Вторичный радар наблюдения
Эта статья нуждается в дополнительных цитатах для проверки . ( декабрь 2007 г. ) |

Вторичный обзорный радар ( ССР ) [1] это радиолокационная система, используемая в управлении воздушным движением (УВД), которая в отличие от первичных радиолокационных систем, которые измеряют пеленг и расстояние до целей с использованием обнаруженных отражений радиосигналов, полагается на цели, оснащенные радиолокационным транспондером , которые отвечают на каждый сигнал запроса путем передачу закодированных данных, таких как идентификационный код, высоту самолета и дополнительную информацию, в зависимости от выбранного режима. SSR основана на технологии военной идентификации «свой-чужой» (IFF), первоначально разработанной во время Второй мировой войны ; следовательно, эти две системы по-прежнему совместимы. Моноимпульсный радар вторичного наблюдения ( MSSR ), Mode S , TCAS и ADS-B — это аналогичные современные методы вторичного наблюдения.
Обзор
[ редактировать ]Первичный радар
[ редактировать ]Быстрое во время войны развитие радаров имело очевидное применение в управлении воздушным движением (УВД) как средство обеспечения непрерывного наблюдения за расположением воздушного движения. Точное знание местонахождения самолетов позволило бы снизить обычные стандарты процедурного эшелонирования, что, в свою очередь, обещало значительное повышение эффективности системы воздушных путей. Этот тип радара (называемый первичным радаром ) может обнаруживать и сообщать о положении всего, что отражает передаваемые им радиосигналы, включая, в зависимости от его конструкции, самолеты, птиц, погоду и особенности местности. Для целей управления воздушным движением это является одновременно преимуществом и недостатком. Его цели не должны взаимодействовать, они должны только находиться в пределах его зоны действия и иметь возможность отражать радиоволны, но он только указывает положение целей, но не идентифицирует их. Когда первичный радар был единственным доступным типом радара, корреляция сигналов отдельных радаров с конкретным самолетом обычно достигалась диспетчером, наблюдающим за направленным разворотом самолета. Первичный радар по-прежнему используется УВД в качестве резервной/дополнительной системы к вторичному радару, хотя его зона действия и информация более ограничены. [2] [3] [4]
Вторичный радар
[ редактировать ]
Необходимость иметь возможность более легко и надежно идентифицировать самолеты привела к появлению еще одной разработки радара военного времени - системы идентификации «свой-чужой» (IFF), которая была создана как средство точной идентификации дружественных самолетов среди неизвестных. Эта система, которая стала известна в гражданском использовании как радар вторичного наблюдения (SSR), или в США как система радиолокационного маяка управления воздушным движением (ATCRBS), опирается на часть оборудования на борту самолета, известную как « транспондер ». Транспондер представляет собой пару радиоприемника и передатчика, которая принимает на частоте 1030 МГц и передает на частоте 1090 МГц. Транспондер самолета-мишени отвечает на сигналы запросчика (обычно, но не обязательно, наземной станции, расположенной рядом с основным радаром), передавая закодированный ответный сигнал, содержащий запрошенную информацию. [5]

И гражданский ССР, и военный IFF стали намного сложнее, чем их предки военного времени, но остаются совместимыми друг с другом, не в последнюю очередь для того, чтобы позволить военным самолетам действовать в гражданском воздушном пространстве. SSR может предоставить гораздо более подробную информацию, например, высоту самолета, а также обеспечить прямой обмен данными между самолетами для предотвращения столкновений. Большинство систем SSR полагаются на транспондеры режима C самолета , которые сообщают барометрическую высоту . пилота Барометрическая высота не зависит от настроек высотомера . [6] таким образом предотвращая ложную передачу высоты, если высотомер настроен неправильно. При необходимости системы управления воздушным движением пересчитывают сообщаемые барометрические высоты в истинные высоты на основе собственных эталонных значений давления.
Учитывая свою основную военную роль в надежной идентификации друзей, IFF имеет более безопасные (зашифрованные) сообщения для предотвращения «подделки» со стороны противника и используется на многих типах военных платформ, включая воздушные, морские и наземные транспортные средства. [ нужна ссылка ]
Стандарты и спецификации
[ редактировать ]Международная организация гражданской авиации (ИКАО) — специализированное учреждение ООН со штаб-квартирой в Монреале, Квебек , Канада. Он публикует приложения к Конвенции, а в Приложении 10 рассматриваются Стандарты и Рекомендуемая практика для авиационной электросвязи. Цель состоит в том, чтобы обеспечить совместимость самолетов, пересекающих международные границы, с системами управления воздушным движением во всех странах, которые можно посетить. Том III, Часть 1, посвящен системам цифровой передачи данных, включая функции линии передачи данных режима S, а том IV определяет ее работу и сигналы в космосе. [7]
Американская радиотехническая комиссия по аэронавтике (RTCA) и Европейская организация по оборудованию гражданской авиации (Eurocae) разрабатывают минимальные стандарты эксплуатационных характеристик как для наземного, так и для бортового оборудования в соответствии со стандартами, указанными в Приложении 10 ИКАО. Обе организации часто работают вместе и разрабатывают общие документы. [ нужна ссылка ]
ARINC (Aeronautical Radio, Incorporated) — это организация, управляемая авиакомпаниями, которая занимается формой, пригодностью и функциями оборудования, перевозимого на самолетах. Его основная цель — обеспечить конкуренцию между производителями путем указания размеров, требований к питанию, интерфейсов и производительности оборудования, размещаемого в аппаратном отсеке самолета. [ нужна ссылка ]
Операция
[ редактировать ]Целью SSR является улучшение возможностей обнаружения и идентификации воздушных судов при автоматическом предоставлении эшелона полета (барометрической высоты) воздушного судна. Наземная станция ВОРЛ передает импульсы запроса на частоте 1030 МГц (непрерывно в режимах A, C и выборочно в режиме S), когда ее антенна вращается или подвергается электронному сканированию в пространстве. самолета Транспондер в пределах прямой видимости «слушает» сигнал запроса ВОРЛ и передает ответ на частоте 1090 МГц, который предоставляет информацию о самолете. Отправляемый ответ зависит от режима запроса. Самолет отображается в виде значка с меткой на экране радара диспетчера в измеренном пеленге и дальности. Воздушное судно без работающего транспондера по-прежнему может наблюдаться с помощью первичного радара, но будет отображаться диспетчеру без использования данных, полученных от ВОРЛ. Обычно для полетов в контролируемом воздушном пространстве требуется наличие работающего транспондера, и многие самолеты имеют резервный транспондер для обеспечения выполнения этого условия. [8]
Режимы допроса
[ редактировать ]Существует несколько режимов опроса, каждый из которых обозначается разницей в интервале между двумя импульсами передатчика, известными как P1 и P3. [7] Каждый режим вызывает разную реакцию самолета. Третий импульс, P2, предназначен для подавления боковых лепестков и описан ниже. Не включены дополнительные военные режимы (или IFF), которые описаны в разделе «Идентификация «свой-чужой» .

| Режим | Интервал между импульсами P1–P3 | Цель |
|---|---|---|
| А | 8 мкс | Личность |
| Б | 17 мкс | Личность |
| С | 21 мкс | Высота |
| Д | 25 мкс | Неопределенный |
| С | 3,5 мкс | Многоцелевой |

Запрос в режиме А вызывает 12-импульсный ответ, указывающий идентификационный номер, связанный с этим воздушным судном. 12 импульсов данных заключены в скобки с двумя кадровыми импульсами, F1 и F2. X-импульс не используется. Запрос в режиме C дает 11-импульсный ответ (импульс D1 не используется), указывающий высоту самолета, указанную его высотомером, с шагом 100 футов. Режим B дал такой же ответ, что и режим A, и одно время использовался в Австралии. Режим D никогда не использовался в эксплуатации. [ нужна ссылка ]
Новый режим, режим S, имеет другие характеристики запроса. Он состоит из импульсов P1 и P2 от главного луча антенны, чтобы гарантировать, что транспондеры режима A и режима C не отвечают, за которыми следует длинный фазомодулированный импульс. [7]
Наземная антенна является узконаправленной, но ее нельзя спроектировать без боковых лепестков. Самолет также мог обнаруживать запросы, исходящие от этих боковых лепестков, и соответствующим образом отвечать. Однако эти ответы нельзя отличить от предполагаемых ответов главного луча и могут привести к ложным показаниям самолета при ошибочном пеленге. Чтобы преодолеть эту проблему, наземная антенна снабжена вторым, преимущественно всенаправленным, лучом с усилением, превышающим усиление боковых лепестков, но не усиление главного лепестка. Третий импульс P2 передается из этого второго луча через 2 мкс после P1. Воздушное судно, обнаружившее P2 сильнее, чем P1 (следовательно, в боковом лепестке и при неправильном пеленге главного лепестка), не отвечает. [7]
Недостатки
[ редактировать ]Ряд проблем описан в публикации ИКАО 1983 года, озаглавленной « Рекомендательный циркуляр по вторичному обзорному радару режима S» . [9]
Режим А
[ редактировать ]
Хотя 4096 различных идентификационных кодов, доступных в режиме ответа A, может показаться достаточным, как только определенные коды зарезервированы для экстренных и других целей, их количество значительно сокращается. В идеале самолет должен сохранять один и тот же код от взлета до приземления, даже при пересечении международных границ, поскольку он используется в центре управления воздушным движением для отображения позывного самолета с использованием процесса, известного как преобразование кода/позывного. Очевидно, что один и тот же код режима А не следует присваивать двум самолетам одновременно, поскольку диспетчеру на земле может быть присвоен неправильный позывной для связи с воздушным судном. [7]
Режим С
[ редактировать ]Ответ в режиме C обеспечивает приращение высоты в 100 футов, что изначально было достаточно для наблюдения за воздушными судами, расположенными на расстоянии не менее 1000 футов. Однако по мере того, как воздушное пространство становилось все более перегруженным, стало важно следить за тем, не выходят ли самолеты за пределы заданного эшелона полета. Небольшое изменение на несколько футов может пересечь пороговое значение и быть обозначено как следующее увеличение и изменение на 100 футов. Желательны были меньшие приращения. [ нужна ссылка ]
ФРУКТЫ
[ редактировать ]Поскольку все воздушные суда отвечают на одной и той же частоте 1090 МГц, наземная станция также будет получать ответы воздушного судна, основанные на ответах других наземных станций. Эти нежелательные ответы известны как FRUIT (ложные ответы, несинхронизированные с передачами запросчика или, альтернативно, ложные ответы, несинхронизированные по времени). Несколько последовательных ответов FRUIT могут объединиться и указать на несуществующий самолет. По мере расширения воздушного транспорта и увеличения количества самолетов в воздушном пространстве количество генерируемых ФРУКТОВ также будет увеличиваться. [9]
Гарбл
[ редактировать ]Ответы FRUIT могут перекрываться с нужными ответами на наземном приемнике, что приводит к ошибкам при извлечении включенных данных. Решение состоит в том, чтобы увеличить частоту запросов, чтобы получить больше ответов, в надежде, что некоторые из них будут свободны от помех. Этот процесс обречен на провал, поскольку увеличение частоты ответов только увеличивает помехи другим пользователям, и наоборот. [9]
Синхронное искажение
[ редактировать ]Если траектории двух самолетов пересекаются в пределах наклонной дальности около двух миль от наземного запросчика, их ответы будут перекрываться, а возникающие помехи затруднят их обнаружение. Обычно диспетчер теряет самолеты с большей дальностью полета как раз в тот момент, когда диспетчер может быть наиболее заинтересован в тщательном наблюдении за ними. [9]
Захватывать
[ редактировать ]Пока воздушное судно отвечает на один наземный запрос, оно не может ответить на другой запрос, что снижает эффективность обнаружения. Для запроса в режиме A или C ответ транспондера может занять до 120 мкс, прежде чем он сможет ответить на следующий запрос. [9]
Антенна
[ редактировать ]
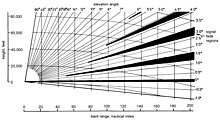
Наземная антенна имеет типичную ширину луча по горизонтали 3 дБ, равную 2,5°, что ограничивает точность определения пеленга самолета. Точность можно повысить, выполнив множество опросов по мере того, как луч антенны сканирует самолет, и более точную оценку можно получить, отметив, где начались ответы и где они закончились, и приняв центр ответов за направление самолета. Это известно как процесс скользящего окна. [1]
Ранняя система использовала антенну, известную как свинарник . Он имеет большой горизонтальный размер для создания узкого горизонтального луча и небольшой вертикальный размер для обеспечения покрытия от линии горизонта до почти над головой. С этой антенной было две проблемы. Во-первых, почти половина энергии направляется на землю, где она отражается обратно вверх и мешает восходящей энергии, вызывая глубокие нули при определенных углах возвышения и потерю контакта с самолетом. Во-вторых, если окружающая земля имеет уклон, то отраженная энергия частично смещается по горизонтали, искажая форму луча и указанный пеленг самолета. Это было особенно важно в моноимпульсной системе с существенно улучшенной точностью измерения подшипников. [10]
Разработки по устранению недостатков
[ редактировать ]Недостатки режимов A и C были обнаружены довольно рано при использовании SSR, и в 1967 году Уллиатт опубликовал статью. [11] а в 1969 году расширенная статья, [12] который предложил усовершенствования РСБ для решения этих проблем. Суть предложений заключалась в новых форматах допроса и ответа. Идентификатор воздушного судна и его высота должны были быть включены в один ответ, поэтому сопоставление двух элементов данных не требовалось. Для защиты от ошибок была предложена простая система четности — см. Вторичный радар наблюдения — сегодня и завтра . [13] Моноимпульс будет использоваться для определения пеленга самолета, тем самым сокращая до одного количество запросов/ответов на самолет при каждом сканировании антенны. Кроме того, каждому запросу будут предшествовать импульсы основного луча P1 и P2, разделенные интервалом 2 мкс, чтобы транспондеры, работающие в режимах A и C, воспринимали его как исходящий от бокового лепестка антенны, не отвечали и не вызывали ненужных FRUIT. [12]
ФАУ рассматривало аналогичные проблемы, но предполагало, что потребуется новая пара частот. Уллиатт показал, что существующие частоты 1030 МГц и 1090 МГц можно сохранить и использовать существующие наземные запросчики и бортовые транспондеры с соответствующими модификациями. Результатом стал Меморандум о взаимопонимании между США и Великобританией о разработке общей системы. В США программа называлась DABS (система маяков с дискретным адресом), а в Великобритании Adsel (селективный адрес). [14]
Моноимпульс, что означает одиночный импульс, использовался в военных системах слежения, при которых антенна управлялась так, чтобы следовать за определенной целью, удерживая цель в центре луча. Уллиатт предложил использовать непрерывно вращающийся луч с измерением пеленга, где бы импульс ни попадал в луч. [15]
ФАУ привлекло лабораторию Линкольна Массачусетского технологического института для дальнейшей разработки системы и подготовило серию отчетов УВД, в которых описываются все аспекты новой совместной разработки. [16] К концепции Уллиатта было добавлено использование более мощной 24-битной системы четности с использованием циклического избыточного кода , которая не только обеспечивала точность полученных данных без необходимости повторения, но и позволяла исправлять ошибки, вызванные перекрытием ответа FRUIT. . Предлагаемый идентификационный код самолета состоял из 24 битов с 16 миллионами перестановок. Это позволило каждому самолету получить свой уникальный адрес. Блоки адресов распределены по разным странам [17] и далее распределяется по конкретным авиакомпаниям, чтобы по адресу можно было легко их идентифицировать. В отчете лаборатории Линкольна ATC 42, озаглавленном «Система маяков режима S: функциональное описание», содержится подробная информация о предлагаемой новой системе. [18]
Обе страны сообщили о результатах своих разработок в совместном документе ADSEL/DABS – вторичный радар наблюдения с избирательным адресом . [14] За этим последовала конференция в штаб-квартире ИКАО в Монреале, на которой тест маломощного опроса, проведенный Лабораторией Линкольна, успешно установил связь с модернизированным коммерческим транспондером SSR британского производства. [ нужна ссылка ]

Единственное, что требовалось, — это международное имя. Многое было сделано из предложенных новых функций, но существующие наземные запросчики ССР по-прежнему будут использоваться, хотя и с модификациями, а существующие авиационные транспондеры - опять же с модификациями. Лучшим способом показать, что это была эволюция, а не революция, было по-прежнему называть это ССР, но с новой буквой режима. Режим S был очевидным выбором, где S означало «выбор». В 1983 году ИКАО выпустила рекомендательный циркуляр с описанием новой системы. [9]
Улучшенная антенна
[ редактировать ]Проблема с существующей стандартной антенной типа «корыто» была вызвана энергией, излучаемой в сторону земли, которая отражалась вверх и мешала направленной вверх энергии. Ответ заключался в том, чтобы придать форму вертикальному лучу. Это потребовало создания вертикальной дипольной решетки, питаемой соответствующим образом для получения желаемой формы. Вертикальный размер в пять футов оказался оптимальным и стал международным стандартом. [10]
Моноимпульсный вторичный радар наблюдения
[ редактировать ]
Система режима S была предназначена для работы только с одним ответом от самолета, система, известная как моноимпульс. На прилагаемой диаграмме показан обычный основной или «суммарный» луч антенны ССР, к которому добавлен «разностный» луч. Для создания суммарного луча сигнал распределяется горизонтально по апертуре антенны. Эта система подачи разделена на две равные половины, и две части снова суммируются для получения исходного суммарного луча. Однако две половины также вычитаются, чтобы получить разность выходных данных. Сигнал, поступающий на антенну точно по нормали или в направлении оси, будет давать максимальный выходной сигнал в суммарном луче и нулевой сигнал в разностном луче. Вдали от точки прицеливания сигнал в суммарном луче будет меньше, но в разностном луче будет ненулевой сигнал. Угол прихода сигнала можно определить путем измерения соотношения сигналов между суммарным и разностным лучами. Неоднозначность в отношении прицеливания может быть решена, поскольку по обе стороны от прицеливания имеется изменение фазы на 180°. Измерения пеленга могут выполняться по одному импульсу, то есть по моноимпульсу, но точность можно повысить путем усреднения измерений, выполненных по нескольким или всем импульсам, полученным в ответе от самолета. Моноимпульсный приемник [15] был разработан в начале программы Adsel в Великобритании и этот дизайн до сих пор широко используется. Импульсы ответа в режиме S намеренно разработаны так, чтобы быть похожими на ответы в режимах A и C, поэтому один и тот же приемник может использоваться для обеспечения улучшенного измерения пеленга для системы ВОРЛ в режимах A и C с тем преимуществом, что частота запросов может быть существенно уменьшена, тем самым уменьшая помехи, причиняемые другим пользователям системы. [19]
Лаборатория Линкольна использовала возможность отдельного измерения пеленга для каждого ответного импульса, чтобы преодолеть некоторые проблемы искажений, из-за которых два ответа перекрываются, что приводит к связыванию импульсов с двумя ответами. Поскольку каждому импульсу отдельно помечено направление, эту информацию можно использовать для расшифровки двух перекрывающихся ответов в режиме A или C. Этот процесс представлен в ATC-65 «Режим ATCRBS DABS». [20] Этот подход можно развивать дальше, измеряя силу каждого ответного импульса и используя ее в качестве дискриминанта. [1] В следующей таблице сравниваются характеристики обычного SSR, моноимпульсного SSR (MSSR) и режима S. [19]
| Стандартный ССР | Моноимпульсное ССР | Режим S | |
|---|---|---|---|
| Ответов за сканирование | 20–30 | 4–8 | 1 |
| Точность диапазона | 230 м среднеквадратичное значение | 13 м среднеквадратичное значение | 7 м среднеквадратичное значение |
| Точность подшипника | 0,08° среднеквадратичное значение | 0,04° среднеквадратичное значение | 0,04° среднеквадратичное значение |
| Разрешение по высоте | 100 футов (30 м) | 100 футов | 25 футов (7,6 м) |
| Устойчивость к испорчению | Бедный | Хороший | Лучший |
| Емкость данных (восходящая линия связи) | 0 | 0 | 56 – 1280 бит |
| Емкость данных (нисходящая линия связи) | 23 бита | 23 бита | 56 – 1280 бит |
| Перестановки идентичности | 4,096 | 4,096 | 16 миллионов |
MSSR заменил большинство существующих SSR к 1990-м годам, и его точность обеспечила сокращение минимума эшелонирования при УВД на маршруте с 10 морских миль (19 км; 12 миль) до 5 морских миль (9,3 км; 5,8 миль). [21]
MSSR решила многие системные проблемы SSR, поскольку требовались изменения только в наземной системе. Существующие транспондеры, установленные в самолетах, не пострадали. Это, несомненно, привело к задержке режима S. [16]
Режим S
[ редактировать ]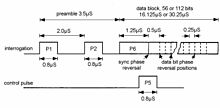

Более подробное описание режима S приведено в публикации Евроконтроля «Принципы режима S и коды запросчиков». [8] и циркуляр ИКАО 174-AN/110, рекомендательный циркуляр по вторичному обзорному радару режима S. [9] 16 миллионов перестановок 24-битных адресных кодов самолетов были распределены блоками по отдельным государствам, и их присвоение дано в Приложении 10 ИКАО, том III, глава 9. [17]
Запрос в режиме S состоит из двух импульсов длительностью 0,8 мкс. [18] которые интерпретируются транспондером режимов A и C как исходящие от бокового лепестка антенны, и поэтому ответ не требуется. Следующий длинный импульс P6 модулируется по фазе с первым обращением фазы через 1,25 мкс, синхронизируя фазовый детектор транспондера. Последующие изменения фазы указывают на бит данных, равный 1, при этом отсутствие изменения фазы указывает на бит со значением 0. Эта форма модуляции обеспечивает некоторую устойчивость к искажению из-за случайного перекрытия импульса от другого наземного запросчика. Запрос может быть коротким с P6 = 16,125 мкс, в основном используемым для получения обновления положения, или длинным, P6 = 30,25 мкс, если включены дополнительные 56 битов данных. Последние 24 бита содержат как четность, так и адрес самолета. Получив запрос, самолет раскодирует данные и вычислит четность. Если остаток не является адресом самолета, то либо запрос не предназначался для него, либо он был поврежден. В любом случае он не ответит. Если наземная станция ожидала ответа и не получила его, она повторит запрос. [9]
Ответ самолета [18] состоит из преамбулы из четырех импульсов, расположенных так, чтобы они не могли быть ошибочно сформированы из перекрывающихся ответов в режиме A или C. Остальные импульсы содержат данные с использованием амплитудной модуляции положения импульса . Каждый интервал 1 мкс делится на две части. Если импульс длительностью 0,5 мкс занимает первую половину, а во второй половине импульс отсутствует, то отображается двоичная 1. Если наоборот, то он представляет собой двоичный 0. Фактически данные передаются дважды, второй раз в инвертированной форме. Этот формат очень устойчив к ошибкам из-за искаженного ответа от другого самолета. Чтобы вызвать серьезную ошибку, один импульс должен быть отменен, а второй импульс вставлен в другую половину битового периода. Гораздо более вероятно, что обе половины перепутаны и декодированный бит помечен как «низкая достоверность». [20]
Ответ также имеет четность и адрес в последних 24 битах. Наземная станция отслеживает самолет и использует прогнозируемое положение для указания дальности и пеленга самолета, чтобы она могла снова выполнить опрос и получить обновленную информацию о своем местоположении. Если он ожидает ответа и если он его получает, он сверяет остаток от проверки четности с адресом ожидаемого воздушного судна. Если это не то же самое, то либо это не тот самолет, и необходим повторный запрос, либо ответ был искажен в результате вмешательства, поскольку он был искажен другим ответом. Система контроля четности способна исправлять ошибки, если они не превышают 24 мкс, что соответствует продолжительности ответа в режиме A или C, наиболее ожидаемого источника помех на заре режима S. Импульсы в ответе иметь отдельные измерения угла моноимпульса, а в некоторых реализациях также измерения уровня сигнала, которые могут указывать биты, которые несовместимы с большинством других битов, тем самым указывая на возможное искажение. Проверка выполняется путем инвертирования состояния некоторых или всех этих битов (0 меняется на 1 или наоборот), и если проверка четности теперь успешна, изменения становятся постоянными и ответ принимается. В случае неудачи требуется повторный допрос. [9]
Режим S работает по принципу, что запросы направляются конкретному воздушному судну с использованием уникального адреса этого воздушного судна. В результате получается один ответ, дальность полета самолета определяется временем, затраченным на получение ответа, и моноимпульс, обеспечивающий точное измерение пеленга. Для допроса воздушного судна необходимо знать его адрес. Чтобы удовлетворить этому требованию, наземный запросчик также транслирует запросы All-Call, которые бывают двух видов. [9]

В одной из форм общий вызов в режиме A/C/S сначала выглядит как обычный запрос в режиме A или C, и транспондер начинает процесс ответа при получении импульса P3. Однако транспондер режима S прервет эту процедуру при обнаружении импульса P4 и вместо этого ответит коротким ответом режима S, содержащим его 24-битный адрес. Эта форма опроса общего вызова в настоящее время широко не используется, поскольку она будет продолжать получать ответы от уже известных самолетов и вызывать ненужные помехи. Альтернативная форма общего вызова использует короткий запрос в режиме S с блоком данных длительностью 16,125 мкс. Это может включать в себя указание на то, что запросчик передает общий вызов, с просьбой о том, что если воздушное судно уже ответило этому запросчику, то не отвечайте снова, поскольку воздушное судно уже известно и ответ не нужен. [9]
Запрос в режиме S может принимать три формы:
| Имя | Форма | Использовать |
|---|---|---|
| Наблюдение | Короткий | Обновление позиции |
| Комм-А | Длинный | Содержит 56 бит данных |
| Комм-С | Длинный | До 16 длинных запросов, объединенных вместе, для передачи до 1280 бит. |
Первые пять битов, известные как поле восходящей линии связи (UF), в блоке данных указывают тип запроса. Последние 24 бита в каждом случае представляют собой комбинацию адреса воздушного судна и четности. Не все перестановки еще выделены, но показаны те, которые были: [9]
| Поле восходящей линии связи (UF) | Приложение | |
|---|---|---|
| Двоичный | Десятичный | |
| 00000 | 0 | Кратковременное наблюдение воздух-воздух (TCAS) |
| 00100 | 4 | Наблюдение, запрос высоты |
| 00101 | 5 | Наблюдение, режим А, запрос идентификации |
| 01011 | 11 | Только режим S |
| 10000 | 16 | Длительное наблюдение воздух-воздух (TCAS) |
| 10100 | 20 | Comm-A, включая запрос высоты |
| 10101 | 21 | Comm-A, включая запрос идентификации в режиме A |
| 11000 | 24 | Comm-C (сообщение расширенной длины) |
Аналогично, ответ в режиме S может принимать три формы: [9]
| Имя | Форма | Использовать |
|---|---|---|
| Наблюдение | Короткий | Обновление позиции |
| Комм-Б | Длинный | Содержит 56 бит данных |
| Комм-Д | Длинный | До 16 длинных запросов, объединенных вместе, для передачи до 1280 бит. |
Первые пять битов, известные как поле нисходящей линии связи (DF), в блоке данных указывают тип ответа. Последние 24 бита в каждом случае представляют собой комбинацию адреса воздушного судна и четности. Было выделено одиннадцать перестановок. [9]
| Поле нисходящей линии связи (DF) | Приложение | |
|---|---|---|
| Двоичный | Десятичный | |
| 00000 | 0 | Кратковременное наблюдение воздух-воздух (TCAS) |
| 00100 | 4 | Наблюдение, ответ на высоту |
| 00101 | 5 | Наблюдение, режим А идентификационный ответ |
| 01011 | 11 | Ответ All-Call, содержащий адрес воздушного судна |
| 10000 | 16 | Длительное наблюдение воздух-воздух (TCAS) |
| 10001 | 17 | Расширенный сквиттер |
| 10010 | 18 | ТИС-Б |
| 10011 | 19 | Военный расширенный сквиттер |
| 10100 | 20 | Ответ Comm-B, включая высоту |
| 10101 | 21 | Ответ Comm-B, включая идентификатор режима A |
| 10110 | 22 | Военное использование |
| 11000 | 24 | До 16 длинных ответов, объединенных вместе, для передачи до 1280 бит. |
Транспондер, оборудованный для передачи ответов Comm-B, оснащен 256 регистрами данных по 56 бит каждый. Содержимое этих регистров заполняется и поддерживается из бортовых источников данных. Если наземной системе требуются эти данные, она запрашивает их с помощью запроса наблюдения или связи. [9]
В главе 5 тома III Приложения 10 ИКАО перечислено содержание всех распределенных в настоящее время. Для текущего оперативного использования требуется меньшее количество. [22] [23] Остальные регистры предназначены для использования с TCAS и ADS-B. Номера селектора данных Comm-B (BDS) представлены в шестнадцатеричном формате.
| Зарегистрироваться | Данные |
|---|---|
| БДС 6,0 | Магнитный курс |
| БДС 6,0 | Приборная скорость полета |
| БДС 6,0 | число Маха |
| БДС 6,0 | Вертикальная скорость |
| БДС 5,0 | Угол крена |
| БДС 5,0 | Скорость угла колеи |
| БДС 5,0 | Истинный угол колеи |
| БДС 5,0 | Скорость относительно земли |
| БДС 4,0 | Выбранное вертикальное намерение |
Расширенный сквиттер
[ редактировать ]Начиная с 2009 года ИКАО определила «длительный самогенерируемый сигнал »; режим работы [24] он дополняет требования, содержащиеся в томах III и IV Приложения 10 ИКАО. В первом издании указаны более ранние версии расширенных самогенерируемых сообщений:
- Версия 0
- Расширяет режим S для работы с базовыми обменами ADS-B, добавляя информацию о формате широковещательной передачи информации о дорожном движении (TIS-B), а также информацию протокола широковещательной передачи по восходящей и нисходящей линии связи.
- Версия 1
- Лучше описывает информацию о точности и целостности наблюдения (категория точности навигации, категория целостности навигации, уровень целостности наблюдения), а также дополнительные параметры для TIS-B и ADS-B (ADS-R). ретрансляции
- Версия 2
- Во втором издании представлена новая версия форматов и протоколов расширенного самогенерируемого сигнала для: [25]
- повысить целостность и точность отчетности
- добавить ряд дополнительных параметров для поддержки выявленных эксплуатационных потребностей в использовании ADS-B, не предусмотренных Версией 1 (включая возможности поддержки наземных приложений аэропорта).
- изменить несколько параметров и удалить ряд параметров, которые больше не требуются для поддержки приложений ADS-B
См. также
[ редактировать ]- Радиолокационная система управления воздушным движением , полное описание
- Автоматическое зависимое наблюдение-трансляция , улучшение свободного полета
- Система предотвращения дорожно-транспортных происшествий
- Транспондерная система посадки
- Код Гиллхема
Ссылки
[ редактировать ]- ^ Перейти обратно: а б с Вторичный радар наблюдения , Stevens MC Artech House, ISBN 0-89006-292-7
- ^ «Системы наблюдения за обслуживанием воздушного движения, включая объяснение основных и вторичных радиолокаторов» . www.airwaysmuseum.com . Проверено 20 июня 2009 г.
- ^ «РАДАР УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ» . Аргос Пресс. Архивировано из оригинала 18 сентября 2009 г. Проверено 20 июня 2009 г.
- ^ «Вторичный радар наблюдения в системах УВД: описание преимуществ и последствий для диспетчера внедрения средств ВОРЛ» . Авиастроение и аэрокосмические технологии . Проверено 20 июня 2009 г.
- ^ Иллман, Пол Э. (1998). Справочник пилота по радиосвязи (пятое издание, мягкая обложка) . МакГроу-Хилл. п. 111. ИСБН 0-07-031832-8 .
- ^ Справочник по полетам по приборам . Министерство транспорта США, ФАУ. 2008. С. 3–7 .
- ^ Перейти обратно: а б с д и Приложение 10 ИКАО, том IV
- ^ Перейти обратно: а б Принципы работы режима S и коды запросчиков
- ^ Перейти обратно: а б с д и ж г час я дж к л м н тот Циркуляр ИКАО 174-AN/110. Консультативный циркуляр по вторичному обзорному радару режима S.
- ^ Перейти обратно: а б Стивенс, MC «Многолучевое распространение и эффекты помех во вторичных радиолокационных системах», Proc. Инст.электр. англ., часть F, 128(1), 43–53, 1981 г.
- ^ Уллиатт, К. Вторичный радар в эпоху автоматического слежения , IEE Comf. Паб., 28, 140, 1967 г.
- ^ Перейти обратно: а б Уллиатт, К. Датчики для среды УВД со специальным акцентом на ССР , Электрон. Гражданский авиат., 3, С1–С3, 1969 г.
- ^ Стивенс, MC, Вторичный радар наблюдения - сегодня и завтра , Симпозиум SERT по авионике, Суонси, июль 1974 г.
- ^ Перейти обратно: а б Bowes RC, Drouilhet PR, Weiss HG и Stevens MC, ADSEL/DABS - A Selective Address Secondary Surveillance Radar , Материалы конференции AGARD № 188. 20-й симпозиум Группы управления и контроля, проходивший в Кембридже, Массачусетс, США, 20–23 мая. 1975 год
- ^ Перейти обратно: а б Стивенс, MC Precision вторичный радар , Proc. Инст. Электр. Англ., 118(12), 1729–1735, 1971.
- ^ Перейти обратно: а б История режима S: технология передачи данных управления воздушным движением : режим S сегодня, Чанг Э., Ху Р., Лай Д., Ли Р., Скотт К., Тянь Т., декабрь 2000 г.
- ^ Перейти обратно: а б «Приложение 10 ИКАО, том III: Глава 9. Система адресации воздушных судов» (PDF) . Приложение 10 ИКАО . ИКАО. Архивировано из оригинала (PDF) 22 ноября 2008 г. Проверено 2 июня 2017 г.
- ^ Перейти обратно: а б с Орландо, Вирджиния; Друйе PR (август 1986 г.). «Система радиомаяков режима S ATC-42: функциональное описание (редакция D)» (PDF) . Линкольнская лаборатория. Архивировано из оригинала (PDF) 2 октября 2012 года . Проверено 29 марта 2014 г.
- ^ Перейти обратно: а б Стивенс, MC Наблюдение в эпоху режима S , Симпозиум CAA/IEE по УВД, Лондон. март 1990 г.
- ^ Перейти обратно: а б Герц Дж.Л. (январь 1977 г.). «ATC-65 Режим ATCRBS для DABS» (PDF) . Лаборатория Линкольна (MIT). Архивировано из оригинала (PDF) 5 марта 2016 года . Проверено 29 марта 2014 г.
- ^ ФАУ (2004). План капитальных вложений авиационной системы . Издательство ДИАНА. ISBN 978-0-7881-3348-0 .
- ^ Руководство по конкретным услугам режима S, Рабочая группа B по системам наблюдения и разрешения конфликтов , сентябрь 2001 г.
- ^ Перевозка транспондеров режима S ВОРЛ для рейсов IFR, выполняемых в качестве общего движения , www.caa.co.uk/docs/810/
- ^ ИКАО (2008). Doc 9871 ИКАО, Технические положения для режима S и расширенного самогенерируемого сигнала (1-е изд.). Международная организация гражданской авиации. ISBN 978-92-9231-117-9 .
- ^ ИКАО (2012). Doc 9871 ИКАО, Технические положения для режима S и расширенного самогенерируемого сигнала (2-е изд.). Международная организация гражданской авиации. ISBN 978-92-9249-042-3 .
Дальнейшее чтение
[ редактировать ]- Отраслевые характеристики
- Приложение 10 - Том IV - Обзорные радары и системы предотвращения столкновений. Архивировано 6 мая 2014 г. в Wayback Machine ; 4-е издание; ИКАО; 280 страниц; 2007.
- DO-181E Минимальные стандарты эксплуатационных характеристик для бортового оборудования ATCRBS/режима S ; Ред. Е; РТКА; 2011.
Внешние ссылки
[ редактировать ]- Усовершенствованная система управления наземным движением и наземным управлением Eurocontrol (A-SMGCS)
- Справочник Евроконтроля Режим S Домашняя страница
- Основы радара
- "ATCRBS" статья 1961 года Летная о ССР.
| Базы данных органов управления : Национальные |
|---|