График полюс – ноль
В математике , теории обработки сигналов и теории управления график полюс -ноль представляет собой графическое представление рациональной передаточной функции в комплексной плоскости , которое помогает передать определенные свойства системы, такие как:
- Стабильность
- Причинная система / антипричинная система
- Область конвергенции (ROC)
- Минимальная фаза /не минимальная фаза
График полюс-ноль показывает расположение в комплексной плоскости полюсов и нулей передаточной функции динамической системы , такой как контроллер, компенсатор, датчик, эквалайзер, фильтр или канал связи. По соглашению полюса системы обозначаются на графике буквой X, а нули обозначаются кружком или О.
График полюс-ноль строится в плоскости комплексной частотной области , которая может представлять собой систему с непрерывным или дискретным временем:
- Системы с непрерывным временем используют преобразование Лапласа и отображаются в s-плоскости :
- Реальные компоненты частоты располагаются вдоль вертикальной оси (воображаемая линия где )
- Системы дискретного времени используют Z-преобразование и отображаются в z-плоскости :
- Компоненты реальной частоты расположены вдоль единичной окружности.




Системы непрерывного времени
[ редактировать ]В общем случае рациональная с непрерывным временем передаточная функция для системы LTI имеет вид:

где
- и являются полиномами в ,
- - порядок полинома числителя,
- это й коэффициент полинома числителя,
- - порядок полинома знаменателя, а
- это й коэффициент полинома знаменателя.









Или или или оба могут быть равны нулю, но в реальных системах должно быть так, что ; в противном случае усиление было бы неограниченным на высоких частотах.

Полюсы и нули
[ редактировать ]- нули системы являются корнями полинома числителя: такой, что
- полюса системы являются корнями многочлена знаменателя: такой, что




Область конвергенции
[ редактировать ]Область сходимости (ROC) для данной передаточной функции с непрерывным временем представляет собой полуплоскость или вертикальную полосу, каждая из которых не содержит полюсов. В общем, ROC не уникален, и конкретный ROC в каждом конкретном случае зависит от того, является ли система причинной или антикаузальной.
- Если ROC включает воображаемую ось , то система является стабильной с ограниченным входом и ограниченным выходом (BIBO) .
- Если ROC простирается вправо от полюса с наибольшей действительной частью (но не на бесконечности), то система является причинной.
- Если ROC простирается влево от полюса с наименьшей действительной частью (но не на отрицательной бесконечности), то система является антикаузальной.
ROC обычно выбирают с включением воображаемой оси, поскольку для большинства практических систем важно иметь стабильность BIBO .
Пример
[ редактировать ]

Эта система не имеет (конечных) нулей и двух полюсов: и


График полюс-ноль будет выглядеть следующим образом:
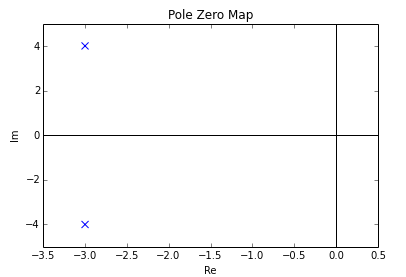
Обратите внимание, что эти два полюса являются комплексно-сопряженными , что является необходимым и достаточным условием наличия действительных коэффициентов в дифференциальном уравнении, представляющем систему.
Системы дискретного времени
[ редактировать ]с дискретным временем В общем случае рациональная передаточная функция для системы LTI имеет вид:

где
- - порядок полинома числителя,
- это й коэффициент полинома числителя,
- - порядок полинома знаменателя, а
- это й коэффициент полинома знаменателя.
Или или или оба могут быть нулевыми.
Полюсы и нули
[ редактировать ]



Область конвергенции
[ редактировать ]Область сходимости (ROC) для данной передаточной функции дискретного времени представляет собой диск или кольцо , не содержащее несократившихся полюсов. В общем, ROC не уникален, и конкретный ROC в каждом конкретном случае зависит от того, является ли система причинной или антикаузальной.
- Если ROC включает в себя единичный круг , то система является стабильной с ограниченным входом и ограниченным выходом (BIBO) .
- Если ROC простирается наружу от полюса с наибольшей (но не бесконечной) величиной, то система имеет правостороннюю импульсную характеристику. Если ROC простирается наружу от полюса с наибольшей величиной и на бесконечности нет полюса, то система является причинной.
- Если ROC простирается внутрь от полюса с наименьшей (ненулевой) величиной, то система является антикаузальной.
ROC обычно выбирается с включением единичного круга, поскольку для большинства практических систем важно иметь стабильность BIBO .
Пример
[ редактировать ]Если и полностью факторизованы, их решение можно легко построить в плоскости z . Например, учитывая следующую передаточную функцию:



Единственный (конечный) ноль расположен по адресу: , а два полюса расположены по адресу: , где это мнимая единица .



График полюс-ноль будет выглядеть следующим образом:

См. также
[ редактировать ]Библиография
[ редактировать ]- Хааг, Майкл (22 июня 2005 г.). «Понимание графиков полюса/нуля на плоскости Z» . OpenStax CNX . Проверено 9 июня 2018 г. [ мертвая ссылка ]
- Эрик В. Вайсштейн . «Z-трансформация» . Математический мир . Проверено 24 января 2010 г.