- Многомерное масштабирование
- Система позиционирования
- Задача Аполлония § Приложения
- Радиолокация
- Радионавигация
- Определение местоположения в реальном времени — международный стандарт отслеживания активов и персонала с использованием беспроводного оборудования и программного обеспечения реального времени.
- Система определения местоположения в реальном времени . Общие методы отслеживания активов и персонала с использованием беспроводного оборудования и программного обеспечения реального времени.
- Навигация по большому кругу . Предоставляет базовую математическую информацию для работы со сферическими диапазонами.
- Нелинейные методы наименьших квадратов — форма анализа методом наименьших квадратов, когда используются нелинейные уравнения; используется для мультилатерации, когда (а) имеется больше измерений разности расстояний, чем неизвестных переменных, и/или (б) уравнения измерения слишком сложны, чтобы их можно было инвертировать (например, уравнения для эллипсоидной Земли), и/или (в) табличные необходимо использовать данные (например, проводимость земли, по которой распространяется радиоволна).
- Всемирное координированное время (UTC) — стандарт времени, предоставляемый GPS-приемниками (с опубликованным смещением).
- Синхронизация часов - Методы синхронизации часов на удаленных станциях.
- Атомные часы - иногда используются для синхронизации нескольких далеко разнесенных станций.
- Снижение точности . Аналитический метод, часто применяемый при проектировании мультилатеральных систем.
- Алгоритм Гаусса – Ньютона - итерационный метод решения, используемый несколькими операционными мультилатерационными системами.
- Функция потерь . Также называется функцией затрат или функцией ошибок; используется для преобразования избыточных измерений TOA в одно уравнение
- Вращение осей . Адреса вращаются из одной декартовой системы координат в другую.
- Система определения местоположения в реальном времени (RTLS). Мультилатерация может использоваться в системе наблюдения внутри помещений RTLS.
- Унилатерация [50] - Тип системы определения местоположения в реальном времени (RTLS).
Примечания
[ редактировать ]- ^ Прок, Джерри (2021). «Гиперболические радионавигационные системы» . Проверено 11 апреля 2022 г.
- ^ Jump up to: а б Ограничения точности гиперболических мультилатерационных систем , Гарри Б. Ли, Массачусетский технологический институт, лаборатория Линкольна, Техническая заметка 1973-11, 22 марта 1973 г.
- ^ Jump up to: а б «Существование и уникальность решений GPS», Дж. С. Абель и Дж. В. Чаффи, Транзакции IEEE по аэрокосмическим и электронным системам , том. 26, нет. 6, стр. 748–53, сентябрь 1991 г.
- ^ Jump up to: а б «Комментарии Дж. С. Абеля и Дж. В. Чаффи к «Существованию и уникальности решений GPS», BT Fang, IEEE Transactions on Aerospace and Electronic Systems , vol. 28, нет. 4 октября 1992 г.
- ^ «Роль часов в GPS-приемнике», Пратап Н. Мисра, GPS World , апрель 1996 г.
- ^ Джеймс, Каллан (2007). «Мультилатерация: замена радару?» . Авиация сегодня . Проверено 10 апреля 2022 г.
- ^ «Глобальная мультилатерация (WAM)» . Федеральное управление гражданской авиации. 2021 . Проверено 10 апреля 2022 г.
- ^ «Справочное руководство по Multilateration для руководителей» . ЭРА . Проверено 12 апреля 2022 г.
- ^ «Мобильное позиционирование с использованием беспроводных сетей: возможности и фундаментальные ограничения на основе доступных измерений беспроводной сети», Густафссон и Ф. Гуннарссон, журнал IEEE Signal Processing Magazine , том. 22, нет. 4, стр. 41–53, июль 2005 г.
- ^ Другими словами, при выполнении наблюдения, имея два приемника в известных местах, можно получить трехмерную поверхность (характеризуемую как один лист гиперболоида вращения), для которой все точки на этой поверхности будут иметь одинаковое дифференциальное расстояние от указанной приемники, т. е. сигнал, передаваемый из любой точки поверхности, будет иметь в приемниках тот же TDOA, что и сигнал, передаваемый из любой другой точки поверхности.
Поэтому на практике измеряется TDOA, соответствующий (движущемуся) передатчику, выводится соответствующая гиперболическая поверхность, и говорят, что передатчик «расположен» где-то на этой поверхности. - ^ Jump up to: а б Доминго-Перес, Франциско; Лазаро-Галилея, Хосе Луис; Визер, Андреас; Мартин-Горостиза, Эрнесто; Салидо-Монзу, Дэвид; Ллана, Альваро де ла (апрель 2016 г.). «Определение размещения датчика для позиционирования по разнице дальности с использованием эволюционной многокритериальной оптимизации». Экспертные системы с приложениями . 47 : 95–105. дои : 10.1016/j.eswa.2015.11.008 .
- ^ Развитие навигации и синхронизации Loran-C , Гиффорд Хефли, Национальное бюро стандартов США, октябрь 1972 г.
- ^ Учебник курса по навигационной системе Omega , Питер Б. Моррис и др. , TASC, июль 1994 г.
- ^ Jump up to: а б с д и Гейер, Майкл (июнь 2016 г.). Анализ навигации и наблюдения самолетов с привязкой к Земле . Национальная транспортная библиотека Министерства транспорта США: Национальный центр транспортных систем имени Джона А. Вольпе Министерства транспорта США.
- ^ Jump up to: а б «Простые решения для гиперболических и связанных с ними исправлений положения», Бертран Т. Фанг, Транзакции IEEE в аэрокосмических и электронных системах , сентябрь 1990 г., стр. 748–753.
- ^ Jump up to: а б с д Сирола, Ниило (март 2010 г.). Алгоритмы закрытой формы в мобильном позиционировании: мифы и заблуждения . 7-й семинар по позиционированию, навигации и связи 2010 WPNC'10. CiteSeerX 10.1.1.966.9430 . .
- ^ Jump up to: а б «Алгебраическое решение уравнений GPS» , Стивен Бэнкрофт, Транзакции IEEE в аэрокосмических и электронных системах , том: AES-21, выпуск: 7 (январь 1985 г.), стр. 56–59.
- ^ «Трилатерация и расширение навигации по системе глобального позиционирования», BT Fang, Journal of Guidance, Control и Dynamics , vol. 9 (1986), стр. 715–717.
- ^ Jump up to: а б «Прямое решение навигационных уравнений типа GPS», Л.О. Краузе, IEEE Transactions on Aerospace and Electronic Systems , AES-23, 2 (1987), стр. 225–232.
- ^ Аналитическое решение GPS-навигации, Альфред Клейсберг, Исследовательский сборник Штутгартского университета , 1994.
- ^ Бучер, Ральф; Мисра, Д. (2002). «Синтезируемая VHDL-модель точного решения для трехмерной гиперболической системы позиционирования» . Проектирование СБИС . 15 (2): 507–520. дои : 10.1080/1065514021000012129 .
- ^ «Простой и эффективный оценщик гиперболического местоположения», Ю. Т. Чан и К. К. Хо, Транзакции IEEE по аэрокосмическим и электронным системам , том: AES-42, выпуск: 8 (август 1994 г.), стр. 1905-1915.
- ^ Йитенг Хуанг, Дж. Бенести, Г. В. Элко и Р. М. Мерсеро, «Локализация пассивного источника в реальном времени: практический подход наименьших квадратов с линейной коррекцией», в IEEE Transactions on Speech and Audio Processing, vol. 9, нет. 8, стр. 943–956, ноябрь 2001 г., doi: 10.1109/89.966097.
- ^ К. В. Ченг, Х. К. Со, В. К. Ма, Ю. Т. Чан, «Подход с ограничениями на основе наименьших квадратов к мобильному позиционированию: алгоритмы и оптимальность», Журнал EURASIP по достижениям в области обработки сигналов, 2006 (1), 1-23.
- ^ А. Бек, П. Стойка и Дж. Ли, «Точные и приближенные решения проблем локализации источника», IEEE Transactions on Signal Processing, vol. 56, нет. 5, стр. 1770–1778, 2008.
- ^ В. Хейдари, М. Амидзаде, К. Садеги и А. М. Пезешк, «Точные решения локализации источника разницы во времени прибытия на основе полуопределенного программирования и множителя Лагранжа: анализ сложности и производительности», IET Signal Processing, vol. 8, нет. 8, стр. 868–877, 2014.
- ^ Р. Храбие, М. Нейфер, Г. Уэдраого, И. Б. Хамида, П. Багналл и С. Сезгинер, «Усовершенствованные методы мультилатерации с глобальным подходом», Симпозиум IEEE / ION 2020 по позиционированию, местоположению и навигации (ПЛАНЫ), Портленд, ИЛИ, США, 2020 г., стр. 1070–1078, doi: 10.1109/PLANS46316.2020.9110183.
- ^ Фатак, М.; Чансаркар, М.; Кохли, С. (январь 1999 г.). «Определение местоположения по трем спутникам GPS и высоте: прямой метод». Транзакции IEEE по аэрокосмическим и электронным системам . 35 (1): 350. Бибкод : 1999ITAES..35..350P . дои : 10.1109/7.745705 .
- ^ Jump up to: а б Разин, Шелдон (осень 1967 г.). «Явное (неитеративное) решение Лорана». Судоходство: Журнал Института мореплавания . 14 (3): 265–269. дои : 10.1002/j.2161-4296.1967.tb02208.x .
- ^ Гейер, Майкл; Даскалакис, Анастасиос (1998). Решение уравнений пассивной мультилатерации с использованием алгоритма Бэнкрофта . Конференция по цифровым авиационным системам (DASC). Сиэтл, Вашингтон.
- ^ «Алгоритмы локализации для систем мультилатерации (MLAT) при наземном наблюдении в аэропортах», Иван А. Мантилья-Гавириа, Мауро Леонарди, Гаспаре Галати и Хуан В. Бальбастре-Техедор, Springer-Verlag, Лондон, 2014 г.
- ^ Уильямс, Пол; Последний, Дэвид (3–7 ноября 2003 г.). О преобразователях разницы во времени в координаты Loran-C (PDF) . Международная ассоциация Лорана (ILA) – 32-я ежегодная конференция и технический симпозиум . Боулдер, Колорадо. CiteSeerX 10.1.1.594.6212 .
- ^ Минимальные стандарты производительности (MPS) для автоматических систем преобразования координат , Отчет Специального комитета RTCM № 75, Радиотехническая комиссия для морских служб, Вашингтон, округ Колумбия, 1984 г.
- ^ «Формула, определяющая длину геодезической, соединяющая две точки эллипсоида, заданные их географическими координатами», Мари Анри Андуайе, Бюллетень Geodsique , № 34 (1932), страницы 77–81
- ^ «Прямые и обратные решения геодезических на эллипсоидах с применением вложенных уравнений», Таддеус Винсенти, Обзор обзора , XXIII, номер 176 (апрель 1975 г.)
- ^ «Общее неитерационное решение обратных и прямых геодезических задач», Эмануэль М. Содано, Bulletin Géodésique , том 75 (1965), стр. 69–89.
- ^ числовых рецептов . Официальный сайт
- ^ «Библиотека лаборатории подводной связи и навигации» . Гитхаб .
- ^ Улучшенные спутниковые группировки для покрытия CONUS ATC , Гарри Б. Ли и Эндрю Э. Уэйд, Массачусетский технологический институт, лаборатория Линкольна, отчет о проекте ATC-23, 1 мая 1974 г.
- ^ Односторонняя передача времени по GPS , Национальный институт стандартов и технологий.
- ^ «Снижение точности» , Ричард Лэнгли, GPS World , май 1999 г., стр. 52–59.
- ^ Чаффи, Дж.; Абель, Дж. (1994). GDOP и граница Крамера-Рао . Симпозиум IEEE по положению, местоположению и навигации (ПЛАНЫ). Лас-Вегас, Невада. стр. 663–668.
- ^ Международная организация воздушного движения (2002). «Идеальное время» (PDF) . Архивировано из оригинала (PDF) 18 декабря 2014 года . Проверено 31 августа 2012 г.
- ^ «Глобальная мультилатерация WAM» . Федеральное управление гражданской авиации . Проверено 12 мая 2022 г.
- ^ «Решение в закрытой форме для определения местоположения землетрясения в однородном полупространстве на основе алгоритма определения местоположения GPS Бэнкрофта», Демиан Гомес, Чарльз Лэнгстон и Боб Смолли, Бюллетень Сейсмологического общества Америки , январь 2015 г.
- ^ Каротенуто, Риккардо; Закуска, Массимо; Гиерон, Деметрий; Дж. Делла Корте, Франческо (январь 2020 г.). «Восстановление мобильной синхронизации для ультразвукового позиционирования в помещении» . Датчики . 20 (3): 702. Бибкод : 2020Senso..20..702C . дои : 10.3390/s20030702 . ПМЦ 7038533 . ПМИД 32012789 .
- ^ Каротенуто, Р.; Меренда, М.; Айеро, Д.; Корте, Ф.Г. Делла (сентябрь 2020 г.). «Позиционирование объектов в помещении с помощью смартфона и RFID или QRCode» . 2020 5-я Международная конференция по умным и устойчивым технологиям (SpliTech) . стр. 1–6. дои : 10.23919/SpliTech49282.2020.9243703 . ISBN 978-953-290-105-4 . S2CID 226264802 .
- ^ «RTLS: точное позиционирование в помещении на основе ультразвука» . Сонитор . 2022 . Проверено 27 апреля 2022 г.
- ^ Министерство юстиции США (1999). «Полевая оценка системы определения места выстрела ShotSpotter: окончательный отчет о полевых испытаниях в Редвуд-Сити» . Проверено 9 апреля 2021 г.
- ^ «Унилатерация» . ГИС-энциклопедия . 26 мая 2016 года . Проверено 27 апреля 2022 г.