Радар непрерывного действия
Радар непрерывного излучения ( CW радар ) — это тип радиолокационной энергия известной стабильной частоты системы, в которой непрерывная радиоволновая передается, а затем принимается от любых отражающих объектов. [1] Отдельные объекты могут быть обнаружены с помощью эффекта Доплера , который приводит к тому, что принимаемый сигнал имеет частоту, отличную от передаваемого сигнала, что позволяет его обнаружить путем фильтрации передаваемой частоты.
Доплеровский анализ отраженных сигналов радара может позволить отфильтровать медленные или неподвижные объекты, обеспечивая тем самым устойчивость к помехам от крупных стационарных объектов и медленно движущихся помех . [2] [3] Это делает его особенно полезным для поиска объектов на фоне отражателя, например, позволяя высоколетящему самолету искать самолеты, летящие на малых высотах, на фоне поверхности. Поскольку очень сильное отражение от поверхности можно отфильтровать, гораздо меньшее отражение от цели все равно можно увидеть.
Радиолокационные системы непрерывного действия используются на обоих концах спектра диапазона.
- Недорогие радиовысотомеры, датчики приближения и спортивные аксессуары, работающие на расстоянии от нескольких десятков футов до нескольких километров.
- Дорогостоящий радар раннего предупреждения CW с угловым слежением (CWAT), работающий на расстоянии более 100 км и предназначенный для использования с зенитно-ракетными комплексами.
Операция
[ редактировать ]Основное преимущество радаров непрерывного действия заключается в том, что энергия не является импульсной , поэтому их гораздо проще производить и эксплуатировать. У них нет минимального или максимального радиуса действия, хотя уровень мощности вещания накладывает практические ограничения на дальность действия. Радар непрерывного действия максимизирует общую мощность воздействия на цель, поскольку передатчик ведет непрерывную передачу.
Военные используют радар непрерывного действия для наведения с полуактивным радиолокационным самонаведением (SARH) ракет класса «воздух-воздух» , таких как американские AIM-7 Sparrow и семейство ракет Standard . Самолет-носитель освещает цель CW радиолокационным сигналом, а ракета наводится на отраженные радиоволны . Поскольку ракета движется с большой скоростью относительно самолета, наблюдается сильный доплеровский сдвиг. Большинство современных радаров воздушного боя, даже импульсно-доплеровские установки, имеют функцию CW для целей наведения ракет.
Максимальное расстояние в радаре непрерывного действия определяется общей полосой пропускания и мощностью передатчика. Эта полоса пропускания определяется двумя факторами.
- Плотность энергии передачи (ватты на герц)
- Размер фильтра приемника (пропускная способность, деленная на общее количество фильтров)
Удвоение мощности передачи увеличивает производительность на расстоянии примерно на 20%. Уменьшение общего шума передачи ЧМ вдвое дает тот же эффект.
Приемники в частотной области , используемые для приемников доплеровских радаров непрерывного действия, сильно отличаются от обычных приемников радаров. Приемник состоит из набора фильтров, обычно более 100. Количество фильтров определяет максимальную дальность действия.
Удвоение количества фильтров приемника увеличивает эффективность расстояния примерно на 20%. Максимальная производительность на расстоянии достигается, когда размер фильтра приемника равен максимальному ЧМ-шуму, присутствующему в передаваемом сигнале. Уменьшение размера фильтра приемника ниже среднего уровня шума передачи FM не улучшит дальность действия.
Говорят, что радар CW согласован , когда размер фильтра приемника соответствует среднеквадратичной полосе частот ЧМ-шума передаваемого сигнала.
Типы
[ редактировать ]Существует два типа радаров непрерывного действия: немодулированный непрерывный сигнал и модулированный непрерывный сигнал .
Немодулированный непрерывный сигнал
[ редактировать ]
Такой радар может стоить менее 10 долларов (2021 г.). Возвратные частоты смещаются от передаваемой частоты на основе эффекта Доплера при движении объектов. Нет возможности оценить расстояние. Этот тип радара обычно используется в спортивных соревнованиях, таких как гольф, теннис, бейсбол, гонки NASCAR , а также в некоторых устройствах для умного дома, включая лампочки и датчики движения.
Изменение доплеровской частоты зависит от скорости света в воздухе ( c' ≈ c/1,0003 немного медленнее, чем в вакууме) и v скорости цели: [4]

Таким образом, доплеровская частота равна: [5]

Поскольку обычное изменение скорости цели у радара гораздо меньше, чем , можно упростить с помощью :



Радар непрерывного действия без частотной модуляции (ЧМ) обнаруживает только движущиеся цели, поскольку неподвижные цели (вдоль линии визирования ) не вызывают доплеровского сдвига. Отраженные сигналы от неподвижных и медленно движущихся объектов маскируются передаваемым сигналом, который подавляет отражения от медленно движущихся объектов при нормальной работе.
Модулированный непрерывный сигнал
[ редактировать ]Радиолокатор непрерывного действия с частотной модуляцией (FM-CW) - также называемый радаром непрерывного действия с частотной модуляцией (CWFM) [6] – представляет собой измерительный радар ближнего действия, способный определять расстояние. Это повышает надежность, обеспечивая измерение расстояния наряду с измерением скорости, что важно, когда на антенну радара поступает более одного источника отражения. Этот тип радара часто используется в качестве « радарного высотомера » для измерения точной высоты во время процедуры посадки самолета. [7] Он также используется в качестве радара раннего предупреждения, волнового радара и датчиков приближения. Доплеровский сдвиг не всегда требуется для обнаружения при использовании FM. В то время как ранние разработки, такие как радар-высотомер 1940-х годов, были разработаны для коротких расстояний, радары за горизонтом (OTHR), такие как Оперативная радиолокационная сеть Джиндали (JORN), предназначены для исследования межконтинентальных расстояний в несколько тысяч километров. .
известной стабильной частоты В этой системе передаваемый сигнал непрерывной волны изменяется вверх и вниз по частоте в течение фиксированного периода времени с помощью модулирующего сигнала. Разница частот между сигналом приема и сигналом передачи увеличивается с задержкой и, следовательно, с расстоянием. Это размывает или размывает доплеровский сигнал. Эхо-сигналы от цели затем смешиваются с передаваемым сигналом для получения биения, который определяет расстояние до цели после демодуляции.
Возможны различные модуляции, частота передатчика может увеличиваться и уменьшаться следующим образом:
- Синусоидальная волна , как сирена воздушной тревоги.
- Пилообразная волна , словно щебетание птицы
- Треугольная волна , как полицейская сирена в США.
- Прямоугольная волна , как полицейская сирена в Соединенном Королевстве.
Диапазон демодуляции ограничен 1/4 длины волны модуляции передачи. Инструментальная дальность действия для FM 100 Гц составит 500 км. Этот предел зависит от типа модуляции и демодуляции. Обычно применяется следующее.

Радар будет сообщать неправильное расстояние для отражений от расстояний, выходящих за пределы диапазона измерения, например, от Луны. Измерения дальности FMCW надежны только примерно до 60% инструментального диапазона, или около 300 км для частоты 100 Гц FM.
Пилообразная частотная модуляция
[ редактировать ]



Пилообразная модуляция наиболее часто используется в радарах FM-CW, где требуется дальность действия для объектов, у которых нет вращающихся частей. С помощью этого метода информация о дальности смешивается с доплеровской скоростью. Модуляцию можно отключить при альтернативном сканировании для определения скорости с использованием немодулированного сдвига несущей частоты. Это позволяет определять дальность и скорость с помощью одного радара. Модуляцию треугольной волны можно использовать для достижения той же цели.
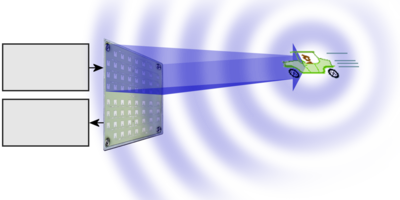
Как показано на рисунке, полученный сигнал (зеленый) представляет собой просто задержанную копию переданного сигнала (красный). Передаваемая частота используется для преобразования принимаемого сигнала в базовый диапазон , а величина сдвига частоты между передаваемым сигналом и отраженным сигналом увеличивается с временной задержкой (расстоянием). Таким образом, временная задержка является мерой дальности; небольшой разброс частот создается близлежащими отражениями, больший разброс частот соответствует большей временной задержке и большей дальности действия.
С появлением современной электроники цифровая обработка сигналов для большей части процессов обнаружения используется . Сигналы биений пропускаются через аналого-цифровой преобразователь , и результат подвергается цифровой обработке. Как поясняется в литературе, определение диапазона FM-CW для линейного линейного сигнала описывается следующей системой уравнений: [7]

- где - величина развертки частоты радара и это время завершения развертки частоты.


Затем, , переставлю на более полезный:

- , где — время прохождения энергии радара туда и обратно.


Тогда нетрудно вычислить физическое одностороннее расстояние для идеализированного типичного случая следующим образом:

- где — скорость света в любой прозрачной среде с показателем преломления n (n=1 в вакууме и 1,0003 для воздуха).

По практическим соображениям принимаемые выборки не обрабатываются в течение короткого периода после начала линейного изменения модуляции, поскольку входящие отражения будут иметь модуляцию из предыдущего цикла модуляции. Это накладывает ограничение на диапазон и ограничивает производительность.

Синусоидальная частотная модуляция
[ редактировать ]
Синусоидальная FM используется, когда одновременно требуются и дальность, и скорость для сложных объектов с несколькими движущимися частями, таких как лопасти вентилятора турбины, лопасти вертолета или пропеллеры. Эта обработка уменьшает эффект сложной спектральной модуляции, создаваемой вращающимися частями, которые вносят ошибки в процесс измерения дальности.
Преимущество этого метода также состоит в том, что приемнику никогда не требуется прекращать обработку входящих сигналов, поскольку форма сигнала модуляции является непрерывной и не имеет импульсной модуляции.
Синусоидальная ЧМ устраняется приемником при близких отражениях, поскольку частота передачи будет такой же, как частота, отражаемая обратно в приемник. Спектр более удаленных объектов будет содержать больше модуляции. Степень расширения спектра, вызванная модуляцией принимаемого сигнала, пропорциональна расстоянию до отражающего объекта.
Формула временной области для FM:
![{\displaystyle y(t)=\cos \left\{2\pi [f_{c}+\mathrm {B} \cos \left(2\pi f_{m}t\right)]t\right\} \,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/20a17a89ddb7ead804135633080c560c5afc6337)
- где (индекс модуляции)

При переходе между радаром и отражателем вводится временная задержка.
![{\displaystyle y(t)=\cos \left\{2\pi [f_{c}+\mathrm {B} \cos \left(2\pi f_{m}(t+\delta t)\right)] (t+\delta t)\right\}\,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a81f902951e8fadfedd127fca23ac60335717bab)
- где задержка времени

Процесс обнаружения преобразует принимаемый сигнал с использованием передаваемого сигнала. Это исключает перевозчика.
![{\displaystyle y(t)=\cos \left\{2\pi [f_{c}+\mathrm {B} \cos \left(2\pi f_{m}(t+\delta t)\right)] (t+\delta t)\right\}\;\cos \left\{2\pi [f_{c}+\mathrm {B} \cos \left(2\pi f_{m}t\right)]t \верно\}\,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ffb0b9f81c6bfab4e7f22d6c82c7fbfe4483cd42)

В этом уравнении можно увидеть правило полосы пропускания Карсона , и оно является точным приближением для определения величины разброса в спектре приема:


Демодуляция приемника используется с FMCW, аналогично стратегии демодуляции приемника, используемой со сжатием импульсов. Это происходит до обработки доплеровского обнаружения CFAR . Большой индекс модуляции необходим по практическим соображениям.
Практические системы вводят обратную ЧМ в принимаемый сигнал с помощью цифровой обработки сигнала до того, как быстрого преобразования Фурье для получения спектра будет использоваться процесс . Это повторяется с несколькими различными значениями демодуляции. Диапазон определяется путем определения спектра приема, ширина которого минимальна.
Практические системы также обрабатывают полученные выборки в течение нескольких циклов FM, чтобы уменьшить влияние артефактов выборки.
Конфигурации
[ редактировать ]
В радаре непрерывного действия используются две различные конфигурации антенн: моностатический радар и бистатический радар .
Моностатический
[ редактировать ]Приемная антенна радара расположена рядом с передающей антенной радара в моностатическом радаре .
Проходной нуль обычно требуется для устранения просачивания между передатчиком и приемником и повышения чувствительности в практических системах. Обычно это используется с радиолокационными приемниками непрерывного угла слежения (CWAT), которые совместимы с зенитно-ракетными системами.
Прерывистый непрерывный сигнал можно использовать для устранения просачивания между передающей и приемной антеннами. Система такого типа обычно берет одну выборку между каждой парой импульсов передачи, а частота выборки обычно составляет 30 кГц или более. Этот метод используется с самыми дешевыми видами радаров, например, с теми, которые используются для мониторинга дорожного движения и спорта.
Радары FM-CW могут быть построены с одной антенной с использованием циркулятора или круговой поляризации.
Бистатический
[ редактировать ]Приемная антенна радара расположена далеко от передающей антенны бистатического радара . Передатчик довольно дорогой, а приемник довольно недорогой и одноразовый.
Обычно это используется с полуактивным радиолокационным самонаведением , включая большинство зенитных ракетных систем. Передающий радар обычно располагается рядом с ракетной пусковой установкой. Приемник расположен в ракете.
Передающая антенна освещает цель почти так же, как прожектор . Передающая антенна также выдает всенаправленную выборку.
В приемнике используются две антенны – одна антенна, направленная на цель, и одна антенна, направленная на передающую антенну. Приемная антенна, направленная на передающую антенну, используется для создания сквозного нуля , что позволяет целевому приемнику надежно работать в главном луче антенны или рядом с ним.
Пара бистатического FM-CW приемника и передатчика также может иметь форму беспроводной системы снижения темпа (OTAD). Передатчик OTAD передает сигнал FM-CW на двух разных частотных каналах; один для синхронизации приемника с передатчиком, другой для освещения места измерения. Используя направленные антенны, приемник OTAD одновременно собирает оба сигнала и смешивает сигнал синхронизации с преобразованным с понижением частоты эхо-сигналом от места измерения в процессе, известном как уменьшение усиления по эфиру. Частота демпфированного сигнала пропорциональна бистатической дальности до цели за вычетом базового расстояния между передатчиком OTAD и приемником OTAD. [8]
В большинстве современных систем радаров FM-CW используется одна передающая антенна и несколько приемных антенн. Поскольку передатчик постоянно работает на той же частоте, что и приемник, необходимо проявлять особую осторожность, чтобы избежать перегрузки каскадов приемника.
Монопульс
[ редактировать ]Моноимпульсные антенны производят угловые измерения без импульсов или другой модуляции. Этот метод используется в полуактивном радиолокационном самонаведении .
Утечка
[ редактировать ]В практических системах передаваемый сигнал будет просачиваться в приемник. Значительная утечка будет происходить из-за отражений от окружающей среды, даже если компоненты антенны идеальны. Для достижения приемлемых характеристик требуется подавление утечки до 120 дБ.
Для создания практической системы, которая будет правильно функционировать, можно использовать три подхода.
- Нулевой
- Фильтр
- Прерывание
Подходы с нулевым лепестком и фильтром должны использоваться с бистатическим радаром, например, с полуактивным радиолокационным самонаведением , по практическим причинам, поскольку боковые лепестки радара освещения будут освещать окружающую среду в дополнение к освещению основного лепестка цели. Аналогичные ограничения применимы и к наземным радарам непрерывного действия. Это увеличивает стоимость.
Прерывание применяется к дешевым ручным моностатическим радиолокационным системам (полицейским радарам и спортивным товарам). Это непрактично для бистатических систем из-за стоимости и сложности, связанных с согласованием времени с наносекундной точностью в двух разных местах.
Конструктивным ограничением, обуславливающим это требование, является ограничение динамического диапазона практических компонентов приемника, включающих полосовые фильтры, для стабилизации которых требуется время.
Нулевой
[ редактировать ]Нулевой подход принимает два сигнала:
- Образец передаваемого сигнала, попадающего в приемник
- Образец фактического передаваемого сигнала
Фактически передаваемый сигнал поворачивается на 180 градусов, ослабляется и подается в приемник. Фазовый сдвиг и затухание устанавливаются с использованием обратной связи, полученной от приемника, для устранения большей части утечки. Типичное улучшение составляет порядка 30–70 дБ.
Фильтр
[ редактировать ]Подход к фильтру основан на использовании очень узкополосного режекторного фильтра, который устраняет низкоскоростные сигналы от близлежащих отражателей. Зона отклонения ленты составляет от 10 до 100 миль в час в зависимости от предполагаемых условий. Типичное улучшение составляет порядка 30–70 дБ.
Прерывание, FMICW
[ редактировать ]Хотя системы с прерывистой несущей не считаются системами CW, рабочие характеристики достаточно аналогичны системам группового CW с прерыванием и чисто CW-радаром, поскольку частота импульсов достаточно высока, поэтому измерения дальности не могут быть выполнены без частотной модуляции (ЧМ).
Этот метод выключает передатчик на некоторое время, прежде чем начнется выборка приемника. Помехи приемника уменьшаются примерно на 8,7 дБ за постоянную времени. Уменьшение утечки на 120 дБ требует восстановления 14 постоянных времени полосы пропускания между выключением передатчика и началом выборки приемника.
Концепция прерывания широко используется, особенно в радарах дальнего действия, где чувствительность приемника очень важна. Он широко известен как «частотно-модулированная прерывистая непрерывная волна» или FMICW.
Преимущества
[ редактировать ]Из-за простоты радары непрерывного действия недороги в производстве, относительно безотказны, дешевы в обслуживании и полностью автоматизированы. Некоторые из них настолько малы, что их можно носить в кармане. Более сложные радиолокационные системы непрерывного действия могут надежно обеспечивать точное обнаружение на расстоянии, превышающем 100 км, обеспечивая при этом подсветку ракет.
Линейное изменение FMCW может быть сжато, обеспечивая дополнительное усиление сигнала по отношению к шуму, поэтому не требуется дополнительная мощность, которая нужна импульсному радару, не использующему FM-модуляцию. Это в сочетании с тем фактом, что он является когерентным, означает, что можно использовать интеграцию Фурье вместо интеграции по азимуту, обеспечивая превосходное соотношение сигнал-шум и доплеровское измерение.
Доплеровская обработка позволяет интегрировать сигналы между последовательными выборками приемника. Это означает, что количество выборок можно увеличить, чтобы расширить диапазон обнаружения без увеличения мощности передачи. Эта технология может быть использована для создания недорогого малозаметного радара малой мощности.
характеристики CW аналогичны характеристикам импульсно-доплеровского радара По этой причине .
Ограничения
[ редактировать ]Немодулированный радар непрерывного действия не может измерять расстояние. Амплитуда сигнала обеспечивает единственный способ определить, какой объект соответствует какому измерению скорости, когда рядом с приемником находится более одного движущегося объекта, но информация об амплитуде бесполезна без измерения дальности для оценки размера цели. К движущимся объектам относятся птицы, летающие рядом с объектами перед антенной. Отражения от небольших объектов, находящихся непосредственно перед приемником, могут быть подавлены отражениями, попадающими в боковые лепестки антенны от крупных объектов, расположенных сбоку, над или позади радара, например, от деревьев, листья которых развеваются ветром, высокой травы, морской поверхности. , грузовые поезда, автобусы, грузовики и самолеты.
Небольшие радиолокационные системы, в которых отсутствует модуляция дальности, надежны только при использовании с одним объектом в стерильной среде, свободной от растительности, самолетов, птиц, погодных явлений и других близлежащих транспортных средств.
При боковых лепестках антенны мощностью 20 дБ грузовик или дерево с отражающей поверхностью площадью 1000 квадратных футов за антенной может генерировать сигнал такой же силы, как автомобиль с площадью отражения 10 квадратных футов перед небольшой ручной антенной. Обследование территории необходимо, чтобы определить, будут ли портативные устройства работать надежно, поскольку ненаблюдаемое дорожное движение и деревья позади оператора могут мешать наблюдениям, сделанным перед оператором.
Это типичная проблема с радарными скоростными пушками , используемыми сотрудниками правоохранительных органов, на мероприятиях NASCAR и в таких видах спорта, как бейсбол, гольф и теннис. Помехи от второго радара, зажигание автомобиля, другие движущиеся объекты, движущиеся лопасти вентилятора на намеченной цели и другие источники радиочастот искажают измерения. Эти системы ограничены длиной волны, которая составляет 0,02 метра в Ku-диапазоне , поэтому разброс луча превышает 45 градусов, если антенна меньше 12 дюймов (0,3 метра). Значительные боковые лепестки антенны простираются во всех направлениях, если антенна не превышает размер транспортного средства, на котором установлен радар. [9]
подавление боковых лепестков Для надежной работы необходимы и модуляция FM-диапазона. Невозможно узнать направление поступающего сигнала без подавления боковых лепестков, для чего требуются две или более антенны, каждая со своим индивидуальным приемником. Невозможно узнать расстояние без модуляции FM-диапазона.
Скорость, направление и расстояние необходимы для выделения отдельного объекта.
Эти ограничения обусловлены хорошо известными ограничениями базовой физики, которые невозможно преодолеть с помощью дизайна.
См. также
[ редактировать ]- Доплеровский радар - Тип радиолокационного оборудования.
- Импульсно-доплеровский радар - Тип радиолокационной системы
Библиография
[ редактировать ]- Лак, Дэвид Г.К. Радар с частотной модуляцией , опубликовано McGraw-Hill, Нью-Йорк , 1949 г., 466 страниц.
- Стимсон, Джордж В. Введение в бортовой радар , 2-е изд., SciTech Publishing, 584 страницы.
- Джесси Чжэн (2005). Оптическая частотно-модулированная непрерывная интерферометрия (FMCW) . Спрингер. ISBN 978-0387230092 .
Ссылки
[ редактировать ]- ^ «Радар непрерывного действия» . Федерация американских ученых.
- ^ Шривастав, А.; Нгуен, П.; МакКоннелл, М.; Лопаро, КН; Мандал, С. (октябрь 2020 г.). «Высокоцифровая многоантенная георадиолокационная система» . Транзакции IEEE по приборостроению и измерениям . 69 : 7422–7436. дои : 10.1109/TIM.2020.2984415 . S2CID 216338273 .
- ^ «Радар непрерывного действия» . Радартуториал.eu.
- ^ Дитчберн, Р.В. (1991) [1961]. Свет . Dover Publications Inc., стр. 331–333. ISBN 0-486-66667-0 .
- ^ Джеймс М. Риденур (1947). Разработка радиолокационных систем . Серия «Радиационная лаборатория Массачусетского технологического института». Том. 1. п. 629.
- ^ Джим Лесурф. «Улучшенные формы радиолокации» . дата доступа = 24 января 2014 г.
- ^ Jump up to: а б «Частотно-модулированный радар непрерывного действия» . Радартуториал . Проверено 7 августа 2012 г.
- ^ М. Эш и др. , Новая архитектура мультистатического FMCW-радара с помощью беспроводного демпинга, Журнал IEEE Sensors , № 99, 2015.
- ^ «Рейнджер ЭЗ» . МПХ Индастриз. Архивировано из оригинала 19 сентября 2011 года . Проверено 7 сентября 2011 г.
Внешние ссылки
[ редактировать ]| Базы данных органов управления : Национальные |
|---|