Система контроля реакции
Эта статья нуждается в дополнительных цитатах для проверки . ( сентябрь 2014 г. ) |

Система управления реакцией ( RCS ) – это система космического корабля, которая использует двигатели для управления ориентацией и перемещения . В качестве альтернативы реактивные колеса для управления ориентацией используются . Использование отклонения тяги двигателя для обеспечения стабильного управления ориентацией самолета с коротким или вертикальным взлетом и посадкой ниже скорости полета обычных крылатых самолетов, например, с «прыжковым реактивным самолетом» Harrier , также может называться системой управления реакцией.
Системы управления реакцией способны обеспечивать небольшую тягу в любом желаемом направлении или комбинации направлений. RCS также способна обеспечивать крутящий момент , позволяющий контролировать вращение ( крен, тангаж и рысканье ). [1]
В системах управления реакцией часто используются комбинации больших и малых ( нониусных ) двигателей, чтобы обеспечить разные уровни реагирования.
Использование
[ редактировать ]Системы управления реакцией космического корабля используются для:
- контроль ориентации на разных этапах миссии; [2]
- удержание станции на орбите ;
- близкое маневрирование во время стыковки ;
- контроль ориентации , или «наведение носа» корабля;
- резервное средство схода с орбиты ;
- незаполненные двигатели для заправки топливной системы на случай сгорания основного двигателя.
Поскольку космические корабли содержат только ограниченное количество топлива и вероятность их пополнения мала, были разработаны альтернативные системы управления реакцией, позволяющие экономить топливо. Для поддержания местоположения некоторые космические корабли (особенно на геостационарной орбите ) используют высокоспецифичные импульсные двигатели, такие как дуговые двигатели , ионные двигатели или двигатели на эффекте Холла . Для управления ориентацией некоторые космические корабли, в том числе МКС , используют импульсные колеса , которые вращаются, чтобы контролировать скорость вращения корабля.
Расположение двигателей на космическом корабле
[ редактировать ]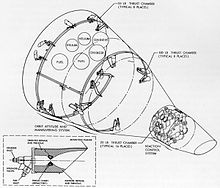
Космическая «Меркурий» капсула и возвращаемый модуль «Джемини» использовали группы сопел для обеспечения ориентации . Двигатели располагались не от центра масс , что обеспечивало крутящий момент для вращения капсулы. Капсула «Джемини» также была способна корректировать курс входа в атмосферу путем крена, что направляло ее подъемную силу не от центра. [ нужны разъяснения ] В двигателях «Меркурий» использовалось монотопливо на основе перекиси водорода , которое превращалось в пар при прохождении через вольфрамовый экран, а в двигателях «Джемини» использовалось гиперголическое монометилгидразиновое топливо, окисленное четырехокисью азота .
Космический корабль «Джемини» также был оснащен гиперголической орбитальной системой ориентации и маневрирования , что сделало его первым космическим кораблем с экипажем, способным как поступательно, так и вращательно. Управление ориентацией на орбите достигалось за счет запуска пар из восьми двигателей с усилием 25 фунтов (110 Н), расположенных по окружности переходного модуля на крайнем кормовом конце. Управление боковым перемещением обеспечивалось четырьмя двигателями мощностью 100 фунтов (440 Н) по окружности на переднем конце переходного модуля (близко к центру масс космического корабля). Два направленных вперед подруливающих устройства с усилием 85 фунтов (380 Н) в одном и том же месте обеспечивали перемещение назад, а два подруливающих устройства с усилием 100 фунтов (440 Н), расположенные в кормовой части переходного модуля, обеспечивали тягу вперед, что могло использоваться для изменения орбиты корабля. Модуль входа в атмосферу «Джемини» также имел отдельную систему управления входом в атмосферу из шестнадцати двигателей, расположенных в основании его носовой части, для обеспечения управления вращением во время входа в атмосферу.
Командный модуль «Аполлона» имел набор из двенадцати гиперголических двигателей для управления ориентацией и управления входом в атмосферу, аналогичный «Джемини».
«Аполлон» Служебный модуль и лунный модуль имели набор из шестнадцати гиперголических двигателей R-4D , сгруппированных во внешние группы по четыре штуки, чтобы обеспечить как перемещение, так и управление ориентацией. Кластеры располагались вблизи средних центров масс корабля и запускались парами в противоположных направлениях для контроля ориентации.
Пара поступательных двигателей расположена в хвостовой части космического корабля «Союз»; Противодействующие двигатели аналогичным образом соединены в пары в середине космического корабля (около центра масс), направленные наружу и вперед. Они действуют парами, предотвращая вращение космического корабля. Двигатели боковых направлений установлены близко к центру масс корабля, также попарно. [ нужна ссылка ]
Расположение двигателей на космических самолетах
[ редактировать ]
Суборбитальный X-15 и сопутствующий учебный аэрокосмический корабль NF-104 AST , оба предназначенные для полета на высоту, которая делала их аэродинамические поверхности управления непригодными для использования, установили соглашение о местах для двигателей на крылатых аппаратах, не предназначенных для стыковки в космосе. ; то есть те, у которых есть только двигатели ориентации. Датчики тангажа и рыскания расположены в носовой части, в передней части кабины, и заменяют стандартную радиолокационную систему. Те, что отвечают за крен, расположены на законцовках крыла. X -20 , который должен был выйти на орбиту, продолжил эту схему.
В отличие от них, у орбитального корабля космического корабля было гораздо больше двигателей, которые были необходимы для управления положением корабля как во время орбитального полета, так и на ранней стадии входа в атмосферу, а также для выполнения маневров сближения и стыковки на орбите. Подруливающие устройства шаттла были сгруппированы в носовой части корабля и на каждой из двух кормовых капсул орбитальной системы маневрирования . Никакие сопла не прерывали тепловой экран на нижней части корабля; вместо этого носовые сопла RCS, регулирующие положительный шаг, были установлены сбоку от машины и были наклонены вниз. Направленные вниз подруливающие устройства отрицательного шага располагались в гондолах OMS, установленных в хвостовой части/кормовой части.
Системы Международной космической станции
[ редактировать ]На Международной космической станции используются гироскопы управляющего момента (CMG) с электрическим приводом для основного управления ориентацией, а системы двигателей RCS - в качестве резервных и дополнительных систем. [3] [ ненадежный источник? ]
Ссылки
[ редактировать ]- ^ «СИСТЕМА УПРАВЛЕНИЯ РЕАКЦИЕЙ» . science.ksc.nasa.gov .
- ^ Колас, Арманд Л.; Валенсуэла, Хуан Г. (17 августа 2020 г.), «Характеристика характеристик системы управления реакцией с использованием опорной стойки вакуумной камеры» , Форум AIAA Propulsion and Energy 2020 , AIAA Propulsion and Energy Forum, Американский институт аэронавтики и астронавтики, doi : 10.2514/ 6.2020-3526 , ISBN 978-1-62410-602-6 , S2CID 225270552 , получено 27 сентября 2022 г.
- ^ http://forum.nasaspaceflight.com/index.php?action=dlattach;topic=34777.0;attach=586775 [ источник, созданный пользователем ]
Внешние ссылки
[ редактировать ]- NASA.gov
- RCS космического корабля. Архивировано 24 мая 2009 г. в Wayback Machine.