Целочисленное программирование
программа математической Задача целочисленного программирования — это оптимизации или осуществимости , в которой некоторые или все переменные ограничены целыми числами . Во многих случаях этот термин относится к целочисленному линейному программированию (ILP), в котором целевая функция и ограничения (кроме целочисленных ограничений) являются линейными .
Целочисленное программирование является NP-полным . В частности, частный случай целочисленного линейного программирования 0–1, в котором неизвестные являются двоичными и должны соблюдаться только ограничения, является одной из 21 NP-полной задачи Карпа . [1]
Если некоторые переменные решения не являются дискретными, проблема известна как задача смешанно-целочисленного программирования . [2]
Каноническая и стандартная форма ILP
[ редактировать ]В целочисленном линейном программировании каноническая форма отличается от стандартной формы . Целочисленная линейная программа в канонической форме выражается так (заметим, что это вектор, который предстоит определить): [3]


а ILP в стандартной форме выражается как

где являются векторами и является матрицей. Как и в случае с линейными программами, ILP, не имеющие стандартной формы, могут быть преобразованы в стандартную форму путем исключения неравенств и введения слабых переменных ( ) и заменяя переменные, которые не имеют ограничений по знаку, разницей двух переменных с ограничениями по знаку.



Пример
[ редактировать ]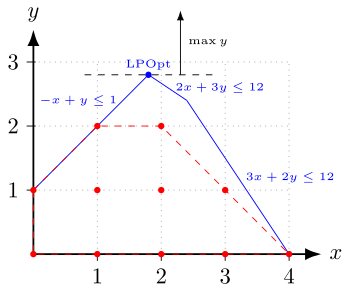
График справа показывает следующую проблему.

Возможные целочисленные точки показаны красным, а красные пунктирные линии указывают их выпуклую оболочку, которая представляет собой наименьший выпуклый многогранник, содержащий все эти точки. Синие линии вместе с осями координат определяют многогранник релаксации ЛП, который задается неравенствами без ограничения целочисленности. Цель оптимизации — переместить черную пунктирную линию как можно дальше вверх, при этом касаясь многогранника. Оптимальными решениями целочисленной задачи являются точки и что оба имеют объективное значение 2. Единственный оптимум релаксации равен с объективным значением 2,8. Если решение релаксации округляется до ближайших целых чисел, это невозможно для ILP.



Доказательство NP-твердости
[ редактировать ]Ниже приводится сведение от минимального вершинного покрытия к целочисленному программированию, которое послужит доказательством NP-трудности.
Позволять быть неориентированным графом. Определите линейную программу следующим образом:


Учитывая, что ограничения ограничивают до 0 или 1, любое допустимое решение целочисленной программы представляет собой подмножество вершин. Первое ограничение подразумевает, что хотя бы одна конечная точка каждого ребра включена в это подмножество. Следовательно, решение описывает вершинное покрытие. Кроме того, учитывая некоторое вершинное покрытие C, может быть установлено значение 1 для любого и до 0 для любого тем самым давая нам допустимое решение целочисленной программы. Таким образом, мы можем заключить, что если мы минимизируем сумму мы также нашли минимальное вершинное покрытие. [4]



Варианты
[ редактировать ]Смешанно-целочисленное линейное программирование ( MILP ) включает в себя задачи, в которых только некоторые переменные , должны быть целыми числами, в то время как другие переменные могут быть нецелыми.

Линейное программирование ноль-единица (или двоично-целочисленное программирование ) включает в себя задачи, в которых переменные ограничены значениями 0 или 1. Любая ограниченная целочисленная переменная может быть выражена как комбинация двоичных переменных . [5] Например, если задана целочисленная переменная, , переменная может быть выражена с помощью двоичные переменные:



Приложения
[ редактировать ]Есть две основные причины использования целочисленных переменных при моделировании задач в виде линейной программы:
- Целочисленные переменные представляют величины, которые могут быть только целыми. Например, невозможно построить 3,7 автомобиля.
- Целочисленные переменные представляют решения (например, включать ли ребро в граф ) и поэтому должны принимать только значения 0 или 1.
Эти соображения часто возникают на практике, поэтому целочисленное линейное программирование может использоваться во многих областях приложений, некоторые из которых кратко описаны ниже.
Планирование производства
[ редактировать ]Смешанно-целочисленное программирование имеет множество применений в промышленном производстве, включая моделирование цехов. Один важный пример имеет место в планировании сельскохозяйственного производства и включает в себя определение урожайности нескольких культур, которые могут совместно использовать ресурсы (например, землю, рабочую силу, капитал, семена, удобрения и т. д.). Возможная цель — максимизировать общий объем производства, не превышая при этом имеющиеся ресурсы. В некоторых случаях это можно выразить в терминах линейной программы, но переменные должны быть целочисленными.
Планирование
[ редактировать ]Эти проблемы связаны с планированием обслуживания и транспортных средств в транспортных сетях. Например, проблема может заключаться в распределении автобусов или метро по отдельным маршрутам для соблюдения расписания, а также в оснащении их водителями. Здесь двоичные переменные решения указывают, назначен ли автобус или метро маршруту и назначен ли водитель конкретному поезду или метро. Техника программирования ноль-единица была успешно применена для решения проблемы выбора проекта, в которой проекты являются взаимоисключающими и/или технологически взаимозависимыми. Он используется в частном случае целочисленного программирования, в котором все переменные решения являются целыми числами. Переменная может принимать только значения ноль или единица.
Территориальное разделение
[ редактировать ]Проблемы территориального разделения или округления заключаются в разделении географического региона на районы для планирования некоторых операций с учетом различных критериев или ограничений. Некоторыми требованиями для этой проблемы являются: смежность, компактность, баланс или справедливость, уважение естественных границ и социально-экономическая однородность. Некоторые варианты решения проблем такого типа включают в себя: политические округа, школьные округа, районы здравоохранения и округа по управлению отходами.
Телекоммуникационные сети
[ редактировать ]Целью этих задач является проектирование сети линий для установки так, чтобы удовлетворялся заранее определенный набор требований к связи, а общая стоимость сети была минимальной. [6] Это требует оптимизации как топологии сети, так и настройки пропускной способности различных линий. Во многих случаях пропускная способность ограничена целыми числами. Обычно существуют, в зависимости от используемой технологии, дополнительные ограничения, которые можно моделировать как линейные неравенства с целочисленными или двоичными переменными.
Сотовые сети
[ редактировать ]Задача частотного планирования в мобильных сетях GSM включает в себя распределение доступных частот по антеннам, чтобы можно было обслуживать пользователей и минимизировать помехи между антеннами. [7] Эту задачу можно сформулировать как целочисленную линейную программу, в которой двоичные переменные указывают, присвоена ли антенне частота.
Другие приложения
[ редактировать ]- Сопоставление денежных потоков
- энергетической системы Оптимизация [8] [9]
- БПЛА наведение [10] [11]
- транзитной карты Составление [12]
Алгоритмы
[ редактировать ]Наивный способ решения ILP — просто удалить ограничение на то, что x является целым числом, решить соответствующую задачу (называемую релаксацией LP для ILP), а затем округлить записи решения для релаксации LP. Но это решение может быть не только неоптимальным, но даже неосуществимым; то есть это может нарушить некоторые ограничения.
Использование полной унимодулярности
[ редактировать ]Хотя в целом решение релаксации ЛП не будет гарантированно целочисленным, если ILP имеет вид такой, что где и иметь все целочисленные записи и , полностью унимодулярна то каждое базовое допустимое решение является целым. Следовательно, решение, возвращаемое симплексным алгоритмом, гарантированно будет целым. Чтобы показать, что каждое базовое допустимое решение является целым, пусть быть произвольным базовым допустимым решением. С осуществимо,мы знаем это . Позволять — элементы, соответствующие базовым столбцам базового решения . По определению базиса существует некоторая квадратная подматрица из с линейно независимыми столбцами такими, что .




![{\displaystyle \mathbf {x} _{0}=[x_{n_{1}},x_{n_{2}},\cdots,x_{n_{j}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dfa84a77e8f9f05bb2dcbda53c5b400f8e899adf)


Поскольку столбцы линейно независимы и квадратный, является неособым,и, следовательно, по предположению, является унимодулярным и поэтому . Кроме того, поскольку неособа, обратима и, следовательно, . По определению, . Здесь обозначает сопряжение и является целым, поскольку является интегральным. Поэтому, Таким образом, если матрица ILP является полностью унимодулярным, вместо использования алгоритма ILP для решения релаксации LP можно использовать симплексный метод, и решение будет целочисленным.





Точные алгоритмы
[ редактировать ]Когда матрица не является полностью унимодулярным, существует множество алгоритмов, которые можно использовать для точного решения целочисленных линейных программ. Одним из классов алгоритмов являются методы секущей плоскости , которые работают путем решения LP-релаксации и последующего добавления линейных ограничений, которые приводят к тому, что решение становится целочисленным, не исключая каких-либо целочисленных возможных точек.
Другой класс алгоритмов — варианты метода ветвей и границ . Например, метод ветвей и разрезов , который сочетает в себе методы ветвей и границ и секущей плоскости. Алгоритмы ветвей и границ имеют ряд преимуществ перед алгоритмами, использующими только секущие плоскости. Одним из преимуществ является то, что алгоритмы могут быть прекращены досрочно, и пока найдено хотя бы одно интегральное решение, можно вернуть допустимое, хотя и не обязательно оптимальное, решение. Кроме того, решения ЛП-релаксаций можно использовать для оценки наихудшего случая того, насколько далеко от оптимальности находится возвращенное решение. Наконец, методы ветвей и границ можно использовать для получения нескольких оптимальных решений.
Точные алгоритмы для небольшого числа переменных
[ редактировать ]Предполагать является m целочисленной матрицей размером на n и является целочисленным вектором m -x1. Мы сосредотачиваемся на проблеме осуществимости, которая заключается в том, чтобы решить, существует ли вектор n -x1. удовлетворяющий .

Пусть V — максимальное абсолютное значение коэффициентов в и . Если n (количество переменных) является фиксированной константой, то проблема осуществимости может быть решена за полиномиальное от m и log V время . Это тривиально для случая n =1. Случай n =2 был решен в 1981 году Гербертом Скарфом . [13] Общий случай был решен в 1983 году Хендриком Ленстра , объединив идеи Ласло Ловаса и Питера ван Эмде Боаса . [14] Теорема Дуаньона утверждает, что целочисленная программа осуществима всякий раз, когда каждое подмножество ограничения возможны; метод, сочетающий этот результат с алгоритмами для задач типа ЛП, может быть использован для решения целочисленных программ за время, линейное по величине. и управляемый с фиксированными параметрами (FPT) в , но, возможно, дважды экспоненциальный по , без зависимости от . [15]




В частном случае ILP 0–1 алгоритм Ленстры эквивалентен полному перебору: число всех возможных решений фиксировано (2 н ), а проверка осуществимости каждого решения может быть выполнена за время poly( m , log V ). В общем случае, когда каждая переменная может быть произвольным целым числом, полное перечисление невозможно. Здесь алгоритм Ленстры использует идеи из «Геометрии чисел» . Он преобразует исходную задачу в эквивалентную, обладающую следующим свойством: либо существование решения очевидно, или значение ( n -я переменная) принадлежит интервалу, длина которого ограничена функцией от n . В последнем случае задача сводится к ограниченному числу задач меньшей размерности. Сложность алгоритма во время выполнения была улучшена в несколько этапов:

- Оригинальный алгоритм Lenstra [14] имел время выполнения .
- Каннан [16] представил улучшенный алгоритм со временем выполнения . [17]
- Фрэнк и Тардос [18] представил улучшенный алгоритм со временем выполнения . [19] [20] : Положение 8



- Дадуш [21] представил улучшенный алгоритм со временем выполнения .

- Рейс и Ротвосс [22] представил улучшенный алгоритм со временем выполнения .

Эти алгоритмы также подходят для смешанных целочисленных линейных программ (MILP) — программ, в которых некоторые переменные являются целочисленными, а некоторые — вещественными. [23] Оригинальный алгоритм Lenstra [14] : Раздел 5 имеет время выполнения , где n — количество целочисленных переменных, d — количество непрерывных переменных, а L — размер двоичного кодирования задачи. Используя методы из более поздних алгоритмов, фактор можно улучшить до или чтобы . [23]




Эвристические методы
[ редактировать ]Поскольку целочисленное линейное программирование является NP-сложным , многие экземпляры проблем неразрешимы, и поэтому вместо них необходимо использовать эвристические методы. Например, табу-поиск можно использовать для поиска решений ПДОДИ. [24] Чтобы использовать поиск с табу для решения задач ILP, ходы можно определить как увеличение или уменьшение переменной с целочисленным ограничением допустимого решения, сохраняя при этом все остальные переменные с целочисленными ограничениями постоянными. Затем вычисляются неограниченные переменные. Кратковременная память может состоять из ранее опробованных решений, тогда как среднесрочная память может состоять из значений целочисленных переменных, которые привели к высоким целевым значениям (при условии, что ILP является проблемой максимизации). Наконец, долговременная память может направлять поиск целочисленных значений, которые ранее не использовались.
Другие эвристические методы, которые можно применить к ILP, включают:
- восхождение на холм
- Имитация отжига
- Реактивная поисковая оптимизация
- Оптимизация колонии муравьев
- Нейронные сети Хопфилда
Существует также множество других эвристик, специфичных для конкретной задачи, например эвристика k-opt для задачи коммивояжера. Недостатком эвристических методов является то, что если они не могут найти решение, невозможно определить, происходит ли это из-за отсутствия допустимого решения или алгоритм просто не смог его найти. Кроме того, обычно невозможно количественно определить, насколько близко к оптимальному решение, возвращаемое этими методами.
Разреженное целочисленное программирование
[ редактировать ]Часто бывает, что матрица который определяет, что целочисленная программа является разреженной . В частности, это происходит, когда матрица имеет блочную структуру , что имеет место во многих приложениях. Разреженность матрицы можно измерить следующим образом. График имеет вершины, соответствующие столбцам , и два столбца образуют ребро, если имеет строку, в которой оба столбца имеют ненулевые записи. Эквивалентно, вершины соответствуют переменным, а две переменные образуют ребро, если они разделяют неравенство. Мера разреженности из – это минимум глубины дерева графа и глубину дерева графа транспонирования . Позволять быть числовой мерой определяется как максимальное абсолютное значение любой записи . Позволять — количество переменных целочисленной программы. Потом его показали в 2018 году [25] что целочисленное программирование может быть решено за строго полиномиальное и управляемое время с фиксированными параметрами, параметризованное и . То есть для некоторой вычислимой функции и некоторая константа , целочисленное программирование можно решить за время . В частности, время не зависит от правой части и целевая функция . Более того, в отличие от классического результата Ленстры, где число переменных является параметром, здесь число переменных — это переменная часть ввода.







См. также
[ редактировать ]- Ограниченные наименьшие квадраты
- Диофантово уравнение - Полиномиальное уравнение, целочисленные решения которого ищутся.
Ссылки
[ редактировать ]- ^ Карп, Ричард М. (1972). «Сводимость комбинаторных задач» (PDF) . В Р.Э. Миллере; Дж. В. Тэтчер; Дж. Д. Болингер (ред.). Сложность компьютерных вычислений . Нью-Йорк: Пленум. стр. 85–103. дои : 10.1007/978-1-4684-2001-2_9 . ISBN 978-1-4684-2003-6 .
- ^ «Смешанно-целочисленное линейное программирование (MILP): формулировка модели» (PDF) . Проверено 16 апреля 2018 г.
- ^ Пападимитриу, Швейцария ; Стейглиц, К. (1998). Комбинаторная оптимизация: алгоритмы и сложность . Минеола, Нью-Йорк: Дувр. ISBN 0486402584 .
- ^ Эриксон, Дж. (2015). «Сокращение целочисленного программирования» (PDF) . Архивировано из оригинала (PDF) 18 мая 2015 года.
- ^ Уильямс, HP (2009). Логическое и целочисленное программирование . Международная серия по исследованию операций и науке управления. Том. 130. ИСБН 978-0-387-92280-5 .
- ^ Борндорфер, Р.; Гретшель, М. (2012). «Проектирование телекоммуникационных сетей методом целочисленного программирования» (PDF) .
- ^ Шарма, Дипак (2010). «Частотное планирование» .
- ^ Мораис, Хьюго; Кадар, Питер; Фариа, Педро; Вейл, Зита А.; Ходр, Ее Величество (1 января 2010 г.). «Оптимальное планирование возобновляемой микросети в изолированной зоне нагрузки с использованием смешанно-целочисленного линейного программирования» . Возобновляемая энергия . 35 (1): 151–156. Бибкод : 2010REne...35..151M . doi : 10.1016/j.renene.2009.02.031 . hdl : 10400.22/1585 . ISSN 0960-1481 .
- ^ Ому, Акомено; Чоудхари, Ручи; Бойс, Адам (01 октября 2013 г.). «Оптимизация системы распределенных энергоресурсов с использованием смешанного целочисленного линейного программирования» . Энергетическая политика . 61 : 249–266. Бибкод : 2013EnPol..61..249O . дои : 10.1016/j.enpol.2013.05.009 . ISSN 0301-4215 . S2CID 29369795 .
- ^ Шувенаарс, Т.; Валенти, М.; Ферон, Э.; Как, Дж. (2005). «Результаты внедрения и летных испытаний системы наведения БПЛА на базе MILP». Аэрокосмическая конференция IEEE 2005 г. стр. 1–13. дои : 10.1109/AERO.2005.1559600 . ISBN 0-7803-8870-4 . S2CID 13447718 .
- ^ Радманеш, Мохаммадреза; Кумар, Маниш (01 марта 2016 г.). «Формирование полета БПЛА при наличии движущихся препятствий с использованием быстродинамического смешанного целочисленного линейного программирования» . Аэрокосмическая наука и технология . 50 : 149–160. Бибкод : 2016AeST...50..149R . дои : 10.1016/j.ast.2015.12.021 . ISSN 1270-9638 .
- ^ Баст, Ханна; Брози, Патрик; Сторандт, Сабина (05 октября 2017 г.). «Эффективное создание географически точных транзитных карт». arXiv : 1710.02226 [ cs.CG ].
- ^ Шарф, Герберт Э. (1981). «Производственные множества с неделимостью, Часть I: Общие положения» . Эконометрика . 49 (1): 1–32. дои : 10.2307/1911124 . ISSN 0012-9682 . JSTOR 1911124 .
- ^ Перейти обратно: а б с Ленстра, HW (1 ноября 1983 г.). «Целочисленное программирование с фиксированным числом переменных» . Математика исследования операций . 8 (4): 538–548. CiteSeerX 10.1.1.431.5444 . дои : 10.1287/moor.8.4.538 . ISSN 0364-765X .
- ^ Амента, Нина ; Де Лоэра, Хесус А .; Соберон, Пабло (2017). «Теорема Хелли: новые вариации и приложения». В Харрингтоне, Хизер А .; Омар, Мохамед; Райт, Мэтью (ред.). Материалы специальной сессии AMS по алгебраическим и геометрическим методам в прикладной дискретной математике, состоявшейся в Сан-Антонио, штат Техас, 11 января 2015 г. Современная математика. Том. 685. Провиденс, Род-Айленд: Американское математическое общество. стр. 55–95. arXiv : 1508.07606 . дои : 10.1090/conm/685 . ISBN 9781470423216 . МР 3625571 .
- ^ Каннан, Рави (1 августа 1987 г.). «Теорема Минковского о выпуклом теле и целочисленное программирование» . Математика исследования операций . 12 (3): 415–440. дои : 10.1287/moor.12.3.415 . ISSN 0364-765X . S2CID 495512 .
- ^ Гоеманс, Мишель X .; Ротвосс, Томас (07.11.2020). «Полиномиальность упаковки контейнеров с постоянным количеством типов предметов» . Журнал АКМ . 67 (6): 38:1–38:21. дои : 10.1145/3421750 . hdl : 1721.1/92865 . ISSN 0004-5411 . S2CID 227154747 .
- ^ Франк, Андраш; Тардос, Ева (1 марта 1987 г.). «Применение одновременной диофантовой аппроксимации в комбинаторной оптимизации» . Комбинаторика . 7 (1): 49–65. дои : 10.1007/BF02579200 . ISSN 1439-6912 . S2CID 45585308 .
- ^ Блим, Бернхард; Бредерек, Роберт; Нидермайер, Рольф (9 июля 2016 г.). «Сложность эффективного и свободного от зависти распределения ресурсов: мало агентов, ресурсов или уровней полезности» . Материалы двадцать пятой Международной совместной конференции по искусственному интеллекту . IJCAI'16. Нью-Йорк, Нью-Йорк, США: AAAI Press: 102–108. ISBN 978-1-57735-770-4 .
- ^ Бредерек, Роберт; Качмарчик, Анджей; Кноп, Душан; Нидермайер, Рольф (17 июня 2019 г.). «Справедливое распределение с высокой кратностью: Lenstra на базе N-кратного целочисленного программирования» . Материалы конференции ACM по экономике и вычислениям 2019 года . ЕС '19. Финикс, Аризона, США: Ассоциация вычислительной техники. стр. 505–523. дои : 10.1145/3328526.3329649 . ISBN 978-1-4503-6792-9 . S2CID 195298520 .
- ^ Дадуш, Дэниел (14 июня 2012 г.). «Целочисленное программирование, решетчатые алгоритмы и детерминированная оценка объема .
- ^ Рейс, Виктор; Ротвосс, Томас (26 марта 2023 г.). «Гипотеза о плоскостности подпространства и более быстрое целочисленное программирование» .
- ^ Перейти обратно: а б Хильдебранд, Роберт (07 октября 2016 г.). «Алгоритм FPT для программы смешанных целых чисел» . Обмен стеками теоретической информатики . Проверено 21 мая 2024 г.
- ^ Гловер, Ф. (1989). «Поиск Табу-Часть II». Журнал ORSA по вычислительной технике . 1 (3): 4–32. дои : 10.1287/ijoc.2.1.4 . S2CID 207225435 .
- ^ Кутецкий, Мартин; Левин, Асаф; Онн, Шмуэль (2018). «Параметризованный сильно полиномиальный алгоритм для целочисленных программ с блочной структурой». В Хацигианнакисе, Иоаннис; Какламанис, Христос; Маркс, Даниэль; Саннелла, Дональд (ред.). 45-й Международный коллоквиум по автоматам, языкам и программированию, ICALP 2018, 9–13 июля 2018 г., Прага, Чехия . ЛИПИ. Том. 107. Замок Дагштуль – Центр информатики Лейбница. стр. 85:1–85:14. arXiv : 1802.05859 . doi : 10.4230/LIPICS.ICALP.2018.85 .
Дальнейшее чтение
[ редактировать ]- Джордж Л. Немхаузер ; Лоуренс А. Уолси (1988). Целочисленная и комбинаторная оптимизация . Уайли. ISBN 978-0-471-82819-8 .
- Александр Шрийвер (1998). Теория линейного и целочисленного программирования . Джон Уайли и сыновья. ISBN 978-0-471-98232-6 .
- Лоуренс А. Уолси (1998). Целочисленное программирование . Уайли. ISBN 978-0-471-28366-9 .
- Димитрис Берцимас; Роберт Вейсмантель (2005). Оптимизация по целым числам . Динамические идеи. ISBN 978-0-9759146-2-5 .
- Джон К. Карлоф (2006). Целочисленное программирование: теория и практика . ЦРК Пресс. ISBN 978-0-8493-1914-3 .
- Х. Пол Уильямс (2009). Логическое и целочисленное программирование . Спрингер. ISBN 978-0-387-92279-9 .
- Михаэль Юнгер; Томас М. Либлинг; Денис Наддеф; Джордж Немхаузер ; Уильям Р. Пуллибланк ; Герхард Рейнельт; Джованни Ринальди; Лоуренс А. Уолси, ред. (2009). 50 лет целочисленного программирования, 1958–2008: от ранних лет до современных достижений . Спрингер. ISBN 978-3-540-68274-5 .
- Дер-Сан Чен; Роберт Г. Бэтсон; Ю Данг (2010). Прикладное целочисленное программирование: моделирование и решение . Джон Уайли и сыновья. ISBN 978-0-470-37306-4 .
- Жерар Сиерксма; Йори Зволс (2015). Линейная и целочисленная оптимизация: теория и практика . ЦРК Пресс. ISBN 978-1-498-71016-9 .
Внешние ссылки
[ редактировать ]- Учебник по целочисленному программированию
- Конференция «Целочисленное программирование и комбинаторная оптимизация», IPCO
- Семинар по комбинаторной оптимизации Aussois
 | |||||||||||||||
| |||||||||||||||