Рычаг
| Рычаг | |
|---|---|
 Рычаги можно использовать для приложения большой силы на небольшом расстоянии на одном конце, прилагая лишь небольшую силу (усилие) на большем расстоянии на другом. | |
| Классификация | Простая машина |
| Компоненты | точка опоры или стержень, нагрузка и усилие |
| Примеры | качели, открывалка для бутылок и т. д. |
Рычаг состоящая — это простая машина, из балки или жесткого стержня, шарнирно закрепленного на фиксированном шарнире или точке опоры . Рычаг – это твердое тело, способное вращаться в некоторой точке на самом себе. По расположению точек опоры, нагрузке и усилию рычаг подразделяется на три типа . Это одна из шести простых машин, идентифицированных учеными эпохи Возрождения. Рычаг усиливает входную силу, обеспечивая большую выходную силу, которая, как говорят, обеспечивает рычаг , который представляет собой механическое преимущество, полученное в системе, равное отношению выходной силы к входной силе. Таким образом, рычаг представляет собой механическое преимущество , сочетающее силу с движением.
Этимология [ править ]
Слово «рычаг» вошло в английский язык около 1300 года нашей эры из старофранцузского : levier . Оно произошло от основы глагола « рычаг» , означающего «поднимать». Глагол, в свою очередь, восходит к латыни : levare , [1] Само слово происходит от прилагательного levis , означающего «легкий» (например, «не тяжелый»). Первоначальное происхождение слова - протоиндоевропейская основа legwh- , означающая, среди прочего, «легкий», «легкий» или «проворный». Основа PIE также дала начало английскому слову «light». [2]
История [ править ]
Самые ранние свидетельства существования рычажного механизма относятся к древнему Ближнему Востоку ок. 5000 г. до н. э. , когда он впервые был использован в простых весах . [3] В Древнем Египте ок. 4400 г. до н.э. с горизонтальной рамой использовалась ножная педаль для самого раннего ткацкого станка . [4] В Месопотамии (современный Ирак) ок. В 3000 году до нашей эры был изобретен шадуф — устройство , похожее на кран, использующее рычажный механизм. [3] В Древнем Египте рабочие использовали рычаг для перемещения и поднятия обелисков весом более 100 тонн. Об этом свидетельствуют выемки в больших блоках и выступах для манипуляций , которые нельзя было использовать ни для каких целей, кроме как для рычагов. [5]
Самые ранние сохранившиеся сочинения о рычагах датируются III веком до нашей эры и, по общему мнению, были предоставлены греческим математиком Архимедом , который, как известно, заявил: «Дайте мне рычаг достаточной длины и точку опоры, на которой я могу его поместить, и я сдвину рычаг». мир."
Отэм Стэнли утверждает, что палку-копальщик можно считать первым рычагом, который позиционирует доисторических женщин как изобретателей рычажной технологии. [6]
Сила и рычаги [ править ]
Рычаг — это балка, соединенная с землей шарниром или шарниром, называемым точкой опоры. Идеальный рычаг не рассеивает и не накапливает энергию, а значит, нет трения в шарнире или изгиба балки. В этом случае мощность, поступающая на рычаг, равна выходной мощности, а отношение выходной силы к входной силе определяется соотношением расстояний от точки опоры до точек приложения этих сил. Это известно как закон рычага .
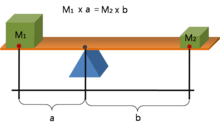
Механическое преимущество рычага можно определить, рассмотрев баланс моментов или крутящего момента T относительно точки опоры. Если пройденное расстояние больше, то выходная сила уменьшается.

где F 1 — входная сила рычага, а F 2 — выходная сила. Расстояния a и b представляют собой перпендикулярные расстояния между силами и точкой опоры.
Поскольку моменты крутящих моментов должны быть уравновешены, . Так, .


Механическое преимущество рычага — это отношение выходной силы к входной силе.

Это соотношение показывает, что механическое преимущество можно вычислить по соотношению расстояний от точки опоры до места, где к рычагу прикладываются входная и выходная силы, при условии, что рычаг невесом и отсутствуют потери из-за трения, гибкости или износа. Это остается верным, даже несмотря на то, что «горизонтальное» расстояние (перпендикулярное силе тяжести) как a, так и b изменяется (уменьшается), когда рычаг переходит в любое положение вдали от горизонтали.
Классы рычагов [ править ]
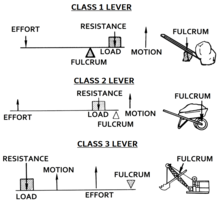

Рычаги классифицируются по относительному положению точки опоры, усилию и сопротивлению (или нагрузке). Входную силу принято называть «усилием», а выходную силу — «нагрузкой» или «сопротивлением». Это позволяет идентифицировать три класса рычагов по относительному расположению точки опоры, сопротивлению и усилию: [7]
- Класс I – точка опоры расположена между усилием и сопротивлением: усилие прикладывается на одной стороне точки опоры, а сопротивление (или нагрузка) – на другой стороне. Например, качели , лом , ножницы , весы , плоскогубцы и молоток . (выдергивание гвоздя) Если точка опоры находится посередине, механическое преимущество рычага может быть больше, меньше или даже равно 1.
- Класс II – Сопротивление (или нагрузка) расположено между усилием и точкой опоры: усилие прикладывается с одной стороны сопротивления, а точка опоры расположена с другой стороны, например , тачка , щелкунчик , открывалка для бутылок , гаечный ключ. , и тормоза педаль автомобиля. Поскольку рычаг нагрузки меньше рычага усилия, механическое преимущество рычага всегда больше 1. Его также называют рычагом множителя усилия.
- Класс III – Усилие расположено между сопротивлением и точкой опоры: сопротивление (или нагрузка) прикладывается с одной стороны усилия, а точка опоры расположена с другой стороны, например, пинцет , молоток , щипцы . , удочка и нижняя челюсть человеческого черепа. Поскольку рычаг усилия меньше рычага нагрузки, механическое преимущество рычага всегда меньше 1. Его также называют рычагом множителя скорости.
Эти случаи описываются мнемоникой fre 123 , где точка опоры f находится между r и e для рычага 1-го класса, сопротивление r находится между f и e для рычага 2-го класса, а усилие e находится между f и r для рычага 3-го класса. классовый рычаг.
Сложный рычаг [ править ]
состоит Сложный рычаг из нескольких рычагов, действующих последовательно: сопротивление одного рычага в системе рычагов действует как усилие для другого, и, таким образом, приложенная сила передается от одного рычага к другому. Примеры составных рычагов включают весы, кусачки для ногтей и клавиши фортепиано.
Молоточек — , наковальня и стремечко это небольшие косточки в среднем ухе виде сложных рычагов, которые передают звуковые волны от барабанной перепонки к овальному окну улитки , соединенные в .
Закон рычага [ править ]
Рычаг представляет собой подвижную штангу, которая поворачивается на опоре, прикрепленной к фиксированной точке. Рычаг действует путем приложения сил на разных расстояниях от точки опоры или шарнира.
Когда рычаг вращается вокруг точки опоры, точки, находящиеся дальше от этой оси, перемещаются быстрее, чем точки, расположенные ближе к оси. Следовательно, сила, приложенная к точке, расположенной дальше от оси вращения, должна быть меньше силы, расположенной в точке ближе, поскольку мощность является произведением силы и скорости. [8]
Если a и b — расстояния от точки опоры до точек A и B , а сила F A, приложенная к A, является входной, а сила F B, приложенная к B, — выходной, отношение скоростей точек A и B определяется выражением a/b , поэтому мы имеем отношение выходной силы к входной силе, или механическое преимущество, определяется выражением:

Это закон рычага , который был доказан Архимедом с помощью геометрических рассуждений. [9] Он показывает, что если расстояние a от точки опоры до места приложения входной силы (точка A ) больше, чем расстояние b от точки опоры до места приложения выходной силы (точка B ), то рычаг усиливает входную силу. С другой стороны, если расстояние a от точки опоры до входной силы меньше, чем расстояние b от точки опоры до выходной силы, то рычаг уменьшает входную силу.
Использование скорости в статическом анализе рычага представляет собой применение принципа виртуальной работы .
Виртуальная работа и закон рычага [ править ]
Рычаг моделируется как жесткий стержень, соединенный с опорной рамой шарнирным соединением, называемым точкой опоры. Рычаг приводится в действие путем приложения входной силы F A в точке A, расположенной по координатному вектору r A на стержне. Затем рычаг прикладывает выходную силу F B в точке B, расположенной через r B . Поворот рычага вокруг точки опоры P определяется углом поворота θ в радианах.

Пусть вектор координат точки P , определяющей точку опоры, равен r P , и введем длины

которые представляют собой расстояния от точки опоры до входной точки A и до выходной точки B соответственно.
Теперь введем единичные векторы e A и e B от точки опоры до точки A и B , так что

Скорость точек A и B определяется как

где е А ⊥ и е Б ⊥ — единичные векторы, перпендикулярные e A и e B соответственно.
Угол θ является обобщенной координатой , определяющей конфигурацию рычага, а обобщенная сила, связанная с этой координатой, определяется выражением

где F A и F B — составляющие сил, перпендикулярных радиальным отрезкам PA и PB . Принцип виртуальной работы гласит, что в состоянии равновесия обобщенная сила равна нулю, то есть


Таким образом, отношение выходной силы F B к входной силе F A получается как

в этом механическое преимущество рычага.
Это уравнение показывает, что если расстояние a от точки опоры до точки A , к которой прилагается входная сила, больше, чем расстояние b от точки опоры до точки B , где прилагается выходная сила, то рычаг усиливает входную силу. Если верно обратное: расстояние от точки опоры до входной точки А меньше, чем от точки опоры до выходной точки В , то рычаг уменьшает величину входной силы.
См. также [ править ]
- Прикладная механика – Практическое применение механики.
- Балансировочная рычажная муфта
- качели
- Связь (механическая) - сборка систем, связанных для управления силами и движением.
- Механизм (техника) - Устройство, используемое для передачи сил неэлектрическими средствами.
- О равновесии плоскостей - Механический трактат Архимеда
- Простая машина - механическое устройство, изменяющее направление или величину силы.
Ссылки [ править ]
- ^ Чисхолм, Хью , изд. (1911). . Британская энциклопедия . Том. 16 (11-е изд.). Издательство Кембриджского университета. п. 510.
- ^ «Этимология слова «рычаг» в Этимологическом Интернете» . Архивировано из оригинала 12 мая 2015 г. Проверено 29 апреля 2015 г.
- ^ Jump up to: Перейти обратно: а б Пайпетис, SA; Чеккарелли, Марко (2010). Гений Архимеда - 23 века влияния на математику, науку и технику: материалы международной конференции, состоявшейся в Сиракузах, Италия, 8-10 июня 2010 г. Springer Science & Business Media . п. 416. ИСБН 9789048190911 .
- ^ Бруно, Леонард К.; Олендорф, Донна (1997). Наука и технологии прежде всего . Гейл Исследования . п. 2 . ISBN 9780787602567 .
4400 г. до н. э. Самым ранним свидетельством использования горизонтального ткацкого станка является его изображение на глиняном блюде, найденном в Египте и датированном этим временем. Эти первые ткацкие станки с настоящей рамой оснащены ножными педалями для подъема нитей основы, оставляя руки ткача свободными для пропускания и обматывания уточной нити.
- ^ Кларк, Сомерс; Энгельбах, Реджинальд (1990). Древнеегипетское строительство и архитектура . Курьерская компания . стр. 86–90. ISBN 9780486264851 .
- ^ Стэнли, Осень (1983). « Женщины держат две трети неба: заметки к пересмотренной истории технологий» . В Ротшильде, Джоан (ред.). Machina Ex Dea: феминистские взгляды на технологии . Пергамон Пресс.
- ^ Давидовиц, Павел (2008). «Глава 1» . Физика в биологии и медицине (3-е изд.). Академическая пресса. п. 10. ISBN 978-0-12-369411-9 . Архивировано из оригинала 3 января 2014 г. Проверено 23 февраля 2016 г.
- ^ Уикер, Джон; Пеннок, Гордон; Шигли, Джозеф (2010). Теория машин и механизмов (4-е изд.). Издательство Оксфордского университета США. ISBN 978-0-19-537123-9 .
- ^ Ашер, AP (1929). История механических изобретений . Издательство Гарвардского университета (перепечатано Dover Publications, 1988 г.). п. 94. ИСБН 978-0-486-14359-0 . OCLC 514178 . Архивировано из оригинала 26 июля 2020 года . Проверено 7 апреля 2013 г.
Внешние ссылки [ править ]
- Рычаг в научно-технической энциклопедии Diracdelta
- Простой рычаг Стивена Вольфрама , Демонстрационный проект Вольфрама .
- Рычаги: простые машины на EnchantedLearning.com
| Базы данных органов управления : Национальные |
|---|