Импульсно-доплеровский радар

Импульсно -доплеровский радар — это радиолокационная система, которая определяет дальность до цели с помощью методов синхронизации импульсов и использует эффект Доплера возвращенного сигнала для определения скорости целевого объекта. Он сочетает в себе особенности импульсных радаров и радаров непрерывного действия , которые раньше были отдельными из-за сложности электроники .
Первый действующий импульсно-доплеровский радар был в CIM-10 Bomarc , американской сверхзвуковой ракете большой дальности с прямоточными воздушно-реактивными двигателями, которая была вооружена ядерным оружием W40 для уничтожения целых группировок атакующих самолетов противника. [ 1 ] Импульсно-доплеровские системы впервые начали широко использоваться на истребителях, начиная с 1960-х годов. Ранее радары использовали синхронизацию импульсов для определения дальности и угла антенны (или аналогичных средств) для определения пеленга. Однако это работало только тогда, когда антенна радара не была направлена вниз; в этом случае отражение от земли подавляло любые отражения от других объектов. Поскольку земля движется с той же скоростью, но в противоположном направлении от самолета, методы Доплера позволяют отфильтровывать отраженный сигнал от земли, обнаруживая самолеты и транспортные средства. Это дает импульсно-доплеровским радарам возможность « смотреть/сбивать ». Вторичным преимуществом военного радара является снижение передаваемой мощности при достижении приемлемых характеристик для повышения безопасности малозаметного радара. [ 2 ]
Импульсно-доплеровские методы также находят широкое применение в метеорологических радарах , позволяя радару определять скорость ветра по скорости любых осадков в воздухе. Импульсно-доплеровский радар также является основой радаров с синтезированной апертурой, используемых в радиолокационной астрономии , дистанционном зондировании и картографировании. В управлении воздушным движением они используются для отделения самолетов от помех. Помимо вышеупомянутых обычных приложений для наблюдения, импульсно-доплеровский радар успешно применяется в здравоохранении, например, для оценки риска падения и обнаружения падения, для медсестер или в клинических целях. [ 3 ]
История
[ редактировать ]Самые ранние радиолокационные системы не работали должным образом. Причина была связана с эффектами Доплера, которые ухудшают производительность систем, не предназначенных для учета движущихся объектов. Быстро движущиеся объекты вызывают сдвиг фазы передаваемого импульса, что может привести к подавлению сигнала. Максимально вредное воздействие допплер оказывает на системы индикаторов движущихся целей , которые должны использовать обратный фазовый сдвиг для доплеровской компенсации в детекторе.
Также было обнаружено, что доплеровские погодные эффекты (осадки) ухудшают работу обычного радара и радара-индикатора движущейся цели, которые могут маскировать отражения самолетов. Это явление было адаптировано для использования с метеорологическими радарами в 1950-х годах после рассекречивания некоторых систем времен Второй мировой войны.
Импульсно-доплеровский радар был разработан во время Второй мировой войны для преодоления ограничений за счет увеличения частоты повторения импульсов . Это потребовало разработки клистрона , лампы бегущей волны и твердотельных приборов. Ранние импульсные допплеры были несовместимы с другими мощными устройствами усиления микроволнового излучения, которые не являются когерентными , но были разработаны более сложные методы, которые записывают фазу каждого передаваемого импульса для сравнения с отраженными эхо-сигналами.
Ранние примеры военных систем включают AN/SPG-51 B, разработанный в 1950-х годах специально для работы в ураганных условиях без ухудшения характеристик.
Система управления огнем Hughes AN/ASG-18 представляла собой прототип бортовой радиолокационной/комбинированной системы для планируемого самолета-перехватчика North American XF-108 Rapier для ВВС США, а затем для Lockheed YF-12 . Первый в США импульсно-доплеровский радар. [ 4 ] система имела возможность обзора и сбивания и могла отслеживать одну цель за раз.
Использование импульсно-доплеровского радара на самолетах стало возможным после включения в конструкцию цифровых компьютеров. К середине 1970-х годов импульсно-допплеровский режим обеспечил возможность обзора и сбивания для поддержки ракетных систем класса «воздух-воздух» на большинстве современных военных самолетов.
Принцип
[ редактировать ]
Измерение дальности
[ редактировать ]
Импульсно-доплеровские системы измеряют расстояние до объектов, измеряя время, прошедшее между отправкой импульса радиоэнергии и получением отражения объекта. Радиоволны распространяются со скоростью света , поэтому расстояние до объекта — это затраченное время, умноженное на скорость света, разделенное на два — туда и обратно.
Измерение скорости
[ редактировать ]
Импульсно-доплеровский радар основан на эффекте Доплера , при котором перемещение по дальности приводит к сдвигу частоты сигнала, отраженного от цели.

Радиальная скорость важна для работы импульсно-доплеровского радара. Когда отражатель перемещается между каждым передаваемым импульсом, возвращаемый сигнал имеет разность фаз или фазовый сдвиг от импульса к импульсу. Это заставляет отражатель создавать доплеровскую модуляцию отраженного сигнала.
Импульсно-доплеровские радары используют это явление для улучшения характеристик.
Амплитуда последовательно возвращающегося импульса из одного и того же сканируемого объема равна где

- расстояние радара до цели,
- длина волны радара,
- это время между двумя импульсами.



Так

Это позволяет радару разделять отражения от нескольких объектов, расположенных в одном объеме пространства, разделяя объекты с использованием расширенного спектра для разделения различных сигналов: где - фазовый сдвиг, вызванный движением по дальности.


Преимущества
[ редактировать ]Скорость отклонения выбирается в импульсно-доплеровских системах обнаружения самолетов, поэтому ничего ниже этой скорости не будет обнаружено. Луч антенны в один градус освещает миллионы квадратных футов местности на расстоянии 10 миль (16 км), и это дает тысячи обнаружений на горизонте или ниже, если не используется доплеровский режим.
Импульсно-доплеровский радар использует следующие критерии обработки сигналов для исключения нежелательных сигналов от медленно движущихся объектов. Это также известно как отказ от беспорядка. [ 5 ] Скорость отклонения обычно устанавливается чуть выше преобладающей скорости ветра (от 10 до 100 миль в час или от 20 до 160 км/ч). Порог скорости для метеорологического радара намного ниже . [ 6 ]

В бортовом импульсно-доплеровском радаре порог скорости компенсируется скоростью самолета относительно земли. где – это угловое смещение между положением антенны и траекторией полета самолета.


Отражения от поверхности появляются почти во всех радарах. Наземные помехи обычно появляются в круговой области в радиусе около 25 миль (40 км) вблизи наземного радара. Это расстояние простирается гораздо дальше в бортовых и космических радиолокаторах. Помехи возникают в результате отражения радиоэнергии от поверхности земли, зданий и растительности. К помехам относятся погодные условия на радарах, предназначенных для обнаружения самолетов и космических кораблей и составления отчетов. [ 7 ]
Помехи создают область уязвимости в радаре во временной области с амплитудой импульса . Недоплеровские радиолокационные системы не могут быть направлены прямо на землю из-за чрезмерного количества ложных тревог, которые перегружают компьютеры и операторов. Чувствительность необходимо снизить вблизи помех, чтобы избежать перегрузки. Эта уязвимость начинается в низинной области на высоте нескольких лучей над горизонтом и распространяется вниз. Это также существует во всем объеме движущегося воздуха, связанного с погодными явлениями.
Импульсно-доплеровский радар исправляет это следующим образом.
- Позволяет направить антенну радара прямо на землю, не перегружая компьютер и не снижая чувствительности.
- Заполняет область уязвимости, связанную с радаром во временной области с амплитудой импульса для обнаружения небольших объектов вблизи местности и погодных условий.
- Увеличивает дальность обнаружения на 300% и более по сравнению с индикацией движущихся целей (MTI) за счет улучшения видимости в условиях помех. [ 8 ]
способность подавления помех на уровне необходима Для возможности наблюдения/сбития около 60 дБ , и импульсно-допплеровский метод является единственной стратегией, которая может удовлетворить этому требованию. Это устраняет уязвимости, связанные с низинной и загоризонтной средой.
Сжатие импульсов и индикатор движущейся цели (MTI) обеспечивают видимость субпомех до 25 дБ. Луч антенны MTI направлен над горизонтом, чтобы избежать чрезмерного количества ложных тревог, что делает системы уязвимыми. Самолеты и некоторые ракеты используют эту слабость, используя технику, называемую полетом ниже радара, чтобы избежать обнаружения ( «ворс земли »). Этот метод полета неэффективен против импульсно-доплеровского радара.
Импульсно-допплеровский метод дает преимущество при попытке обнаружить ракеты и самолеты с низкой заметностью, летающие вблизи местности, морской поверхности и погодных условий.
Звуковой допплер и размер цели поддерживают пассивную классификацию типа транспортного средства, когда идентификация «свой» или «чужой» невозможна из сигнала транспондера . Отраженные микроволновые сигналы средней частоты повторения импульсов (PRF) составляют от 1500 до 15 000 циклов в секунду, что слышно. Это означает, что вертолет звучит как вертолет, реактивный самолет звучит как реактивный самолет, а винтовой самолет звучит как пропеллер. Самолеты без движущихся частей издают звук. Фактический размер цели можно рассчитать с помощью звукового сигнала. [ 9 ]
Вреды
[ редактировать ]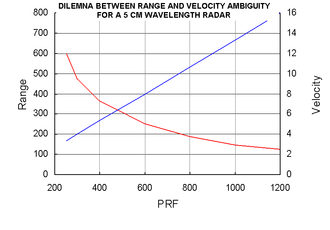
Обработка неоднозначности требуется, когда целевой диапазон находится выше красной линии на графике, что увеличивает время сканирования.
Время сканирования является критическим фактором для некоторых систем, поскольку транспортные средства, движущиеся со скоростью звука или выше, могут преодолевать одну милю (1,6 км) каждые несколько секунд, например, « Экзосет» , «Гарпун» , «Кухня » и ракеты «воздух-воздух» . Максимальное время сканирования всего объема неба должно составлять порядка дюжины секунд или меньше для систем, работающих в этой среде.
Импульсно-доплеровский радар сам по себе может быть слишком медленным, чтобы охватить весь объем пространства над горизонтом, если не используется веерный луч. Этот подход используется с радаром воздушного наблюдения очень дальнего действия AN/SPS 49(V)5, который жертвует измерением высоты ради увеличения скорости. [ 10 ]
Движение импульсно-доплеровской антенны должно быть достаточно медленным, чтобы все обратные сигналы как минимум от 3 различных PRF могли быть обработаны до максимальной ожидаемой дальности обнаружения. Это известно как время пребывания . [ 11 ] Движение антенны для импульсного допплера должно быть таким же медленным, как и движение радара с использованием MTI .
Поисковый радар, включающий импульсно-допплеровский режим, обычно является двухрежимным, поскольку наилучшие общие характеристики достигаются, когда импульсно-доплеровский режим используется для зон с высокой частотой ложных тревог (горизонт или ниже и погода), в то время как обычный радар будет сканировать быстрее в свободном пространстве, где ложные тревоги Частота тревог низкая (над горизонтом, ясное небо).
Тип антенны является важным фактором для многорежимного радара, поскольку нежелательный фазовый сдвиг, вносимый антенной радара, может ухудшить качество измерений видимости в условиях субпомех.
Обработка сигналов
[ редактировать ]Усовершенствование обработки сигнала импульсным доплеровским режимом позволяет обнаруживать небольшие высокоскоростные объекты в непосредственной близости от больших медленно движущихся отражателей. Для достижения этого передатчик должен быть когерентным и производить низкий фазовый шум в течение интервала обнаружения, а приемник должен иметь большой мгновенный динамический диапазон .
Импульсно-доплеровская обработка сигналов также включает разрешение неоднозначности для определения истинной дальности и скорости.
Полученные сигналы от нескольких PRF сравниваются для определения истинного диапазона с использованием процесса разрешения неоднозначности диапазона .
Полученные сигналы также сравниваются с использованием процесса разрешения частотной неоднозначности .
Разрешение диапазона
[ редактировать ]Разрешение по дальности — это минимальное расстояние между двумя объектами, движущимися с одинаковой скоростью, прежде чем радар сможет обнаружить два дискретных отражения:

В дополнение к этому пределу выборки длительность передаваемого импульса может означать, что сигналы от двух целей будут получены одновременно из разных частей импульса.
Разрешение скорости
[ редактировать ]Разрешение по скорости — это минимальная разница радиальных скоростей между двумя объектами, движущимися на одном и том же расстоянии, прежде чем радар сможет обнаружить два дискретных отражения:

Особое внимание
[ редактировать ]К импульсно-доплеровскому радару предъявляются особые требования, которым необходимо удовлетворять для достижения приемлемых характеристик.
Частота повторения импульсов
[ редактировать ]Импульсно-допплеровский метод обычно использует среднюю частоту повторения импульсов (PRF) примерно от 3 до 30 кГц. Расстояние между импульсами передачи составляет от 5 км до 50 км.
Дальность и скорость невозможно измерить напрямую с использованием средней ЧПИ, а для определения истинной дальности и скорости требуется разрешение неоднозначности. Доплеровские сигналы обычно имеют частоту выше 1 кГц, что является слышимым, поэтому аудиосигналы от систем со средней ЧПИ можно использовать для пассивной классификации целей.
Угловое измерение
[ редактировать ]Радарные системы требуют угловых измерений. Транспондеры обычно не связаны с импульсно-доплеровским радаром, поэтому для практической работы требуется подавление боковых лепестков. [ 12 ] [ 13 ]
Радарные системы слежения используют угловую ошибку для повышения точности за счет проведения измерений перпендикулярно лучу антенны радара. Угловые измерения усредняются за определенный промежуток времени и объединяются с радиальным движением для получения информации, подходящей для прогнозирования положения цели на короткое время в будущем.
В радарах слежения используются два метода угловых ошибок: моноимпульсное и коническое сканирование .
Последовательность
[ редактировать ]Импульсно-доплеровский радар требует когерентного генератора с очень небольшим шумом. Фазовый шум ухудшает видимость субпомех, создавая видимое движение неподвижных объектов.
Резонаторный магнетрон и усилитель со скрещенным полем не подходят, поскольку шум, вносимый этими устройствами, влияет на эффективность обнаружения. Единственными усилительными устройствами, подходящими для импульсной допплерографии, являются клистроны , лампы бегущей волны и полупроводниковые устройства.
зубчатый
[ редактировать ]Обработка импульсно-доплеровского сигнала приводит к явлению, называемому гребешком. Название связано с серией дыр, которые возникают в процессе обнаружения.
Гребешок для импульсно-доплеровского радара включает в себя слепые скорости, создаваемые фильтром подавления помех. Каждый объем пространства должен быть просканирован с использованием 3 или более различных PRF. Схема обнаружения с двумя PRF будет иметь промежутки обнаружения с набором дискретных диапазонов, каждый из которых имеет слепую скорость.
Окно
[ редактировать ]Звонкие артефакты создают проблемы при поиске, обнаружении и разрешении неоднозначности в импульсно-доплеровском радаре.
Звон снижается двумя способами.
Во-первых, форма передаваемого импульса регулируется для сглаживания переднего и заднего фронта, чтобы радиочастотная мощность увеличивалась и уменьшалась без резких изменений. Это создает импульс передачи с гладкими концами вместо прямоугольной волны, что уменьшает явление звона, которое в противном случае связано с отражением цели.
Во-вторых, форма принимаемого импульса регулируется с помощью функции окна , которая минимизирует звон, возникающий каждый раз, когда импульсы подаются на фильтр. В цифровой системе это регулирует фазу и/или амплитуду каждой выборки перед ее применением к быстрому преобразованию Фурье . Окно Дольфа-Чебышева является наиболее эффективным, поскольку оно создает ровную технологическую поверхность без звона, который в противном случае мог бы вызвать ложные срабатывания сигнализации. [ 14 ]
Антенна
[ редактировать ]Импульсно-доплеровский радар обычно ограничивается антеннами с механическим наведением и активными фазированными решетками.
Механические радиочастотные компоненты, такие как волновод, могут создавать доплеровскую модуляцию из-за фазового сдвига, вызванного вибрацией. Это накладывает требование о проведении полного спектра эксплуатационных испытаний с использованием вибростендов, которые могут создавать мощную механическую вибрацию на всех ожидаемых звуковых частотах.
Доплеровский режим несовместим с большинством фазированных антенн с электронным управлением. Это связано с тем, что элементы фазовращателя в антенне невзаимны, и фазовый сдвиг необходимо регулировать до и после каждого передаваемого импульса. Ложный фазовый сдвиг создается внезапным импульсом фазового сдвига, и стабилизация в течение периода приема между импульсами передачи приводит к тому, что доплеровская модуляция превращается в стационарные помехи. Такая модуляция приема искажает показатель эффективности видимости субпомех. Требуется время установления фазовращателя порядка 50 нс. Начало выборки приемника должно быть отложено как минимум на одну постоянную времени установления фазовращателя (или более) на каждые 20 дБ видимости субпомех.
Большинство антенных фазовращателей, работающих с ЧПИ выше 1 кГц, вносят паразитный фазовый сдвиг, если не приняты специальные меры, такие как сокращение времени установления фазовращателя до нескольких десятков наносекунд. [ 15 ]
Ниже указано максимально допустимое время стабилизации для модулей фазового сдвига антенны . где

- T = время установления фазовращателя,
- SCV = видимость субпомех в дБ ,
- S = количество выборок диапазона между каждым импульсом передачи,
- PRF = максимальная расчетная частота повторения импульсов.
Тип антенны и характеристики сканирования являются практическими соображениями для многорежимных радиолокационных систем.
Дифракция
[ редактировать ]Неровные поверхности, такие как волны и деревья, образуют дифракционную решетку, подходящую для отклонения микроволновых сигналов. Импульсный допплер может быть настолько чувствительным, что дифракцию от гор, зданий или вершин волн можно использовать для обнаружения быстро движущихся объектов, в противном случае заблокированных твердым препятствием на луче зрения. Это явление с очень большими потерями, которое становится возможным только тогда, когда радар имеет значительную избыточную видимость под помехами.
При рефракции и воздуховодах используется частота передачи в L-диапазоне или ниже для расширения горизонта, что сильно отличается от дифракции. Рефракция загоризонтного радара использует переменную плотность в столбе воздуха над поверхностью земли для отклонения радиочастотных сигналов. Инверсионный слой может создать переходный тропосферный канал , который улавливает радиочастотные сигналы в тонком слое воздуха, подобно волноводу.
Видимость подзагромождений
[ редактировать ]Видимость субпомех предполагает максимальное соотношение мощности помех к целевой мощности, которое пропорционально динамическому диапазону. Это определяет производительность в плохую погоду и вблизи поверхности земли.

Видимость субпомех — это соотношение наименьшего сигнала, который можно обнаружить, к присутствию более сильного сигнала.

Небольшое отражение быстро движущейся цели можно обнаружить при наличии более крупных отражений от медленно движущихся помех, если выполняется следующее:

Производительность
[ редактировать ]Уравнение импульсно-доплеровского радара можно использовать для понимания компромиссов между различными конструктивными ограничениями, такими как энергопотребление, дальность обнаружения и угрозы безопасности в микроволновом диапазоне. Это очень простая форма моделирования, позволяющая оценить эффективность в стерильной среде.
Теоретический диапазон производительности следующий.

где
- R = расстояние до цели,
- P t = мощность передатчика,
- G t = усиление передающей антенны,
- A r = эффективная апертура (площадь) приемной антенны,
- σ = радиолокационное сечение или коэффициент рассеяния цели,
- F = коэффициент распространения диаграммы направленности антенны ,
- D = размер доплеровского фильтра (передача импульсов в каждом быстром преобразовании Фурье ),
- k B = постоянная Больцмана ,
- Т = абсолютная температура,
- B = полоса пропускания приемника (полосовой фильтр) ,
- N = коэффициент шума .
Это уравнение получается путем объединения уравнения радиолокации с уравнением шума и учета внутриполосного распределения шума по нескольким фильтрам обнаружения. Значение D добавляется к стандартному уравнению дальности действия радара, чтобы учесть как обработку импульсно-доплеровского сигнала, так и снижение ЧМ-шума передатчика .
Дальность обнаружения увеличивается пропорционально корню четвёртой степени из количества фильтров при заданной потребляемой мощности. Альтернативно, энергопотребление снижается за счет количества фильтров для заданного диапазона обнаружения.
Импульсно-доплеровская обработка сигналов объединяет всю энергию всех отдельных отраженных импульсов, поступающих в фильтр. Это означает, что система обработки импульсно-доплеровского сигнала с 1024 элементами обеспечивает улучшение на 30,103 дБ благодаря типу обработки сигнала, который должен использоваться с импульсно-доплеровским радаром. Энергия всех отдельных импульсов объекта суммируется в процессе фильтрации.
Обработка сигнала 1024-точечным фильтром повышает производительность на 30,103 дБ при условии совместимости передатчика и антенны. Это соответствует увеличению максимального расстояния на 562%.
Эти улучшения являются причиной того, что импульсная допплерография необходима для военной и астрономической науки.
Использование отслеживания самолетов
[ редактировать ]Импульсно-доплеровский радар обнаружения самолетов имеет два режима.
- Сканировать
- Отслеживать
Режим сканирования включает частотную фильтрацию, определение порога амплитуды и разрешение неоднозначности. Как только отражение обнаружено и устранено , импульсно-доплеровский радар автоматически переходит в режим отслеживания объема пространства, окружающего трассу.
Режим отслеживания работает как система фазовой автоподстройки частоты , где доплеровская скорость сравнивается с перемещением по дальности при последовательных сканированиях. Лок указывает, что разница между двумя измерениями ниже порога, который может возникнуть только с объектом, удовлетворяющим механике Ньютона . Другие типы электронных сигналов не могут произвести блокировку. Блокировка отсутствует ни в одном другом типе радаров.
Критерий блокировки должен соблюдаться во время нормальной работы. [ 16 ]
Блокировка исключает необходимость вмешательства человека, за исключением вертолетов и электронных помех .
Погодные явления подчиняются адиабатическому процессу, связанному с воздушной массой , а не ньютоновской механикой , поэтому критерий блокировки обычно не используется для метеорологического радара.
Импульсно-доплеровская обработка сигнала выборочно исключает низкоскоростные отражения, поэтому не происходит никаких обнаружений при скорости ниже пороговой. Это исключает влияние рельефа, погоды, биологических и механических помех, за исключением самолетов-ловушек.
Целевой доплеровский сигнал от обнаружения преобразуется из частотной области обратно в звук во временной области для оператора в режиме отслеживания в некоторых радиолокационных системах. Оператор использует этот звук для пассивной классификации целей, например, для распознавания вертолетов и радиоэлектронных помех.
Вертолеты
[ редактировать ]Особого внимания требуют самолеты с большими движущимися частями, поскольку импульсно-доплеровский радар работает как система фазовой автоподстройки частоты . Кончики лопастей, движущиеся со скоростью, близкой к скорости звука, производят единственный сигнал, который можно обнаружить, когда вертолет медленно движется вблизи местности и погодных условий.
Вертолет выглядит как быстро пульсирующий источник шума, за исключением ясного и свободного от помех окружения. Для пассивного определения типа воздушного объекта подается звуковой сигнал. Микроволновой доплеровский сдвиг частоты, вызванный движением отражателя, попадает в слышимый для человека звуковой диапазон ( 20–20 000 Гц ), который используется для классификации целей в дополнение к видам обычных радиолокационных дисплеев, используемых для этой цели, таких как А-скоп, Индикатор B-scope, C-scope и RHI. Человеческое ухо может заметить разницу лучше, чем электронное оборудование.
Требуется специальный режим, поскольку информация обратной связи по доплеровской скорости должна быть не связана с радиальным движением, чтобы система могла переходить от сканирования к отслеживанию без блокировки.
Аналогичные методы необходимы для получения информации о дорожках для сигналов помех и помех, которые не могут удовлетворять критерию блокировки.
Многомодовый
[ редактировать ]Импульсно-доплеровский радар должен быть многорежимным для управления разворотом и пересечением траектории самолета.
В режиме отслеживания импульсно-доплеровский радар должен иметь возможность изменять доплеровскую фильтрацию для объема пространства, окружающего путь, когда радиальная скорость падает ниже минимальной скорости обнаружения. Регулировка доплеровского фильтра должна быть связана с функцией радиолокационного слежения для автоматической регулировки скорости доплеровского отклонения в объеме пространства, окружающего трассу.
Без этой функции слежение прекратится, поскольку в противном случае сигнал цели будет отклонен доплеровским фильтром, когда радиальная скорость приближается к нулю, поскольку не происходит изменения частоты.
Многорежимная работа может также включать непрерывное освещение для полуактивного радиолокационного самонаведения .
См. также
[ редактировать ]- Характеристики радиолокационного сигнала (основы радиолокационного сигнала)
- Доплеровский радар (неимпульсный; используется в навигационных системах)
- Метеорологический радар (импульсный с доплеровской обработкой)
- Непрерывный радар (неимпульсный, чистая доплеровская обработка)
- FM-CW радар (неимпульсный, с качающейся частотой, дальностью и доплеровской обработкой)
- Алиасинг — причина неоднозначных оценок скорости
- Допплерография – измерения скорости в медицинском ультразвуке. По тому же принципу
Внешние ссылки
[ редактировать ]- Презентация доплеровского радара , в которой подчеркиваются преимущества использования метода автокорреляции.
- Раздаточные материалы по импульсно-доплеровскому радару из курса «Введение в принципы и применение радаров» в Университете Айовы
- Современные радиолокационные системы Хэмиша Мейкла ( ISBN 1-58053-294-2 )
- «Передовые радиолокационные методы и системы» под редакцией Гаспаре Галати ( ISBN 0-86341-172-X )
Ссылки
[ редактировать ]- ^ Аэродинамика тактической ракеты, Том 141. С17. Майкл Дж. Хемш, Американский институт аэронавтики и астронавтики. Американский институт аэронавтики и астронавтики, 1992 г.
- ^ «Многорежимная РЛС AN/APQ-174/186» . Рэйтеон .
- ^ Лян, Лю; Попеску, Михаил; Скубич, Марджори; Ранц, Мэрилин; Ярдиби, Тарик; Каддихи, Пол (2011). «Автоматическое обнаружение падения на основе сигнатуры движения доплеровского радара» . Материалы 5-й Международной конференции ICST по универсальным вычислительным технологиям в здравоохранении . IEEE PervasiveHealth. doi : 10.4108/icst.pervasivehealth.2011.245993 . ISBN 978-1-936968-15-2 . S2CID 14786782 .
- ^ Пейс 1991, с. 152.
- ^ «Подавление помех (импульсный допплер), разработка радиолокационных систем» . Секция IEEE Нью-Гэмпшира, Университет Нью-Гэмпшира. Архивировано из оригинала 31 марта 2012 г. Проверено 4 сентября 2011 г.
- ^ «Путь к Nexrad, разработка доплеровского радара в Национальной лаборатории сильных штормов» (PDF) . Национальное управление океанических и атмосферных исследований, Национальная лаборатория сильных штормов. Архивировано из оригинала (PDF) 21 марта 2012 г. Проверено 4 сентября 2011 г.
- ^ «Как работает доплеровский радар?» . Метеорологический маяк, доплеровский радар. Архивировано из оригинала 31 марта 2012 г. Проверено 4 сентября 2011 г.
- ^ «Видимость и улучшение видимости субзагромождений» . Архивировано из оригинала 1 января 2011 года . Проверено 29 января 2011 г.
- ^ «Powerofpulse.com — Североамериканский сайт по экономике и здравоохранению» . Проверено 15 марта 2024 г.
- ^ «РЛС воздушного наблюдения очень дальнего действия AN/SPS-49» . Федерация американских ученых .
- ^ «Время задержки и число попаданий за сканирование» . Радартуториал.
- ^ «Подавление боковых лепестков» . Radartutorial.eu.
- ^ «Подавление боковых лепестков» . Массачусетский технологический институт . Архивировано из оригинала 31 марта 2012 г. Проверено 6 сентября 2011 г.
- ^ «Окно Дольфа-Чебышева» . Стэнфордский университет . Проверено 29 января 2011 г.
- ^ «Быстрый фазовращатель высокой мощности L-диапазона» (PDF) . Проверено 2 августа 2011 г.
- ^ «Радар наблюдения АВАКС» (PDF) . Норроп Граммонд. Архивировано из оригинала (PDF) 27 февраля 2009 г.
Библиография
[ редактировать ]- Пейс, Стив (1991). X-Fighters: экспериментальные и прототипные истребители ВВС США, от XP-59 до YF-23 . Сент-Пол, Миннесота: Motorbooks International. ISBN 0-87938-540-5 .