Свободная схема тела
В физике и технике — диаграмма свободного тела ( FBD ; также называемая диаграммой сил ). [1] — графическая иллюстрация, используемая для визуализации приложенных сил , моментов и возникающих в результате реакций на тело в заданном состоянии. На нем изображается тело или связанные тела со всеми приложенными силами и моментами, а также реакциями, действующими на тело(а). Тело может состоять из нескольких внутренних элементов (например, фермы ) или представлять собой компактное тело (например, балку ). Для решения сложных задач может потребоваться серия свободных тел и других диаграмм. Иногда для графического расчета равнодействующей силы приложенные силы располагаются в виде ребер многоугольника сил. [2] или многоугольник сил (см. § Многоугольник сил ).
Цель
[ редактировать ]Диаграммы свободного тела используются для визуализации сил и моментов, приложенных к телу, а также для расчета реакций в задачах механики. Эти диаграммы часто используются как для определения нагрузки на отдельные элементы конструкции, так и для расчета внутренних сил внутри конструкции. Они используются в большинстве инженерных дисциплин, от биомеханики до структурной инженерии. [3] [4] В образовательной среде диаграмма свободного тела является важным шагом в понимании определенных тем, таких как статика , динамика и другие формы классической механики .
Функции
[ редактировать ]Диаграмма свободного тела — это не масштабированный рисунок, это диаграмма. Символы, используемые на диаграмме свободного тела, зависят от того, как моделируется тело. [5]
Диаграммы свободного тела состоят из:
- Упрощенная версия тела (часто точка или прямоугольник)
- Силы показаны прямыми стрелками, указывающими направление их действия на тело.
- Моменты изображаются в виде кривых со стрелкой или вектора с двумя стрелками, указывающими направление действия на тело.
- Одна или несколько опорных систем координат.
- По соглашению реакции на приложенные силы обозначаются штрихами через основу вектора.
Количество показанных сил и моментов зависит от конкретной задачи и сделанных допущений. Общие предположения пренебрегают сопротивлением воздуха и трением и предполагают действие твердого тела.
В статике все силы и моменты должны уравновешиваться нулю; физическая интерпретация такова: если этого не происходит, тело ускоряется и принципы статики неприменимы. В динамике результирующие силы и моменты могут быть отличными от нуля.
Диаграммы свободного тела могут не представлять все физическое тело. Для анализа можно выбрать части тела. Этот метод позволяет рассчитывать внутренние силы, делая их внешними, что позволяет проводить анализ. Это можно использовать несколько раз для расчета внутренних сил в разных местах физического тела.
Например, гимнаст, выполняющий железный крест : моделирование канатов и человека позволяет рассчитать общие силы (вес тела, без учета веса каната, бриза, плавучести, электростатики, теории относительности, вращения Земли и т. д.). Затем уберите человека и покажите только одну веревку; вы получаете направление силы. Тогда, только глядя на человека, можно посчитать силы на руке. Теперь посмотрите только на руку, чтобы рассчитать силы и моменты в плечах, и так далее, пока не будет рассчитан компонент, который нужно проанализировать.
Моделирование тела
[ редактировать ]Тело можно моделировать тремя способами:
- частица . Эту модель можно использовать, когда любые эффекты вращения равны нулю или не представляют интереса, даже если само тело может быть расширено. Тело может быть представлено небольшим символическим пятном, а диаграмма сводится к набору совпадающих стрелок. Сила, действующая на частицу, представляет собой связанный вектор.
- жесткий расширенный . Напряжения и деформации не представляют интереса, а эффекты вращения. Силовая стрелка должна лежать вдоль силовой линии, но где именно, не имеет значения. Сила, действующая на протяженное твердое тело, представляет собой вектор скольжения .
- нежесткий расширенный . Точка приложения силы становится решающей и ее необходимо указать на схеме. Сила, действующая на нетвердое тело, является связанным вектором. Некоторые используют хвост стрелы, чтобы указать точку приложения. Другие используют подсказку.
используйте диаграмму, чтобы объяснить, где находится неспецифическая защита и являются ли они химическими или просто барьерами.
Что включено
[ редактировать ]FBD представляет собой объект интереса и внешние силы, действующие на него.
- Тело: Обычно это схематическая схема, зависящая от тела — частица/протяжённость, жёсткость/нежесткость – и от того, на какие вопросы необходимо ответить. Таким образом, если учитывается вращение тела и крутящий момент , необходимо указать размер и форму тела. Например, пикирование тормоза мотоцикла невозможно найти из одной точки, и требуется эскиз с конечными размерами.
- Внешние силы: они обозначены стрелками. В полностью решенной задаче силовая стрелка способна указать
- направление и линия действия [примечания 1]
- величина
- точка приложения
- реакция, а не приложенная сила, если через стержень стрелы проходит засечка
Часто предварительное свободное тело рисуется еще до того, как все станет известно. Цель диаграммы — помочь определить величину, направление и точку приложения внешних нагрузок. Когда сила изначально нарисована, ее длина может не указывать на величину. Его линия может не соответствовать точной линии действия. Даже его ориентация может быть неправильной.
Внешние силы, о которых известно, что они оказывают незначительное влияние на анализ, могут быть опущены после тщательного рассмотрения (например, выталкивающие силы воздуха при анализе стула или атмосферное давление при анализе сковороды).
Внешние силы, действующие на объект, могут включать трение , гравитацию , нормальную силу , сопротивление , напряжение или человеческую силу, возникающую в результате толкания или притяжения. В неинерциальной системе отсчета (см. систему координат ниже) фиктивные силы , такие как центробежная псевдосила уместны .
Всегда включена хотя бы одна система координат , выбранная для удобства. Разумный выбор системы координат может упростить определение векторов при написании уравнений движения или статики. Направление x для направления вниз по наклонной плоскости в задаче с наклонной плоскостью может быть выбрано , например, . В этом случае сила трения имеет только компонент x , а нормальная сила имеет только компонент y . Тогда сила гравитации будет иметь компоненты как в направлениях x, так и в направлениях y : mg sin( θ ) в направлении x и mg cos( θ ) в направлении y , где θ — угол между наклоном и горизонталью.
Исключения
[ редактировать ]На диаграмме свободного тела не должно быть показано:
- Тела, отличные от свободного тела.
- Ограничения.
- (Тело не свободно от ограничений; ограничения только что заменены силами и моментами, действующими на тело.)
- Силы, действующие со стороны свободного тела.
- (Диаграмма, показывающая силы, действующие как на тело , так и со стороны него, вероятно, сбивает с толку, поскольку все силы уравновешиваются. Согласно третьему закону Ньютона, если тело A оказывает воздействие на тело B , то B оказывает равную и противоположную силу на A. тело Это не следует путать с равными и противоположными силами, которые необходимы для удержания тела в равновесии.)
- Внутренние силы.
- (Например, если вся ферма , силы между отдельными элементами фермы не учитываются.) анализируется
- Векторы скорости или ускорения.
Анализ
[ редактировать ]В анализе используется диаграмма свободного тела путем суммирования всех сил и моментов (часто выполняемых вдоль или вокруг каждой из осей). Когда сумма всех сил и моментов равна нулю, тело покоится или движется и/или вращается с постоянной скоростью согласно первому закону Ньютона . Если сумма не равна нулю, то тело ускоряется в направлении или вокруг оси согласно второму закону Ньютона .
Силы, не выровненные по оси
[ редактировать ]
Определить сумму сил и моментов легко, если они совпадают с осями координат, но сложнее, если некоторые из них не совпадают. Удобно использовать компоненты сил, при этом символы ΣF x и ΣF y вместо ΣF используются (переменная M используется для моментов).
Силы и моменты, находящиеся под углом к оси координат, можно переписать в виде двух векторов, эквивалентных исходному (или трех, для трехмерных задач) — каждый вектор направлен вдоль одной из осей ( F x ) и ( F y ).
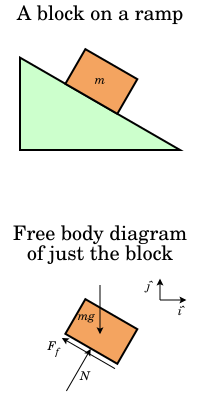
Пример: блок на наклонной плоскости.
[ редактировать ]Это иллюстрирует показанная выше простая диаграмма свободного тела блока на пандусе.
- Все внешние опоры и конструкции были заменены силами, которые они порождают. К ним относятся:
- мг : произведение массы блока и константы ускорения гравитации: его веса.
- N : нормальная сила рампы.
- F f : сила трения рампы.
- Векторы сил показывают направление и точку приложения и помечены их величиной.
- Он содержит систему координат, которую можно использовать при описании векторов.
При интерпретации диаграммы необходима определенная осторожность.
- Было показано, что нормальная сила действует в средней точке основания, но если блок находится в статическом равновесии, его истинное положение находится непосредственно под центром масс, где действует вес, поскольку это необходимо для компенсации момента трения. .
- В отличие от веса и нормальной силы, которые, как ожидается, будут действовать на кончике стрелы, сила трения представляет собой вектор скольжения, и, следовательно, точка приложения не имеет значения, и трение действует вдоль всего основания.
Многоугольник сил
[ редактировать ]
В случае двух приложенных сил их сумму ( результирующую силу ) можно найти графически с помощью параллелограмма сил .
Чтобы графически определить результирующую силу нескольких сил, действующие силы можно расположить в виде ребер многоугольника , присоединив начало одного вектора силы к концу другого в произвольном порядке. Тогда векторное значение равнодействующей силы будет определяться недостающим краем многоугольника. [2] На схеме силы от Р 1 до Р 6 приложены к точке О. Многоугольник строится, начиная с Р 1 и Р 2, с помощью параллелограмма сил ( вершина а). Процесс повторяется (добавление P 3 дает вершину b и т. д.). Оставшийся край многоугольника Oe представляет собой равнодействующую силу R.
Кинетическая диаграмма
[ редактировать ]
В динамике кинетическая диаграмма — это графическое устройство, используемое при анализе задач механики, когда определяется, что на тело действует результирующая сила и/или момент. Они связаны со схемами свободного тела и часто используются с ними, но изображают только чистую силу и момент, а не все рассматриваемые силы.
Кинетические диаграммы не требуются для решения задач динамики; против их использования в обучении динамике выступают некоторые [6] в пользу других методов, которые они считают более простыми. Они появляются в некоторых текстах по динамике. [7] но отсутствуют в других. [8]
См. также
[ редактировать ]- Классическая механика
- Анализ силового поля - применение силовой диаграммы в социальных науках
- Кинематическая схема
- Физика
- Диаграммы сдвига и моментов
- Прочность материалов
Ссылки
[ редактировать ]- ^ «Силовые диаграммы (диаграммы свободного тела)» . Университет Западного Кентукки . Архивировано из оригинала 17 марта 2011 г. Проверено 17 марта 2011 г.
- ^ Jump up to: а б Ренни и Ло, 2019 .
- ^ Руина, Энди; Пратап, Рудра (2010). Введение в статику и динамику (PDF) . Издательство Оксфордского университета. стр. 79–105 . Проверено 4 августа 2006 г.
- ^ Хиббелер, Р.К. (2007). Инженерная механика: статика и динамика (11-е изд.). Пирсон Прентис Холл. стр. 83–86. ISBN 978-0-13-221509-1 .
- ^ Пури, Авинаш (1996). «Искусство диаграмм свободного тела». Физическое образование . 31 (3): 155. Бибкод : 1996PhyEd..31..155P . дои : 10.1088/0031-9120/31/3/015 . S2CID 250802652 .
- ^ Крейдж, Л. Гленн (16 июня 2002 г.), Роль кинетической диаграммы в преподавании вводной динамики твердого тела в прошлом, настоящем и будущем , стр. 7.1182.1–7.1182.11
- ^ «Стресс и динамика» (PDF) . Проверено 5 августа 2015 г.
- ^ Руина, Энди; Пратап, Рудра (2002). Введение в статику и динамику . Издательство Оксфордского университета . Проверено 4 сентября 2019 г.
Источники
[ редактировать ]- Ренни, Ричард; Ло, Джонатан, ред. (2019). «многоугольник сил» . Физический словарь (8-е изд.). Издательство Оксфордского университета. ISBN 9780198821472 .
Примечания
[ редактировать ]- ^ Линия действий важна там, где важен момент.
Внешние ссылки
[ редактировать ]- «Диаграмма формы — Диаграмма сил — Диаграмма свободного тела» (PDF) . РАВНОВЕСИЕ . Группа исследований блоков (BRG) в Технологическом институте архитектуры ETH Zürich . Проверено 31 января 2024 г.