Трилатерация
Трилатерация — это использование расстояний (или «диапазонов») для определения неизвестных координат положения , интересующей точки часто вокруг Земли ( геопозиционирование ). [1] Когда задействовано более трех расстояний, это можно назвать мультилатерацией для акцента .
Расстояния или диапазоны могут быть обычными евклидовыми расстояниями ( наклонными диапазонами ) или сферическими расстояниями (масштабированные центральные углы ), как в мультилатерации истинного диапазона ; или смещенные расстояния ( псевдодальность ), как в мультилатерации псевдодальностей .
Трилатерацию или мультилатерацию не следует путать с триангуляцией используются углы , в которой для позиционирования ; и пеленгация , которая определяет направление прямой видимости на цель без определения радиального расстояния .
Терминология
[ редактировать ]Для обозначения аналогичных концепций используются многочисленные, иногда перекрывающиеся и противоречивые термины – например, мультилатерация без изменений использовалась для авиационных систем, использующих как истинные, так и псевдодальности. [2] [3] Более того, в разных областях деятельности могут использоваться разные термины. В геометрии , трилатерация определяется как процесс определения абсолютного или относительного местоположения точек путем измерения расстояний с использованием кругов геометрии сфер или треугольников . В геодезии трилатерация представляет собой особый метод. [4] [5] [6]
Мультилатерация истинного диапазона
[ редактировать ]Мультилатерация истинного диапазона (также называемая мультилатерацией дальности-диапазона и сферической мультилатерацией) — это метод определения местоположения подвижного транспортного средства или неподвижной точки в пространстве с использованием нескольких диапазонов ( расстояний ) между транспортным средством/точкой и несколькими пространственно разделенными известными местоположениями ( часто называют «станциями»). [7] [8] Энергетические волны могут участвовать в определении дальности, но это не обязательно.
Мультилатерация истинного диапазона — это одновременно математическая тема и прикладной метод, используемый в нескольких областях. Практическое применение, связанное с фиксированным местоположением, встречается при геодезии . [9] [10] Приложения, связанные с определением местоположения транспортного средства, называются навигацией, когда находящиеся на борту люди/оборудование информируются о его местонахождении, и называются наблюдением, когда объекты, находящиеся вне транспортного средства, информируются о местонахождении транспортного средства.
Два наклонных диапазона из двух известных мест можно использовать для определения местоположения третьей точки в двумерном декартовом пространстве (плоскости), что является часто применяемым методом (например, при геодезии). Точно так же два сферических диапазона можно использовать для определения местоположения точки на сфере, что является фундаментальной концепцией древней дисциплины небесной навигации , называемой проблемой перехвата высоты . Более того, если доступно больше минимального количества диапазонов, рекомендуется использовать и их. В этой статье рассматривается общий вопрос определения позиции с использованием нескольких диапазонов.
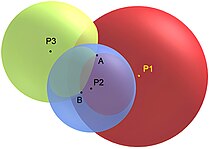
В двумерной геометрии известно, что если точка лежит на двух окружностях, то центры окружностей и два радиуса предоставляют достаточную информацию, чтобы сузить возможные местоположения до двух — одно из которых является искомым решением, а другое — неоднозначное решение. Дополнительная информация часто сужает возможности до уникального местоположения. В трехмерной геометрии, когда известно, что точка лежит на поверхностях трех сфер, центры трех сфер вместе с их радиусами также предоставляют достаточную информацию, чтобы сузить возможные местоположения не более чем до двух (если только центры лежат на прямой).
Мультилатерацию истинного диапазона можно противопоставить более часто встречающейся мультилатерации псевдодальности , которая использует разницу дальностей для определения местоположения (обычно подвижной) точки. Мультилатерация псевдодальности почти всегда реализуется путем измерения времени прибытия (TOA) энергетических волн. Мультилатерацию истинного диапазона также можно противопоставить триангуляции , которая включает измерение углов .Мультилатерация псевдодальности
[ редактировать ]Мультилатерация псевдодальности , часто просто мультилатерация (MLAT) в контексте, представляет собой метод определения положения неизвестной точки, такой как транспортное средство, на основе измерения времени прибытия (TOA) энергетических волн, перемещающихся между неизвестными. точка и несколько станций в известных местах. Когда волны передаются транспортным средством, MLAT используется для наблюдения ; когда волны передаются станциями, для навигации используется MLAT ( гиперболическая навигация ). В любом случае предполагается, что часы станций синхронизированы, а часы автомобиля — нет.
До вычисления решения общее время передачи (TOT) волн неизвестно приемнику(ам) ни на транспортном средстве (один приемник, навигация), ни на станциях (несколько приемников, наблюдение). Следовательно, неизвестны также времена полета волны (TOF) – дальность полета аппарата от станций, деленная на скорость распространения волны. Каждая псевдодальность представляет собой соответствующее значение TOA, умноженное на скорость распространения с добавлением той же произвольной константы (представляющей неизвестный TOT).
В навигационных приложениях транспортное средство часто называют «пользователем»; в приложениях для наблюдения транспортное средство можно назвать «целью». Для математически точного решения диапазоны не должны меняться в течение периода приема сигналов (между первым и последним, пришедшим на приемник). Таким образом, для навигации точное решение требует неподвижного транспортного средства; однако мультилатерация часто применяется для навигации движущихся транспортных средств, скорость которых значительно меньше скорости распространения волн.
Если - количество рассматриваемых физических измерений (таким образом, искомые координаты транспортного средства) и — количество полученных сигналов (таким образом, измеренных TOA), требуется, чтобы . Тогда основной набор уравнения измерения:



- в ТОА ( измерения) = TOF ( неизвестные переменные, встроенные в выражения) + TOT (реплицируется одна неизвестная переменная) раз).
Обработка обычно требуется для извлечения TOA или их отличий из полученных сигналов, а алгоритм для решения этого набора уравнений обычно требуется . Алгоритм либо: (а) определяет числовые значения для TOT (для часов приемника(ов)) и координаты автомобиля; или (б) игнорирует ТОТ и формирует (по меньшей мере ) разница во времени прибытия (TDOA), которая используется для нахождения координаты автомобиля. Почти всегда, (например, плоскость или поверхность сферы) или (например, реальный физический мир). Системы, образующие TDOA, также называются гиперболическими системами. [11] по причинам, обсуждаемым ниже.



Мультилатерационная навигационная система предоставляет информацию о местоположении транспортного средства объекту, находящемуся «на» транспортном средстве (например, пилоту воздушного судна или оператору приемника GPS). Система многолатерального наблюдения предоставляет информацию о местонахождении транспортного средства объекту, «не находящемуся» в транспортном средстве (например, авиадиспетчеру или оператору сотовой связи). По принципу взаимности любой метод, который можно использовать для навигации, можно использовать и для наблюдения, и наоборот (используется одна и та же информация).
Системы были разработаны как для алгоритмов TOT, так и для TDOA (которые игнорируют TOT). В этой статье в первую очередь рассматриваются алгоритмы TDOA, поскольку они были реализованы первыми. Благодаря технологиям, доступным в то время, системы TDOA часто определяли местоположение транспортного средства в двух измерениях. Системы ТОТ рассматриваются на втором месте. Они были реализованы примерно после 1975 года и обычно связаны со спутниками. Благодаря развитию технологий алгоритмы TOT обычно определяют местоположение пользователя/транспортного средства в трех измерениях. Однако концептуально алгоритмы TDOA или TOT не связаны с количеством задействованных измерений.Ссылки
[ редактировать ]- ^ Инженеры, АСК (1994). Глоссарий картографических наук . Американское общество инженеров-строителей. п. 548. ИСБН 978-0-7844-7570-6 . Проверено 7 ноября 2022 г.
- ^ «Концепция использования мультилатерации (MLAT)», Международная организация гражданской авиации, 2007 г.
- ^ «Основы радара» , Кристиан Вольф, без даты.
- ^ Британская энциклопедия
- ^ diracdelta. Архивировано 12 августа 2010 г. в Wayback Machine.
- ^ бесплатный словарь
- ^ Ограничения точности мультилатеральных (сферических) систем дальности-диапазона , Гарри Б. Ли, Массачусетский технологический институт, Лаборатория Линкольна, Номер отчета: DOT/TSC-RA-3-8-(1) (Техническое примечание 1973-43), 11 октября 1973 г.
- ^ « Ро-Ро Лоран-C в сочетании со спутниковой навигацией для морских исследований ». ST Grant, Международное гидрографическое обозрение , без даты
- ^ Виртанен, Теодор Х. (1969). «Лазерная мультилатерация». Журнал Отдела геодезии и картографии . 95 (1). Американское общество инженеров-строителей (ASCE): 81–92. дои : 10.1061/jsueax.0000322 . ISSN 0569-8073 .
- ^ Эскобал, PR; Флигель, ХФ; Яффе, РМ; Мюллер, премьер-министр; Онг, К.М.; Вонроос, Огайо (07 августа 2013 г.). «Трехмерная мультилатерация: система прецизионных геодезических измерений» . JPL Кварта. Тех. Преподобный . 2 (3) . Проверено 6 ноября 2022 г.
- ^ Прок, Джерри (2021). «Гиперболические радионавигационные системы» . Проверено 11 апреля 2022 г.