Пакет теплового потока и физических свойств
 Впечатление художника о HP 3 на поверхности Марса | |
| Оператор | НАСА |
|---|---|
| Производитель | Немецкий аэрокосмический центр (DLR) |
| Тип инструмента | инфракрасный радиометр , теплопроводности датчик |
| Функция | Геофизика Марса |
| Продолжительность миссии | 2 года на Марсе (планируется) |
| Начало деятельности | Дата посадки: 26 ноября 2018 г. |
| Веб-сайт | Марс |
| Характеристики | |
| Масса | 3 кг (6,6 фунта) |
| Потребляемая мощность | 2 Вт |
| Хост-космический корабль | |
| Космический корабль | InSight Марсианский посадочный модуль |
| Оператор | НАСА |
| Дата запуска | 5 мая 2018, 11:05 UTC |
| Ракета | Atlas V 401 [1] |
| Запуск сайта | Ванденберг SLC-3E [1] |
| ИДЕНТИФИКАТОР КОСПЭРЭ | 2018-042А |
Пакет « Тепловой поток и физические свойства» ( HP 3 ) — научная полезная нагрузка на борту посадочного модуля InSight , оснащенная инструментами для изучения теплового потока и других тепловых свойств Марса . Один из инструментов, роющий зонд, получивший прозвище «крот», был спроектирован так, чтобы проникать на глубину 5 м (16 футов) под поверхность Марса. В марте 2019 года крот зарылся на несколько сантиметров, но затем из-за разных факторов не смог продвигаться вперед. В следующем году были предприняты дальнейшие попытки решить эти проблемы, но без особого прогресса. [2] 14 января 2021 года было объявлено, что попытки бурения поверхности Марса с помощью аппарата прекращены. [3]
HP 3 был предоставлен Немецким аэрокосмическим центром (DLR). Ударный механизм внутри крота был разработан польской компанией Astronika и Центром космических исследований Польской академии наук по контракту и в сотрудничестве с DLR. [4] [5]
Главный исследователь — Тилман Шпон из Немецкого аэрокосмического центра. [6] [7]
Обзор
[ редактировать ]Целью миссии было понять происхождение и разнообразие планет земной группы . [6] Информация от HP 3 Ожидалось, что пакет теплового потока покажет, образовались ли Марс и Земля из одного и того же материала, и определит, насколько активна недра Марса сегодня. [6] [7] [8] [9] Дополнительные научные цели включали определение толщины коры Марса, состава его мантии и тепловых характеристик недр, таких как температурный градиент и тепловой поток. [10]
Вместе с сейсмометром миссия оценит размер ядра Марса и то, является ли оно жидким или твердым. [11] Вибрации, создаваемые кротом, отслеживались SEIS, чтобы узнать о местных недрах. [12]
Помимо крота, HP 3 включает инфракрасный радиометр (HP3-RAD), установленный на посадочной платформе, также предоставленный DLR. [13] [14] [15]

HP 3 Датчик теплового потока состоит из следующих подсистем: [16]
- Опорная конструкция (SS) — корпус, который включает в себя:
- Инженерный трос (ET) для связи между опорной конструкцией и посадочным модулем.
- Science Tether (TEM-P) — гибкая печатная плата с 14 платиновыми термометрами сопротивления для измерения тепловых свойств реголита.
- Оптический измеритель длины троса (TLM) для измерения развернутой длины научного троса.
- Инфракрасный радиометр (HP3-RAD) для измерения температуры поверхности.
- Электронный блок управления задней электроникой (BEE)
- Кротовий пенетрометр для зарывания под поверхность
- ТЕМ-А Датчик активной теплопроводности
- STATIL Наклонметр для определения ориентации и направления родинки.
Разработка
[ редактировать ]
HP 3 was conceived by Gromov V. V. et al. in 1997, [4] [17] и впервые был использован в качестве инструмента PLUTO во время неудачной миссии посадочного модуля Beagle 2 на Марс в 2003 году. [4] HP 3 развивалась дальше, и в 2001 году была предложена миссия на Меркурий . [18] в 2009 году Европейскому космическому агентству в составе полезной нагрузки «Гумбольдта» на борту спускаемого аппарата «ЭкзоМарс» , [19] [18] в 2010 году для миссии на Луну, [20] а в 2011 году он был предложен программе НАСА Discovery в качестве полезной нагрузки для спускаемого аппарата InSight на Марс, известного в то время как GEMS (Станция геофизического мониторинга). [8] InSight был запущен 5 мая 2018 года и приземлился 26 ноября 2018 года.
Кротовый пенетрометр
[ редактировать ]Крот описывается как «самозабивной гвоздь» и был спроектирован так, чтобы зарываться под поверхность Марса, волоча за собой трос со встроенными нагревателями и датчиками температуры. Целью было измерить тепловые свойства недр Марса и таким образом получить уникальную информацию о геологической истории планеты. [4]
Роющий крот представляет собой заостренный цилиндр с гладкой внешней поверхностью примерно 35 см (14 дюймов) в длину и 3,5 см (1,4 дюйма) в диаметре. Он содержит нагреватель для определения теплопроводности во время спуска, а также трос, оснащенный точными тепловыми датчиками, расположенными с интервалом 10 см (3,9 дюйма) для измерения профиля температуры под поверхностью. [6] [7]
Кротопроникновитель предназначен для размещения рядом с посадочным модулем на площадке длиной около 3 м и шириной 2 м. [21] Общая масса системы составляет около 3 кг (6,6 фунта), и она потребляет максимум 2 Вт· с, пока «крот» активен. [7]
Для перемещения крот использует двигатель и коробку передач (предоставленные Maxon ), а также кулачковый ролик, который периодически нагружает пружину, соединенную со стержнем, который действует как молоток. После освобождения из кулачка молот ускоряется вниз, ударяя по внешней оболочке и вызывая проникновение сквозь реголит . При этом масса-подавитель движется вверх, а ее кинетическая энергия компенсируется гравитационным потенциалом и сжатием тормозной пружины и спирали проволоки на противоположной стороне крота. [4]
В принципе, каждые 50 см (20 дюймов) зонд излучает тепловой импульс, а его датчики измеряют, как тепловой импульс меняется со временем. Если материал коры является проводником тепла, например, металлом, импульс быстро затухнет. [7] Сначала кроту дают остыть в течение двух дней, затем его нагревают примерно до 10 °C (50 °F) в течение 24 часов. Датчики температуры внутри троса измеряют, насколько быстро это происходит, что говорит ученым о теплопроводности почвы. [22] Вместе эти измерения дают скорость потока тепла изнутри.
HP 3 Первоначально предполагалось, что кроту потребуется около 40 дней, чтобы достичь глубины 5 м (16 футов). [23] но в конечном итоге после более чем года усилий удалось достичь всего лишь нескольких сантиметров. Когда крот зарывается в норы, он генерирует вибрации, которые может обнаружить SEIS, и которые, как надеялись, дадут информацию о марсианских недрах. [12]

Усилия по проникновению
[ редактировать ]В марте 2019 года HP 3 начал зарываться в поверхностный песок, но через несколько сантиметров остановился у того, что первоначально предположительно было большим камнем. [24] Дальнейший анализ и тестирование на точной модели на Земле показали, что проблема может быть связана с недостаточным трением. В июне 2019 года дополнительные доказательства этого были обнаружены, когда опорная конструкция была снята с HP. 3 крот. Марсианский реголит, казалось, сжался, оставив зазор вокруг зонда.
Был реализован метод с использованием роботизированной руки посадочного модуля для давления на почву рядом с зондом для увеличения трения почвы. [25] [26] [27] [28] В конечном итоге этот метод не смог создать достаточную направленную вниз силу, поскольку HP 3 Зонд находился на пределе досягаемости руки. [28]
Вместо этого команда использовала роботизированный черпак, чтобы прижать зонд к краю отверстия. Поначалу этот метод оказался успешным, поскольку зонд продолжал копать в течение двух недель, пока не оказался на одном уровне с поверхностью. [29] [30] В это время открытая верхняя часть зонда была слишком мала для того, чтобы совок мог прижиматься к нему, поэтому черпак был переставлен так, чтобы давить на почву рядом с зондом. К сожалению, это заставило зонд снова отступить из-за необычных свойств почвы и низкого атмосферного давления. [31] Когда зонд отскочил, рыхлая почва заполнила пространство под ним и снова подняла зонд наполовину. [32] В январе 2020 года команда снова применила метод закрепления, но зонд снова вылетел после изменения положения черпака. [33]
В феврале 2020 года команда переоценила риски, связанные с выдавливанием задней крышки крота напрямую с помощью роботизированной лопатки, и определила, что процедура приемлема. Процедура продвигалась медленно из-за необходимости менять положение совка после каждых 1,5 см хода. В июне 2020 года вершина крота достигла поверхности реголита. [34] Крот вышел на поверхность под углом 30 градусов от вертикали, но этот угол может уменьшиться при достижении большей глубины. [35]
В июле 2020 года выяснилось, что крот подпрыгивал на месте под ковшом, что свидетельствует о недостаточном трении для продолжения копания. Предлагаемое решение заключалось в том, чтобы заполнить яму песком, чтобы распределить давление роботизированного ковша и тем самым увеличить трение. Данная процедура была проведена в начале августа 2020 года. [36]
В конце августа 2020 года тест показал положительные результаты. Совок прикладывал нисходящую силу к песку, покрывавшему родинку, во время выполнения ударов молотком. Этот тест привел к прогрессу на несколько миллиметров, [37] и в конечном итоге похоронил инструмент. В октябре 2020 года вершина крота оказалась под поверхностью Марса, и было принято решение соскоблить еще два куска реголита и утрамбовать его роботизированным ковшом. [38] Ударные работы планировалось продолжить в январе 2021 года.
Последние попытки провести зонд глубже были предприняты 9 января 2021 года; после того, как они оказались безуспешными, было принято решение прекратить попытки копать глубже. 14 января 2021 года НАСА объявило, что, поскольку последняя попытка похоронить «крота» провалилась, команда сдалась, а часть миссии с тепловым зондом была объявлена завершенной. Ведущий ученый эксперимента Тилман Спон заявил, что «Марс и наш героический крот остаются несовместимыми». [39] Научная группа определила, что свойства почвы в месте приземления слишком отличаются от тех, для которых был разработан инструмент. В течение нескольких лет команда пробовала множество различных средств, чтобы заставить крота зарыться, но в конечном итоге попытки не достигли целевой глубины. Трения между почвой и зондом было недостаточно, чтобы крот забился глубже.
Крот действительно полностью похоронен; верхняя часть крота находится на 2–3 сантиметра ниже поверхности Марса (при длине самого крота около 40 сантиметров глубина, таким образом, составляла около 43 сантиметров). Для проведения полезных тепловых измерений минимальная необходимая глубина была указана как минимум 3 метра. [ нужна ссылка ]
Несмотря на то, что операции крота оказались безуспешными, они научили команду миссии многому о почве на площадке «Инсайт», о проведении раскопок/бурения на Марсе и об управлении роботизированной рукой посадочного модуля. При спасении кротов рука использовалась таким образом, который не был запланирован перед миссией. Сейсмометр ( SEIS ), радиоэксперимент ( RISE ) и метеорологические инструменты ( TWINS ) продолжали работать до конца декабря 2022 года. [40]
 Инженерный анализ крота после первоначальной проблемы пришел к выводу, что нижняя часть крота находилась на глубине около 12–14 дюймов (30–36 см) в марсианской земле, а часть его вершины все еще находилась внутри HP. 3 опорная структура.
Инженерный анализ крота после первоначальной проблемы пришел к выводу, что нижняя часть крота находилась на глубине около 12–14 дюймов (30–36 см) в марсианской земле, а часть его вершины все еще находилась внутри HP. 3 опорная структура. Insight компании HP 3 компоненты после снятия опорной конструкции с родинки. На этом изображении показана область сжатого реголита вокруг пенетрометра Крота.
Insight компании HP 3 компоненты после снятия опорной конструкции с родинки. На этом изображении показана область сжатого реголита вокруг пенетрометра Крота. Первоначальный успех метода закрепления показан на этом замедленном видео, на котором показано, как зонд погружается в реголит.
Первоначальный успех метода закрепления показан на этом замедленном видео, на котором показано, как зонд погружается в реголит. HP 3 виден после того, как он отошел примерно на полпути из ямы, которую он зарыл.
HP 3 виден после того, как он отошел примерно на полпути из ямы, которую он зарыл. Посадочный модуль Insight с помощью ковша нажимает на заднюю крышку HP. 3 крот.
Посадочный модуль Insight с помощью ковша нажимает на заднюю крышку HP. 3 крот. HP 3 крот на поверхности Марса, а посадочный ковш давит на его заднюю крышку.
HP 3 крот на поверхности Марса, а посадочный ковш давит на его заднюю крышку.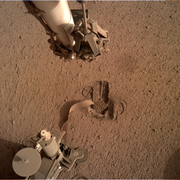 Крот, засыпанный песком роботизированным совком
Крот, засыпанный песком роботизированным совком Посадочный модуль Mars InSight — «Крот» — последние усилия
Посадочный модуль Mars InSight — «Крот» — последние усилия
(9 января 2021 г.)








Инфракрасный радиометр HP3-RAD
[ редактировать ]HP 3 включает в себя инфракрасный радиометр для измерения температуры поверхности, предоставленный DLR и основанный на радиометре MARA для миссии Хаябуса-2 . [13] [14] [15] HP3-RAD использует на термобатареях детекторы для измерения трех спектральных диапазонов: 8–14 мкм , 16–19 мкм и 7,8–9,6 мкм . [41] HP3-RAD имеет массу 120 г (4,2 унции). [41]
Детектор при посадке защищался съемной крышкой. [41] Крышка также служит мишенью для калибровки прибора, обеспечивая возможность калибровки HP3-RAD на месте. [41]
Инфракрасные радиометры были отправлены на Марс в 1969 году в качестве одного из четырех основных инструментов на пролетных космических кораблях «Маринер-6» и «Маринер-7» , и эти наблюдения помогли спровоцировать научную революцию в знаниях о Марсе. [42] [43] Результаты инфракрасного радиометра Mariner 6 и 7 показали, что атмосфера Марса состоит в основном из углекислого газа (CO 2 ), и выявили следы воды на поверхности Марса . [42]
См. также
[ редактировать ]- Mini-TES , инфракрасный прибор на марсоходах 2003 года.
Ссылки
[ редактировать ]- ^ Jump up to: а б Кларк, Стивен (19 декабря 2013 г.). «Марсианский посадочный модуль будет запущен из Калифорнии на Атласе-5 в 2016 году» . Космический полет сейчас . Проверено 20 декабря 2013 г.
- ^ «НАСА использует роботизированную руку InSight, чтобы отправить тепловой зонд на Марс — ExtremeTech» . www.extremetech.com . Проверено 22 марта 2020 г.
- ^ Данн, Марсия (14 января 2021 г.). «RIP: Марсианский экскаватор разваливается после двух лет пребывания на Красной планете» . Ассошиэйтед Пресс . Проверено 14 января 2021 г.
- ^ Jump up to: а б с д и Ударный механизм для эксперимента HP3 (InSight) . (PDF) Ежи Григорчук1, Лукаш Вишневский1, Бартош Кендзёра1, Мацей Борис, Рафал Пшибыла1, Томаш Куциньский1, Мацей Оссовски, Войцех Кониор, Олаф Кремер, Тильман Спон, Марта Токарж и Матеуш Бялек. Европейский симпозиум по космическим механизмам и трибологии ; 2016.
- ^ «Польский Крет полетит на Марс» . Наука в Польше . Проверено 5 мая 2018 г.
- ^ Jump up to: а б с д Банердт, В. Брюс (2012). InSight – Геофизическая миссия на Марс (PDF) . 26-е заседание группы анализа программы исследования Марса. 4 октября 2012 года. Монровия, Калифорния.
- ^ Jump up to: а б с д и «Тепловой зонд | Инструменты» . Марсианский посадочный модуль InSight НАСА . Проверено 13 апреля 2020 г. .
- ^ Jump up to: а б Гротт, М.; Спон, Т.; Банердт, ВБ; Смрекар, С.; Хадсон, TL; и др. (октябрь 2011 г.). Измерение теплового потока на Марсе: пакет теплового потока и физических свойств на GEMS (PDF) . Совместное заседание EPSC-DPS 2011. 2–7 октября 2011 г. Нант, Франция. Бибкод : 2011epsc.conf..379G . EPSC-DPS2011-379-1.
- ^ Эгл, округ Колумбия (20 августа 2012 г.). «Новая информация о Марсе ожидается от новой миссии НАСА» . НАСА. Архивировано из оригинала 29 июня 2017 года . Проверено 16 июля 2018 г.
- ^ mars.nasa.gov. «Цели | Наука» . Марсианский посадочный модуль InSight НАСА . Проверено 3 сентября 2019 г.
- ^ Кремер, Кен (2 марта 2012 г.). «Предлагаемый НАСА спускаемый аппарат InSight достигнет центра Марса в 2016 году» . Вселенная сегодня . Проверено 27 марта 2012 г.
- ^ Jump up to: а б mars.nasa.gov. «Наземные операции | Хронология» . Марсианский посадочный модуль InSight НАСА . Проверено 24 декабря 2018 г.
- ^ Jump up to: а б Банердт, В. Брюс (7 марта 2013 г.). InSight: Геофизическая миссия во внутреннюю часть планеты земной группы (PDF) . Комитет по астробиологии и планетологии. 6–8 марта 2013 г. Вашингтон, округ Колумбия.
- ^ Jump up to: а б «InSight: Подробно» . Исследование Солнечной системы . НАСА . Проверено 2 февраля 2018 г.
- ^ Jump up to: а б Гротт, М.; и др. (июль 2017 г.). «Радиометр MASCOT MARA для миссии Хаябуса-2». Обзоры космической науки . 208 (1–4): 413–431. Бибкод : 2017ССРв..208..413Г . дои : 10.1007/s11214-016-0272-1 . S2CID 118245538 .
- ^ «Зонд теплового потока HP3» . Портал ДЛР . Проверено 4 июня 2020 г.
- ^ Громов В.В. и др.: Мобильный пенетрометр - «крот» для исследования подземных слоев почвы. В Proc. 7-го Европейского симпозиума по космическим механизмам и трибологии. 1997.
- ^ Jump up to: а б Пакет теплового потока и физических свойств поверхности Меркурия . Тилман Спон, Карстен Зайферлин. Planetary and Space Science 49(14-15):1571-1577, декабрь 2001 г. дои : 10.1016/S0032-0633(01)00094-0
- ^ HP3 на ЭкзоМарсе . Краузе, Дж.; Иззо, М.; Ре, Э.; Мельс, Дж.; Рихтер, Л.; Косте, П. Генеральная ассамблея EGU 2009 г., состоявшаяся 19–24 апреля 2009 г. в Вене, Австрия.
- ^ Измерение теплового потока на Луне — Пакет теплового потока и физических свойств HP3. (PDF) Т. Спон, М. Гротт Л. Рихтер, Дж. Нолленберг, С. Е. Смрекар и группа инструментов HP3. Наземная геофизика на Луне (2010). Лунно-планетарный институт, конференция 2010 г.
- ^ «Развертывание приборов — SEIS/Mars InSight» . www.seis-insight.eu . Проверено 26 декабря 2018 г.
- ^ «InSight НАСА готовится измерить температуру Марса» . НАСА/Лаборатория реактивного движения . 13 февраля 2019 года . Проверено 13 апреля 2020 г. .
- ^ «Наземные операции» . Марсианский посадочный модуль InSight НАСА . Проверено 13 апреля 2020 г. .
- ^ Дикинсон, Дэвид (11 марта 2019 г.). «Крот» компании Mars Insight наткнулся на препятствие» . Небо и телескоп . ААС Скай Паблишинг, ООО . Проверено 1 сентября 2019 г.
- ^ Дикинсон, Дэвид (3 июля 2019 г.). «Стратегия возвращения посадочного модуля Mars Insight в буровой бизнес» . Небо и телескоп . ААС Скай Паблишинг, ООО . Проверено 31 августа 2019 г.
- ^ «InSight НАСА обнаружил «крота» » . НАСА/Лаборатория реактивного движения . Проверено 31 августа 2019 г.
- ^ Дворский, Георгий (3 октября 2019 г.). «Вот как НАСА могло бы спасти чрезвычайно застрявший тепловой зонд InSight» . Гизмодо . Проверено 4 октября 2019 г.
- ^ Jump up to: а б Гоф, Эван (18 октября 2019 г.). «Успех! НАСА подтверждает, что «крот» снова работает» . Вселенная сегодня . Проверено 19 октября 2019 г.
- ^ Кузер, Аманда. «Марсианский модуль НАСА, возможно, сможет спасти застрявшего «крота» » . CNET . Проверено 14 октября 2019 г.
- ^ Грейсиус, Тони (17 октября 2019 г.). «Крот» Mars InSight снова движется» . НАСА . Проверено 19 октября 2019 г.
- ^ mars.nasa.gov. «Крот Mars InSight частично вышел из своей норы» . Марсианский посадочный модуль InSight НАСА . Проверено 28 октября 2019 г.
- ^ Палка, Джо (29 ноября 2019 г.). «Крот» не роет Марс: инженеры НАСА пытаются выяснить, почему» . NPR.org . Проверено 29 ноября 2019 г.
- ^ «InSight попытается столкнуть крота на поверхность Марса» . SpaceNews.com . 21 февраля 2020 г. Проверено 25 февраля 2020 г.
- ^ Спон, Тилман (3 июня 2020 г.). «Журнал миссии InSight» . Блоги ДЛР . Проверено 4 июня 2020 г.
- ^ «Крот InSight медленно продвигается к поверхности Марса» . SpaceNews.com . 5 мая 2020 г. Проверено 7 мая 2020 г.
- ^ Спон, Тилман (10 августа 2020 г.). «Миссия Mars InSight: «Крот» уже «на месте», а «последние штрихи» уже «на виду» » . Блоги ДЛР . Проверено 7 сентября 2020 г.
- ^ «Операция НАСА по спасению посадочного модуля Insight Mars добилась прогресса в спасении «застрявшего» зонда | TESLARATI» . www.teslarati.com . 4 сентября 2020 г. Проверено 17 сентября 2020 г.
- ^ Гоф, Эван (16 октября 2020 г.). «Крот InSight теперь полностью похоронен!» . Вселенная сегодня . Проверено 19 октября 2020 г.
- ^ Данн, Марсия (14 января 2021 г.). «RIP: Марсианский экскаватор разваливается после двух лет пребывания на Красной планете» . Ассошиэйтед Пресс . Проверено 14 января 2021 г.
- ^ «Крот» НАСА InSight завершает свое путешествие на Марс» . Лаборатория реактивного движения. 14 января 2021 г. Проверено 15 января 2021 г.
- ^ Jump up to: а б с д Копп, Эмануэль; Мюллер, Нильс; Гротт, Матиас; Уолтер, Инго; Кнолленберг, Йорг; Ханшке, Франк; Кесслер, Эрнст; Мейер, Ханс-Георг (1 сентября 2016 г.). Стройник, Мария (ред.). «HP3-RAD: компактная конструкция радиометра с калибровкой на месте для исследований на месте» (PDF) . Инфракрасное дистанционное зондирование и приборостроение XXIV . 9973 : 99730Т. Бибкод : 2016SPIE.9973E..0TK . дои : 10.1117/12.2236190 . S2CID 125699932 .
- ^ Jump up to: а б «Инфракрасный спектрометр и исследование Марса» . Американское химическое общество . Проверено 26 декабря 2018 г.
- ^ Чдсе, Южная Каролина (1 марта 1969 г.). «Инфракрасный радиометр для морской миссии на Марс 1969 года». Прикладная оптика . 8 (3): 639. Бибкод : 1969ApOpt...8..639C . дои : 10.1364/AO.8.000639 . ISSN 1559-128X . ПМИД 20072273 .

